一种基于像元尺寸的显微系统景深计算方法
- 国知局
- 2024-06-21 12:04:32
本发明属于光学成像,尤其涉及一种基于像元尺寸的显微系统景深计算方法。
背景技术:
1、景深(dof)是指在物镜等成像器前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围。当以相机为成像探测器时,像焦平面前后移动的范围所呈现的清晰图像,对应物空间中,物焦平面前后移动的范围即为景深。
2、目前,对显微景深的计算方法,大多依据目视显微镜的工作原理进行景深的分析计算;2011年,天津大学的陈晓东等研究人员发表了“new method for determining thedepth of field of microscope systems”,该文献依据目视显微镜工作方式及特点,推导出以相机为图像探测器的显微系统即数字显微系统的景深计算方法,该方法得出数字显微系统相比于目视显微系统有更精确的景深数值,但仅讨论了存在于不同显微系统之间的景深数值优化,大景深是显微系统研究的热点,影响系统景深的因素有很多,以往增大显微系统景深,都是从显微物镜、焦距、物距等因素探讨,像元尺寸作为影响显微系统景深的其中一个因素,现阶段分析像元尺寸对光学显微系统景深影响的相关文献较少,而且都未给出具体的数值影响关系。
技术实现思路
1、本发明的主要目的在于提供一种基于像元尺寸的显微系统景深计算方法,该方法较为全面地建立了图像探测器中像元尺寸与光学显微系统总景深的数值关系,可以为显微系统优化设计提供指导。
2、为此,本发明提供的基于像元尺寸的显微系统景深计算方法,包括如下步骤:
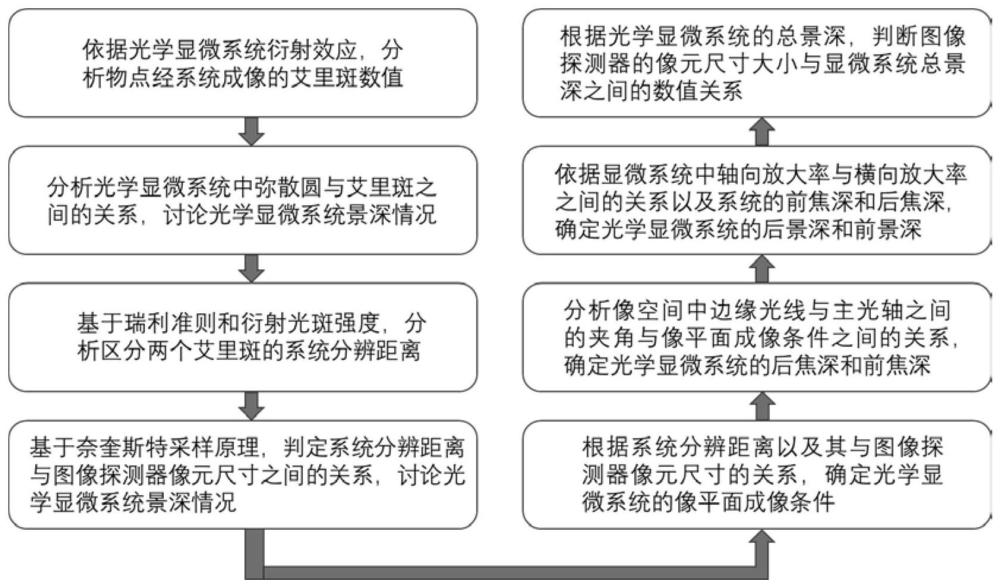
3、步骤1、依据光学显微系统衍射效应,分析物点经光学显微系统成像的艾里斑数值;
4、步骤2、根据光学显微系统中弥散圆与艾里斑之间的关系,分析光学显微系统景深情况;
5、步骤3、基于瑞利准则和衍射光斑强度,分析区分两个艾里斑的系统分辨距离;
6、步骤4、基于奈奎斯特采样原理,判定系统分辨距离与图像探测传感器的像元尺寸之间的关系,并分析光学显微系统景深情况;
7、步骤5、根据系统分辨距离以及其与图像传感器像元尺寸的关系,确定光学显微系统的像平面成像条件;
8、步骤6、依据光学显微系统中光线传播规律,分析像空间中边缘光线与主光轴之间的夹角与步骤5中像平面成像条件之间的几何关系,确定光学显微系统的后焦深和前焦深;
9、步骤7、依据光学显微系统中轴向放大率与横向放大率之间的关系,根据步骤6中光学显微系统的后焦深和前焦深,确定光学显微系统的后景深和前景深;
10、步骤8、根据步骤7所得光学显微系统的后景深和前景深,确定光学显微系统的的总景深,进而根据总景深,确定图像探测器的像元尺寸大小与光学显微系统总景深之间的数值关系。
11、具体的,光学显微系统的像平面成像条件为:
12、由于衍射效应及成像条件,物点在像平面上呈现的光斑,其数值等于艾里斑直径2r,此为成像要求一;
13、系统分辨距离δ即能够分辨像平面上相邻两个艾里斑,且等于图像探测器像元尺寸的2倍,此为成像要求二;
14、满足上述两个要求的光学显微系统的像平面成像条件为
15、具体的,在步骤6中,光学显微系统的后焦深和前焦深计算过程为:
16、物镜的基本参数为:横向放大倍率为β、数值孔径na、孔径光阑为2σ;且物镜或物镜搭配的管透镜与图像探测器之间的距离为l;在像空间中,构成后焦深的边缘光线与显微系统主光轴的夹角为γ,所述构成前焦深的边缘光线与显微系统主光轴的夹角为α;
17、艾里斑直径2r为
18、
19、光学显微系统的像平面成像条件为且边缘光线与主光线的夹角为γ和α;
20、根据几何关系,确定光学显微系统的后焦深x′2和前焦深x′1为
21、
22、
23、具体的,在步骤7中,光学显微系统的后景深和前景深计算过程为:
24、根据光学显微系统轴向放大率m与横向放大率β之间的关系:
25、m=(n′/n)β2
26、其中,n为物空间折射率,n′为像空间折射率,并定义:轴向放大率为m,横向放大率为β;
27、结合光学显微系统的后焦深x′2和前焦深x′1;
28、则光学显微系统的后景深x2和前景深x1为
29、
30、
31、具体的,在步骤8中,所述光学显微系统总景深与图像探测器像元尺寸的关系为:光学显微系统的总景深为后景深x2和前景深x1之和
32、
33、其中,光学显微系统的总景深表示为x;从系统总景深公式中得出,图像探测器的像元尺寸大小变化时,光学显微系统的总景深也随之变化;
34、具体的,由于衍射效应,光学显微系统物空间中物点经显微系统成像,在像平面上呈现光斑;中央是明亮的圆斑,周围有一组较弱的明暗相间的同心环状条纹,以第一暗环为界限的中央亮斑称作艾里斑,并定义艾里斑直径为2r;
35、具体的,在步骤2中,所述弥散圆与艾里斑之间的关系为:
36、其中,艾里斑与光学显微系统中透镜参数和光线性质有关,与物距无关;但物点在物空间中沿光轴前后移动,影响像平面上呈现的弥散圆大小,物体上各点在像平面上所成弥散圆大小影响成像质量;
37、由于艾里斑包含光学传递的大量能量,能充分说明物点信息;
38、为保证成像清晰且便于计算景深,本发明中:定义弥散圆直径等于系统艾里斑直径2r,且本发明后续所想要表达的弥散圆用光斑(艾里斑)替代;
39、则在像平面上弥散圆等于艾里斑直径的情况下,所对应的物空间中物点前后移动的距离,记为光学显微系统景深变化的一部分;
40、具体的,在步骤3中,所述光学显微系统分辨距离为:
41、基于瑞利准则和衍射光斑强度,所述系统分辨距离是区分光学显微系统中两个艾里斑之间的极限分辨距离;
42、其中,物体是由无数个物点组成,每个物点都遵循光学显微系统的衍射效应,在像平面上呈现无数个光斑(艾里斑);为保证图像清晰,则在像平面上需满足能够区分两个光斑(艾里斑)之间的系统分辨距离;
43、在本发明中,区分光学显微系统中两个光斑(艾里斑)之间的距离为系统分辨距离;选取能够区分两个光斑之间的最小距离作为本发明的计算量,即系统极限分辨距离;
44、在本发明中,以系统分辨距离表示系统极限分辨距离,并定义系统分辨距离为δ,且系统分辨距离δ等于艾里斑半径r;
45、具体的,在步骤4中,所述光学显微系统分辨距离与像元尺寸的关系为:依据奈奎斯特采样原理:只要离散信号的采样频率大于原始信号频率的2倍就可完美采样;
46、因此,本发明中系统分辨距离δ也是图像探测器能够分辨的最小距离,且等于图像探测器像元尺寸的2倍,并定义像元尺寸为
47、在满足的情况下,光学显微系统物空间中物点沿光轴前后移动的距离为景深变化的一部分。
48、本发明基于像元尺寸的显微系统景深计算方法,在充分考虑像点在图像传感器上的成像规律以及像点与图像传感器像元尺寸的成像关系后,给出了图像传感器像元尺寸与光学显微系统总景深的具体数值关系式,并通过与实验景深相比较,验证了数值关系式的准确性,可以为显微系统优化设计提供指导。
本文地址:https://www.jishuxx.com/zhuanli/20240618/25407.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表