一种在线实时货运列车车辆定位方法与装置与流程
- 国知局
- 2024-08-01 08:50:24
本发明涉及到货运列车车辆精确定位,具体涉及到为解决在列车装载货物和调度时由于定位不准而造成的运载效率低下的问题而发明的一种定位方法及装置,尤其涉及一种提高铁路货车车辆实时定位精度的方法及装置。
背景技术:
1、铁路货运是我国铁路运输的主体,占到运输总周转量的90%左右,同时铁路运输也是货运的主要形式,据统计世界铁路运输占货物运输的40%。近年来,随着我国国家经济快速发展,铁路货运业的运输量呈现逐年增长的趋势,煤炭、钢铁等重要原材料的运输需求也与日俱增,货运铁路的负担也逐渐加重。在列车车辆停靠站台装货的过程中,装货区往往不可能容下列车全车停靠,因此装货也往往采用逐个或多个车辆装载,在装载区的车辆装满后列车司机会操纵列车行驶一段距离以使得其他列车车辆进入装载区继续装载。然而,由于司机无法确切掌握车辆的实时位置,目前需要通过一名站在车辆尾部的工作人员进行人工判断,而后通过对讲机和司机对接信息,因此经常会出现由于司机和工作人员的信息交接的不准确性和效率低下而造成的获取信息的不对等,继而造成的需要反复调整列车位置且存在部分车辆未满装甚至未装的情况,由此而造成的资源浪费和运输效率降低的问题。而传统列车定位方式又存在成本较高、工程量较大等弊端。
2、因此,迫切需要一种能够精确定位列车车辆位置的方法和装置,能在尽可能低成本下对货运列车及其所有载货车辆进行定位的方式。
技术实现思路
1、本发明的目的是提出一种在线实时货运列车车辆定位方法与装置,在尽可能降低成本的前提下提高列车运输效率,解决因定位不准而造成的货运列车装载调控效率低下的问题。
2、为达成此目的,本发明采用了以下技术方案。(附图一)
3、本发明提出的一种在线实时货运列车车辆定位装置,包括:
4、安装于机车司机室的北斗定位模块:与数据处理模块连接,基于北斗定位系统对机车坐标进行实时动态定位,获取机车实时经纬度坐标。
5、安装于机车司机室的数据处理模块:与数据显示模块、北斗定位模块连接,接收北斗定位模块的机车坐标数据,结合车辆换长概念换算具体车辆的实时位置信息并将其输出,车辆换长表示以列车车辆前后两钩舌内侧距离按11.5m为一换算单位(附图二)。具体处理方式为:建立大地坐标系,在系统内将列车车辆由机车起按顺序进行编号,利用车辆换长计算具体车辆坐标数据(此间将车辆远离机车侧钩舌内侧坐标作为车辆坐标)。
6、安装于机车司机室的数据显示模块:与数据处理模块、数据显示模块连接,接收数据处理模块的车辆实时经纬度坐标数据,并将信息显示给司机。
7、数据传输模块:与数据处理模块、数据显示模块连接,将处理后的列车车辆位置数据传输给列车调度中心,利用5g通讯将数据同步给货运站调度中心,实现统一调度。
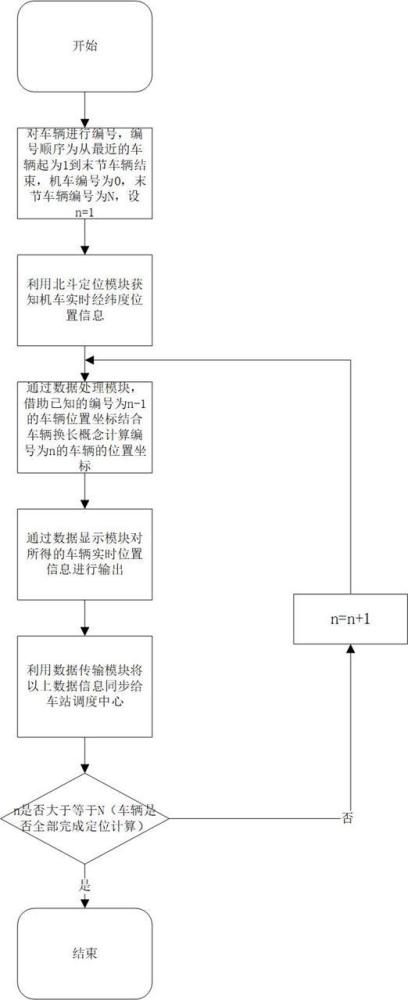
8、本发明提出的一种在线实时货运列车车辆定位方法,具体处理步骤如下。
9、1)建立大地坐标系o-xyz(附图三),坐标系z轴指向地球参考椭球的北极,x轴指向起始子午面与赤道的交点,y轴位于赤道面上且按右手系与x轴呈90度夹角。
10、2)将列车进行编号,自机车端开始的第一节车辆编号为1顺序向后编号,机车编号记作0。
11、3)确定轨道的详细位置信息,将轨道以机车位置为中点每50m长度为标准分段,以此为基础在大地坐标系中建立分段函数方程(式4)用以模拟轨道位置信息,将模拟轨道位置方程存入数据处理模块。
12、4)将已知的机车经纬度坐标利用大地坐标系转换为空间直角坐标的形式(式1),若要计算编号为n的车辆的坐标信息,则以编号为n-1节车辆的大地坐标为圆心,以换长+(为机车司机室距离编号为1的车辆的前钩舌的距离,仅在计算第一节车辆坐标时需要考虑。n=1时值取0;n>1时的值取0)为半径,在大地坐标系中建立模拟球面方程(式3),此处将模拟轨道位置方程用分段直线函数方程(式4)表示,联立二者(式4、式3)得到两个交点a、b的坐标,根据列车运行方向和机车所处位置进行判断并得到唯一值(分为自西向东或自东向西、牵引或推进),再将其转化为经纬度坐标(式2)(附图3),此即为编号为n的车辆的实时经纬度坐标。
13、具体计算公式如下。
14、式1:
15、
16、其中,、、分别表示编号为n的车辆的实时大地坐标,表示地球第一偏心率,表示卯酉圈曲率半径,表示编号为n的车辆纬度,表示编号为n的车辆经度,表示编号为n的车辆高程。(注:当n=0时,公式中的大地坐标及经纬度坐标均为机车位置坐标)
17、式2:
18、
19、其中,、 、分别表示编号为n的车辆实时大地坐标,表示编号为n的车辆纬度,表示编号为n的车辆经度,表示编号为n的车辆高程,为卯酉圈曲率半径。
20、式3:
21、
22、其中,、 、分别表示编号为n的车辆实时大地坐标,、、分别为编号为n-1的车辆实时大地坐标,表示车辆换长,表示从司机室到第一节车辆前钩内侧的距离(n=1时值取0,此时的、、为、 、、,即为机车实时大地坐标;n>1时的值取0)。
23、式4:
24、
25、其中,、 、 分别为轨道上各点的坐标,、、分别表示该轨道分段上的一已知点的坐标信息(统一规定为该分段中点的坐标信息),表示不同轨道分段的编号,表示参数,a、b、c分别为直线在x、y、z方向上的斜率。
26、该公式表示模拟分段函数在一段定义域区间内的一般函数表达式,此处以直线方程为例。
27、具体计算样例:已知机车经纬度(纬度 经度),求解第n节车辆具体坐标的方式。
28、首先利用已知编号为0的车辆(机车)坐标计算第1节车辆坐标信息,利用式1,如下所示:
29、
30、由此得到编号为0的车辆(机车)实时大地坐标(, ,),模拟球面方程,将换长记作11.5m,记作5m,式3具体应用如下所示:
31、
32、该分段上轨道方程模拟为式4设为:
33、
34、联立式3、式4记:
35、
36、将所得分别带入式4,得到两组坐标数据,带入得到坐标1(, , )、带入得到坐标2(, , )。
37、以附图三为例进行分析。
38、1、若列车行驶方向为上行(设图示a->b为上行方向),机车在前,采取牵引形式,则保留a点坐标。
39、2、若列车行驶方向为上行(设图示a->b为上行方向),机车在后,采取推进形式,则保留b点坐标。
40、3、若列车行驶方向为下行(设图示b->a为下行方向),机车在前,采取牵引形式,则保留b点坐标。
41、4、若列车行驶方向为下行(设图示b->a为下行方向),机车在后,采取推进形式,则保留a点坐标。
42、该保留坐标即为编号为1的车辆的实时大地坐标。
43、利用式2:
44、
45、将编号为1的车辆的大地坐标转化为经纬度坐标,即得编号为1的车辆的实时经纬度坐标。
46、要得到编号为n的车辆的实施经纬度坐标,仅需重复以上步骤得到编号为n-1的车辆的实时经纬度坐标后在经过一次循环计算即可。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233583.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表