一种铁路营业线防侵限系统及方法与流程
- 国知局
- 2024-08-01 09:07:50
本发明涉及铁路安全防护,尤其与一种铁路营业线防侵限系统及方法相关。
背景技术:
1、随着国家基础建设的高速发展,铁路线的里程也越来越长,并且在铁路线旁边进行施工的情况也越来越多,比如桥梁的架设等,在施工过程中都会出现大量的施工人员以及施工设备,若是工人或者施工设备距离铁路线过近,而此时又有列车经过,就可能发生事故,所以铁路异物侵限事件严重威胁列车以及人员的安全,影响铁路的正常运行。
2、现有技术中,通常会在列车上设置监测系统,以便于及时对异物侵限轨道做出反应,但是由于行人的主观能动性使得人员入侵更具突发性和不确定性,所以难以从根源上杜绝铁路异物侵限事件的发生,并且由于列车的速度极快,难以在有限时间内及时做出反应,而即便及时做出反应,也有可能由于刹车距离过长而导致事故的发生,尤其在铁路线旁进行施工时,活动的人员众多,施工人员更有可能由于安全意识的缺乏对铁路进行侵限,事故发生的概率大幅提升,并且施工人员在操作挖机等设备时,也有可能由于观察不仔细而导致施工设备对铁路线造成侵限,进而导致事故的发生。
技术实现思路
1、针对上述相关现有技术的不足,本技术提供一种铁路营业线防侵限系统及方法,能够实时进行监测,避免工人或者设备侵限铁路线,防止事故发生,具有较强的实用性。
2、为了实现上述目的,本发明采用以下技术:
3、一种铁路营业线防侵限系统,包括:安装于铁路线长度方向一侧且互相平行的防护装置和监测系统;
4、防护装置包括:
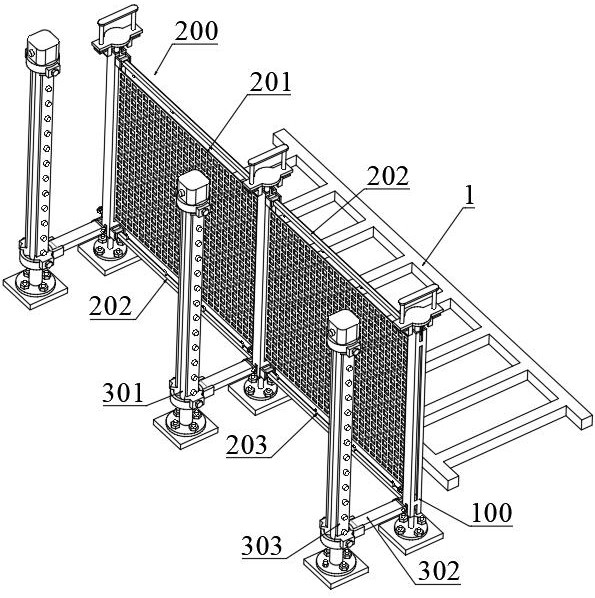
5、多个沿铁路线长度方向依次间隔布置的支撑杆,支撑杆内部沿竖直方向设有绕自身轴线转动的连接轴;
6、阻挡机构,包括多个分别设于相邻两个支撑杆之间的拦截网,拦截网一端安装于连接轴上,另一端可拆卸地安装于相邻的支撑杆侧面;
7、监测系统包括多个位于防护装置远离铁路线的一侧并沿铁路线长度方向一侧间隔布置的立杆,立杆侧面通过转动的连杆与支撑杆连接,立杆上还设有两个绕自身轴线转动的转动板,其中一个转动板上沿自身长度方向设有多个激光发射点,另一个转动板上沿其长度方向设有多个激光接收点,立杆上端设有至少一个转动的相机,相机、激光发射点以及激光接收点均连接于监控单元,监控单元连接于监控中心,监控中心连接于控制终端。
8、进一步地,支撑杆内部设有空腔,连接轴转动安装于空腔内,且连接轴上设有弹性元件,用于迫使连接轴转动。
9、进一步地,拦截网上下两侧设有横杆,横杆侧面沿其长度方向设有多个挂钩,应用时,挂钩与拦截网连接,横杆一端转动连接于转动块上,转动块转动安装于支撑块上,支撑杆两端均设有凹槽,凹槽中设有凸杆,且凸杆一端超出支撑杆的端面,支撑块套设于凸杆上。
10、进一步地,凹槽两垂直侧均设有卡槽,应用时,支撑块卡设于其中一个卡槽中。
11、进一步地,支撑杆侧面设有两个l形板,用于承接横杆的另一端,支撑杆上端还设有连接板,连接板上穿设有两个竖杆,竖杆上端连接于挡板上,用于抵接到连接板,竖杆下端设有卡块,卡块呈u形,应用时,对横杆两侧限位。
12、进一步地,支撑杆侧面设有支杆,支杆上套设有侧板,侧板侧面设有定位杆,定位杆一端穿设于连杆中,支杆一端设有挡圈,支杆上套设有弹簧,弹簧两端分别抵接到侧板和挡圈,且始终处于压缩状态。
13、一种铁路营业线防侵限方法,包括步骤:
14、s01、搭建如上方所述的铁路线防侵限系统:将支撑杆、立杆安装于铁路线的一侧,在相邻支撑杆设定拦截网,并将立杆通过连杆与支撑杆连接,使支撑杆与立杆之间的间距固定,将相机、激光发射点以及激光接收点启动,同时将相机、激光发射点以及激光接收点与监控单元形成数据传输,并且在控制终端以铁路线无人、无施工设备的图像作为源域;
15、s02、相机对场景进行连续拍照,形成连续多帧图像,将多帧图像作为目标域数据,并经过监控单元、监控中心传输至控制终端;
16、s03、对目标域中的图像进行预处理,预处理依次包括图像滤波处理、图像增强处理、利用拉普拉斯算子对图像进行锐化处理;
17、s04、对预处理的图像进行特征提取;
18、s05、对提取特征中的目标进行识别,并与源域中的图像进行对比,同时对威胁等级进行估计,若识别异物为人,则将当前的发送的危险等级提升为第二等级,若识别为施工设备,则保持当前所要发送的危险等级,当前所要发送的危险等级为第三等级,当异物与相机之间的距离小于一个限值,则将当前的发送的危险等级覆盖,并将当前所要发送的危险等级提升至第一等级;
19、s06、第一次预警;
20、s07、当施工设备或者人员继续移动,并侵限至激光处时,激光被阻挡,将信号传输至控制终端,则判定激光被阻挡的时间,当激光被阻挡时间超过限值,则将当前所要发生的危险等级覆盖,并提升至最高等级;
21、s08、第二次预警。
22、进一步地,步骤s02包括以下步骤:
23、s021、获取目标数据:获取需要捕获跟踪的目标的相关信息,例如大小、位置等;
24、s022、相机等待:启动相机处于等待工作状态;
25、s023、相机获取数据:相机对图像数据进行采集、压缩和传输;
26、s024、改变光圈:调整相机光圈;
27、s025、捕获目标:对目标进行捕获;
28、s026、跟踪目标:对目标进行跟踪任务;
29、s027、控制模式切换:将相机的工作模式切换为跟踪模式。
30、进一步地,步骤s03中的图像滤波处理包括以下步骤:
31、s031、选择小波基函数和分解层数,对图像进行小波分解,得到小波分解系数;
32、s032、对小波分解系数进行阈值量化,得到小波系数(逼近系数,水平、垂直与对角线三个方向的细节系数)估值;
33、s033、用小波系数估值通过小波逆变换进行图像重构;
34、将小波系数带入gcv阈值函数中,得到gcv阈值tgcv为:;
35、其中小波系数的个数为n,信号在阈值处理中被置为0的系数个数为n0,i为观测数据的数量,两数取小用^表示,带噪小波系数为yi,t为小波系数,阈值处理后的系数为ηt(yi),设
36、
37、是理想阈值,其中r(t)是均方误差函数,,
38、xi为代表第i个样本的特征向量,即可通过小波逆变换,得到去噪图像。
39、进一步地,步骤s03中的图像增强处理包括以下步骤:
40、s034、灰度化处理:将所有像素点在红、绿、蓝三通道的值依据对应关系转化到单通道灰度值,公式为f(i,j)=0.2981r(i,j)+0.5923g(i,j)+0.1138b(i,j),其中r(i,j)、g(i,j)、b(i,j)分别是在像素点(i,j)处的红、绿、蓝三通道的分量;
41、s035、直方图均衡化处理:首先统计输入图像中,像素点总数以及各灰度级出现的像素数目,得到灰度统计直方图;然后将灰度统计直方图积分函数作为映射函数,实现对直方图的均衡化,在不破坏原图像灰度级次序的情况下,保证均衡后的图像灰度值不会溢出,公式为
42、,
43、其中nu为图像中灰度值为u的像素个数,n为图像中的像素总和,k0为可能的灰度值总数。
44、本发明有益效果在于:
45、通过监测系统能够实时对人员以及施工设备进行监测,在工人或者施工设备即将侵限铁路线时及时进行预警,从而防止工人或者设备侵限铁路线,避免事故发生;并且在检测系统与铁路线之间设置一层拦截网,实现一层实体防护网,避免工人或者施工设备距离铁路线过近,并且拦截网也能对施工过程中飞溅的异物进行拦截,进一步防止事故的发生。
本文地址:https://www.jishuxx.com/zhuanli/20240718/235010.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表