一种基于独立控制策略的电动轨道机车控制系统的制作方法
- 国知局
- 2024-08-01 08:47:07
本发明涉及轨道交通控制,具体来说,涉及一种基于独立控制策略的电动轨道机车控制系统。
背景技术:
1、国内钢铁、矿山、石化、港口等大型工矿企业内部铁路运输广泛采用内燃机车,内燃机车机动灵活,不受天气、时间、供电影响,据初步统计,全国内燃机车保有量约8000余台,但是内燃机车存在污染排放高、运行成本大、机车性能差等诸多问题。为了响应国家绿色生产、节能减排号召,减少环境污染,降低运行成本,提高机车性能,工矿企业内部的内燃机车进行“油改电”势在必行。研发与应用改造后采用电池系统作为动力源,通过大功率igbt元件逆变为频率可调的三相交流电,驱动电机转动,从而驱动车辆运行。工矿企业新能源轨道机车控制系统技术主要涉及电力储能系统集成、机车储能牵引变流、机车整车控制等核心关键技术。
2、机车整车控制系统作为整个机车的核心控制部件,掌控整个机车运行和安全保护功能。机车整车控制系统采集各部件信号,做出相应逻辑判断,控制下层各设备的动作,驱动机车正常行驶。机车整车控制系统的优劣直接决定了机车的经济性、可靠性、安全性和其他性能。然而,目前电动轨道机车的整车控制系统故障率高,交互界面不够美观,不便于操作。随着电动轨道机车的业务不断拓展,亟需开发出一款性能稳定、界面美观、易于操作的整车控制系统,因此,本发明提出了一种基于独立控制策略的电动轨道机车控制系统。
技术实现思路
1、针对相关技术中的问题,本发明提出一种基于独立控制策略的电动轨道机车控制系统,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
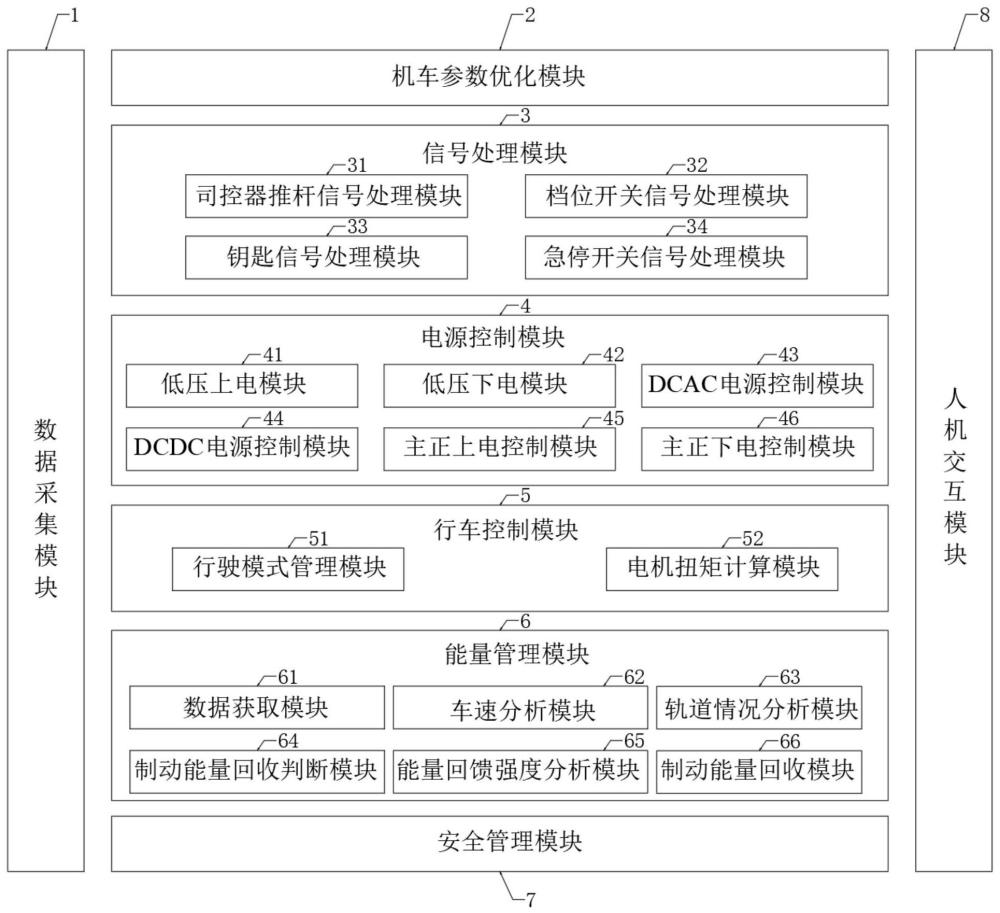
3、一种基于独立控制策略的电动轨道机车控制系统,包括数据采集模块、机车参数优化模块、信号处理模块、电源控制模块、行车控制模块、能量管理模块、安全管理模块及人机交互模块;
4、其中,数据采集模块,用于采集电动轨道机车中各部件的信号,包括加速踏板开度信号、制动踏板开度信号、档位信号、车速传感器信号、开关信号以及can总线上传的信号;
5、机车参数优化模块,用于利用机车参数优化算法结合轨道条件、气候特征及交通需求来优化车辆的间距及速度;
6、信号处理模块,用于分析处理司控器推杆信号、档位开关信号、钥匙信号及急停开关信号,得到对应的识别结果;
7、电源控制模块,用于根据驾驶员的操作意图信息向各个子控制器发送相应请求指令来实现车辆高低压上下电;
8、行车控制模块,用于根据驾驶员的操作意图信息向控制执行机构发送相应控制驱动指令来执行驾驶员的驾驶意图;
9、能量管理模块,用于根据操作杆开度、动力电池的充电状态值及轨道情况进行制动能量的管理;
10、安全管理模块,用于实时监控电动轨道机车在行驶过程中各部件的工作状态,并在车辆出现故障时确定故障等级;
11、人机交互模块,用于显示电动轨道机车的运行数据,还用于电动轨道机车的故障预警和故障报警。
12、进一步地,机车参数优化模块在利用机车参数优化算法结合轨道条件、气候特征及交通需求来优化车辆的间距及速度时包括:
13、以最小化能耗和交通流量为优化目标,初始化一组配置参数集,其中,每组配置参数包括车辆间距和速度;
14、获取不同地区的轨道数据、气候数据及交通需求数据,并进行预处理;
15、利用二维空间分割树记录所有配置参数的历史信息,并在二维空间分割树中为每个配置参数定义相应的子区域;
16、根据历史信息计算每个配置参数的变异方向,确保每个配置参数指向最优子区域,并对配置参数进行变异操作,得到新的配置参数;
17、对每个配置参数的各维度进行独立计算,保存潜在信息,并从新的配置参数和通过协同进化产生的配置参数中选择适应度最高的配置参数作为新的配置参数集;
18、结合轨道条件、气候特征及交通需求计算新的配置集群中每个配置参数的适应度值,并重复执行从配置参数集的初始化到适应度评估的步骤,直至达到预设的迭代次数或满足于适应度阈值,得到最优配置参数;
19、将得到的最优配置参数作为满足目标轨道条件、气候特征及交通需求的最优车辆间距及速度。
20、进一步地,轨道数据包括轨道材质、坡度及弯曲程度,气候数据包括风速和温度,交通需求数据包括交通流量和车辆密度。
21、进一步地,配置参数变异操作的表达式为:
22、vi+1=vi+α·(pbest-vi)+β·(gbest-vi)
23、式中,vi+1表示新的配置参数,vi表示当前代的配置参数,pbest表示个体历史上最好的位置,gbest表示全局最好的位置,α和β分别表示个体和群体学习的影响权重。
24、进一步地,对每个配置参数的各维度进行独立计算,保存潜在信息,并从新的配置参数和通过协同进化产生的配置参数中选择适应度最高的配置参数作为新的配置参数集包括:
25、将每个配置参数分解成独立的维度,计算每个维度的适应度值;
26、在计算过程中收集记录每个维度的性能数据,分析各个维度的性能趋势和潜在优化方向;
27、通过协同进化法基于已有的配置参数生成新的配置参数,并对新的配置参数进行评估以确定适应度;
28、将新的配置参数和通过协同进化产生的配置参数进行适应度比较,并选出适应度最高的配置参数,得到新的配置参数集。
29、进一步地,结合轨道条件、气候特征及交通需求计算新的配置集群中每个配置参数的适应度值的计算公式为:
30、a=ω1·f(t)+ω2·f(c)+ω3·f(w)
31、式中,a代表适应度值,f(t)表示轨道条件评估函数,f(c)表示气候特征评估函数,f(w)表示交通需求评估函数,w1、w2、w3分别轨道条件评估函数、气候特征评估函数、交通需求评估函数的权重系数。
32、进一步地,信号处理模块包括司控器推杆信号处理模块、档位开关信号处理模块、钥匙信号处理模块及急停开关信号处理模块;
33、其中,司控器推杆信号处理模块,用于处理司控器的加速及制动信号;
34、档位开关信号处理模块,用于通过档位开关信号识别驾驶员的换挡意图并转换为电信号;
35、钥匙信号处理模块,用于对钥匙信号进行滤波处理,并计算开关信号的保持时间;
36、急停开关信号处理模块,用于处理急停开关信号,包括开关信号和遥控器信号的逻辑运算。
37、进一步地,电源控制模块包括低压上电模块、低压下电模块、dcac电源控制模块、dcdc电源控制模块、主正上电控制模块和主正下电控制模块;
38、其中,低压上电模块,用于对电动轨道机车的低压电源进行充电;
39、低压下电模块,用于将电动轨道机车的低压电源从工作状态安全地转换到关闭状态;
40、dcac电源控制模块,用于根据bms主负吸合的状态,发送工作控制指令给dcac逆变器控制直流电到交流电的转换;
41、dcdc电源控制模块,用于在bms主负吸合后,发送工作控制指令给dcdc转换器控制直流电之间的转换;
42、主正上电控制模块,用于在满足预设条件时启动高压上电流程;
43、主正下电控制模块,用于在发生严重故障、急停或其他预设条件时断开主正继电器。
44、进一步地,行车控制模块包括行驶模式管理模块和电机扭矩计算模块;
45、其中,行驶模式管理模块,用于通过整车故障、准备状态、挡位信号、插枪信号、充电状态、急停信号的状态约束条件结合控制策略判定电动轨道机车的行驶模式,行驶模式包括停车模式、驱动模式、刹车回馈模式及滑行回馈模式;
46、电机扭矩计算模块,用于根据制动和加速踏板的开度值、车辆当前挡位所处的状态及车辆当前行驶的状况计算对应的扭矩需求值,扭矩需求值包括驾驶员需求扭矩、目标需求扭矩及最终需求扭矩。
47、进一步地,能量管理模块包括数据获取模块、车速分析模块、轨道情况分析模块、制动能量回收判断模块、能量回馈强度分析模块及制动能量回收模块;
48、其中,数据获取模块,用于获取制动操作杆和制动操作杆的开度信号、动力电池的充电状态值及机车轨道的坡度数据;
49、车速分析模块,用于根据制动操作杆和制动操作杆的开度信号分析电动轨道机车的运动状态,运动状态包括加速状态、匀速状态及刹车状态;
50、轨道情况分析模块,用于根据机车轨道的坡度数据对当前轨道的情况进行分析,轨道情况包括上坡轨道、水平轨道及下坡轨道;
51、制动能量回收判断模块,用于根据电动轨道机车的运动状态、动力电池的充电状态值及轨道情况判断是否进行制动能量回收;
52、能量回馈强度分析模块,用于根据电动轨道机车的运动状态、动力电池的充电状态值及轨道情况分析得到对应的能量回馈强度;
53、制动能量回收模块,用于根据分析得到能量回馈强度控制电动轨道机车进行制动能量回收。
54、本发明的有益效果为:
55、1)本发明不仅可以根据驾驶员意图输出驱动或制动扭矩来驱动电动轨道机车进行正常行驶,从而可以基于精确的数据采集和信号处理结合高效的电源和行车控制来确保电动轨道机车能够在各种环境和交通条件下的高效运行和安全性,而且还可以根据操作杆开度、动力电池的充电状态值及轨道情况进行制动能量的管理,从而可以利用先进的能量管理策略有效地管理制动能量回收和电池充电,提高能源利用效率,减少能耗,同时还可以利用机车参数优化算法结合轨道条件、气候特征及交通需求来优化车辆的间距及速度,从而可以通过调整车辆间距和速度来优化空气动力学效应,进一步降低能耗,进而使得电动轨道机车能够在不同的轨道条件和气候特征下进行定制化的高效运行,可以更好的满足使用需求。
56、2)本发明通过利用机车参数优化算法结合轨道条件、气候特征及交通需求来优化车辆的间距及速度,从而不仅可以利用二维空间分割树记录演化过程中的车辆间距速度的解和适应度值,而且还可以引入动态协同机制更好地利用历史信息中车辆间距及速度的下文信息,有效的提高变异粒子的性能,从而能够更准确、高效地进行车辆间距和速度参数的优化,提高电动轨道机车的运行性能和安全性,增强了对不同轨道条件、气候特征和交通需求的适应性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233312.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表