系统的制作方法
- 国知局
- 2024-08-02 16:16:56
本公开涉及一种系统。
背景技术:
1、曾经提出了一种用于提高作为无人驾驶航空器的无人机在飞行时的安全性的控制方法(例如参照专利文献1)。
2、专利文献1公开的技术是,利用各种手段对无人机的飞行的异常进行检测,利用被设置在电线或者电线杆等的回收机构,来回收进行异常飞行的无人机。
3、(现有技术文献)
4、(专利文献)
5、专利文献1日本特开2018-12477号公报
技术实现思路
1、发明要解决的课题
2、然而,采用了上述的专利文献1的无人驾驶航空器的系统中存在改善的余地。
3、于是,本公开提供一种与以往相比得到了进一步改善的系统。
4、用于解决课题的手段
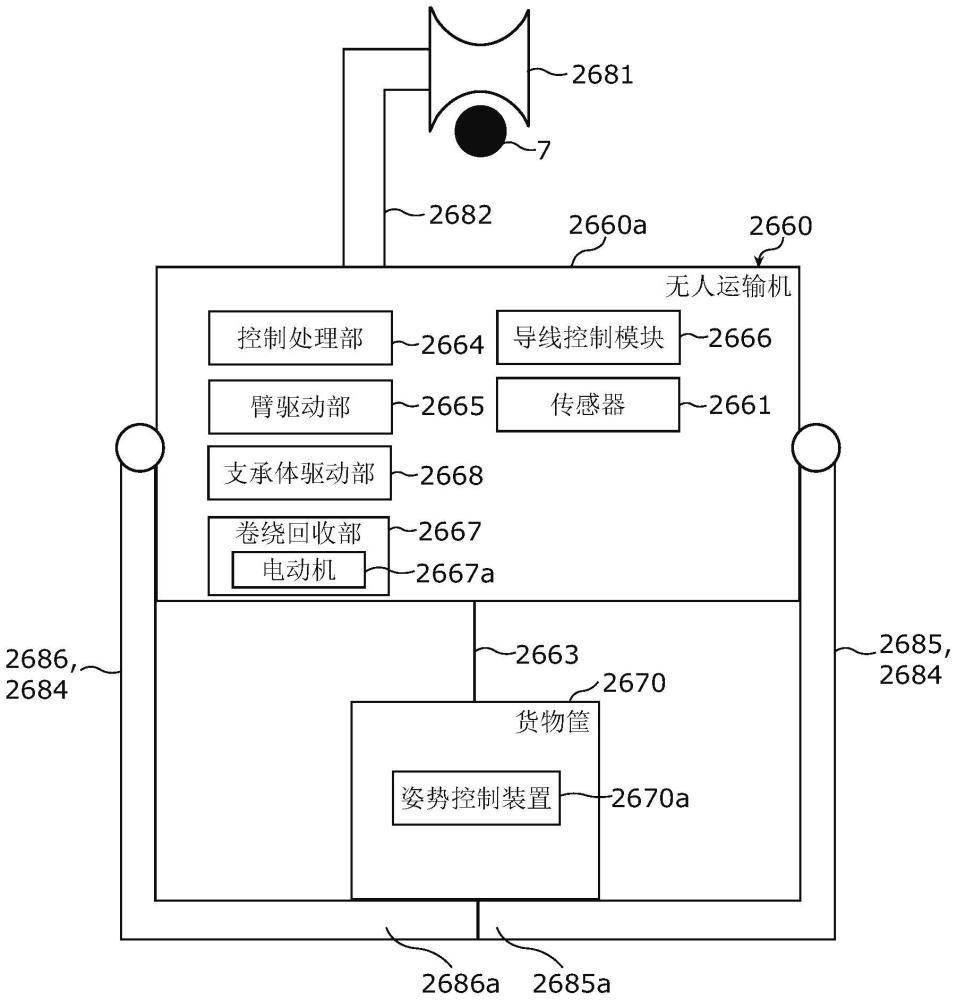
5、本公开的一个方式所涉及的控制方法是包括无人运输机的系统的控制方法,在从所述无人运输机的主体向下方延伸的导线上连接有用于放入由所述无人运输机运输的货物的货物筐,所述货物筐具备姿势控制装置,通过对旋转体进行控制,来控制由所述导线吊挂状态下的所述货物筐的姿势,在所述货物筐中形成有用于收纳所述货物的收纳空间,在该控制方法中获取来自能够对所述货物筐的姿势进行检测的传感器的感测结果,并根据获取的感测结果,所述姿势控制装置对所述旋转体进行控制,从而使所述货物筐成为目标的姿势。
6、另外,这些概括性的或具体的方式可以由无人运输机、无人驾驶航空器、系统、控制方法、集成电路、计算机程序或计算机可读的cd-rom等记录介质来实现,也可以通过对这些进行任意的组合来实现。
7、发明效果
8、本公开的系统能够期待进一步的改善。
技术特征:1.一种系统,是包括无人运输机的系统,
2.如权利要求1所述的系统,
3.如权利要求1所述的系统,
4.如权利要求1至3的任一项所述的系统,
5.如权利要求1至3的任一项所述的系统,
6.如权利要求5所述的系统,
7.如权利要求5所述的系统,
8.如权利要求1至3的任一项所述的系统,
9.如权利要求8所述的系统,
10.如权利要求1至3的任一项所述的系统,
11.如权利要求1至3的任一项所述的系统,
12.如权利要求11所述的系统,
13.如权利要求12所述的系统,
14.如权利要求1至3的任一项所述的系统,
15.如权利要求1至3的任一项所述的系统,
16.如权利要求1至3的任一项所述的系统,
17.如权利要求1至3的任一项所述的系统,
18.如权利要求1至3的任一项所述的系统,
技术总结提供一种系统,该系统具备无人运输机(2660)、能够放出以及卷绕回收导线(2663)的第1卷扬机(卷绕回收部(2667))、与导线(2663)连接并用于放入由无人运输机(2660)运输的货物的货物筐(2670)、以及控制器。并且,货物筐(2670)包括以在铅垂方向延伸的旋转轴(2671a)为中心来旋转的姿势控制装置(2670a),并且在货物筐(2670)形成有用于收纳货物的收纳空间即第1收纳空间(2674)。并且,控制器获取来自能够对货物筐(2670)的姿势进行检测的传感器(2661)的感测结果,并根据获取的感测结果对飞轮进行旋转控制,以使货物筐(2670)以旋转轴(2671a)为中心旋转到成为目标的姿势。技术研发人员:大岛光昭,青山秀纪,高浜拓也,村松史雄,鹫见阳介,天海了辅,梶川刚志,池内淳也受保护的技术使用者:松下电器(美国)知识产权公司技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/250139.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。