一种挂轨机器人行走爬坡一体机构的制作方法
- 国知局
- 2024-08-02 16:17:45
【】本技术涉及挂轨机器人领域,特别涉及一种挂轨机器人行走爬坡一体机构。
背景技术
0、背景技术:
1、目前,随着我国经济的高速发展,管廊隧道、电力隧道、交通隧道等越来越多,且隧道一般位于地下,空间封闭,较为狭小,容易泄露易燃易爆的危险气体,形成火灾等隐患。如何确保综合管廊、地铁隧道等的消防安全运营成为一大难题。目前,为解决这类问题,众多企业均采用巡检机器人代替工人进行巡检工作。
2、但现有的挂轨巡检机器人存在如下问题:
3、(1)、在进行大坡度轨道运行时会出现打滑现象,导致驱动轮失效;目前解决上述问题的方法是增加备用爬坡驱动装置,两套驱动装置通常包括驱动电机、减速机、驱动轮等,导致整体结构较大,重量重,能耗大,成本高,控制较为复杂等问题。
4、(2)、现有巡检机器人随着工作时间的增加,其包胶层磨损严重,导致驱动链轮极易发生跳齿的现象,导致巡检机器人出现遛坡的情况发生。
技术实现思路
0、技术实现要素:
1、本实用新型旨在解决上述问题而提供一种挂轨机器人行走爬坡一体机构,解决现有现有巡检机器人面对水平轨道和倾斜轨道需要分开驱动,从而导致机器人结构复杂,重量大且控制成本高的问题,同时也解决了现有巡检机器人在隧道中运行时易发生驱动链轮跳齿的问题。
2、为达此目的,本实用新型采用以下技术方案:
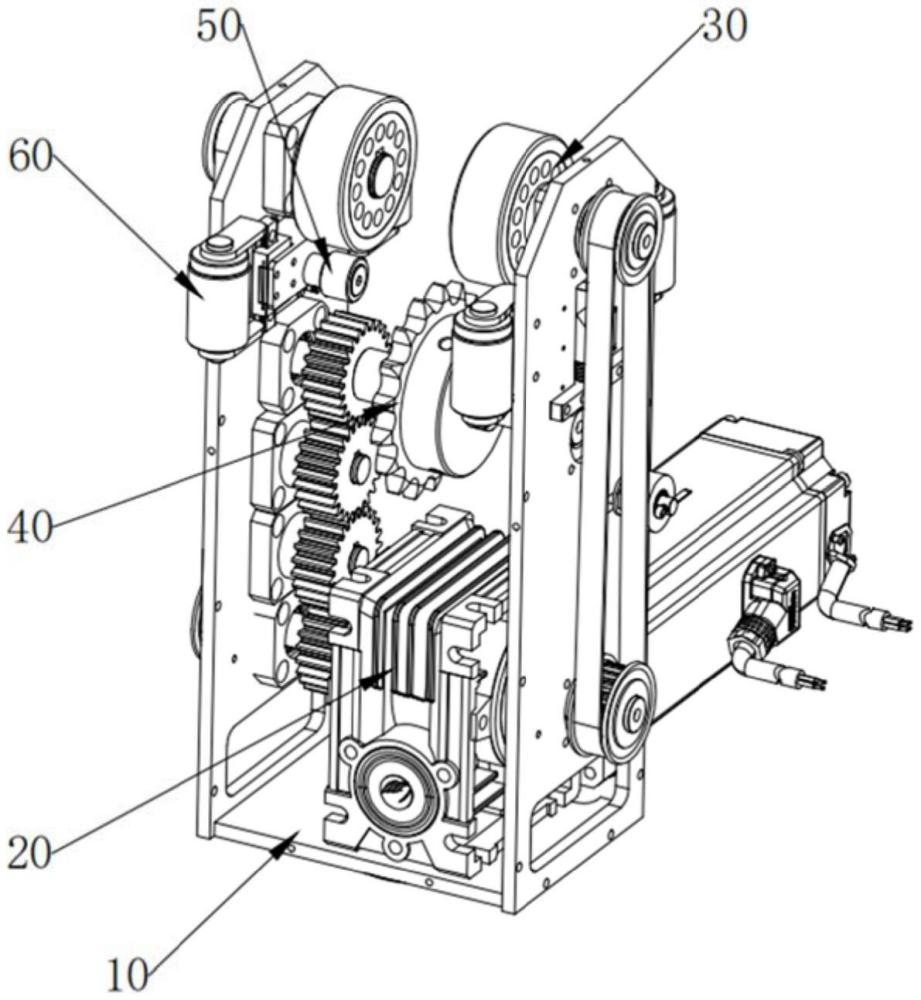
3、一种挂轨机器人行走爬坡一体机构,包括:
4、安装座及设于安装座内的驱动装置,所述驱动装置用于驱使巡检机器人于轨道上运行;
5、行驶装置,用于驱使巡检机器人于水平轨道上运行,所述行驶装置包括第一传动装置、驱动轮毂和包胶层,所述第一传动装置的一端与安装座连接,另一端与所述驱动轮毂连接,所述驱动轮毂的外周设有一圈凸台,所述包胶层套设于所述驱动轮毂和凸台上,巡检机器人于水平轨道上运行时,所述包胶层与轨道滚动摩擦;
6、爬坡装置,用于驱使巡检机器人于倾斜轨道上运行,所述爬坡装置包括第二传动装置和驱动链轮,所述第二传动装置的一端与安装座连接,另一端与所述驱动链轮连接,倾斜轨道的底部设有链条,爬坡装置驱使巡检机器人于倾斜轨道上运行时,所述驱动链轮与链条啮合。
7、优选的,所述包胶层内设有与凸台相匹配的凹槽,所述包胶层通过所述凹槽与驱动轮毂连接。
8、优选的,所述凸台套设于所述凹槽内时,所述包胶层内任一直径上所述凸台的顶部或所述凹槽的槽底与包胶层外表面之间的距离不大于3mm。
9、优选的,所述第一传动装置包括第一同步轮、第二同步轮、同步带和轮轴;
10、所述第一同步轮连接于驱动装置的输出轴,所述第二同步轮位于第一同步轮的正上方,所述第一同步轮和第二同步轮通过同步带连接,所述轮轴的一端与第二同步轮连接,另一端穿过所述安装座的侧壁并与驱动轮毂连接。
11、优选的,所述第一传动装置还包括同步惰轮,所述同步惰轮设于所述同步带的一侧且与同步带接触,所述同步惰轮用于调节同步带的松紧度。
12、优选的,所述第二传动装置包括驱动轴和传动齿轮组;
13、所述传动齿轮组由若干依次传动连接的直齿轮组成,所述传动齿轮组的一端与驱动装置的输出轴连接,另一端与驱动轴连接,所述驱动轴上还连接有随驱动轴转动的驱动链轮。
14、优选的,所述驱动轮毂与所述驱动链轮的线速度相等。
15、优选的,还包括夹紧装置,所述夹紧装置用于夹持轨道;
16、所述夹紧装置包括支撑座、弹簧、滑座、滑块、导轨和随动器;
17、所述支撑座固定连接于安装座,所述滑座位于支撑座上方,所述支撑座和滑座间设有所述弹簧;
18、所述导轨设于安装座的内侧壁,所述滑块滑动套设于导轨上,所述滑块的顶部连接有所述滑座;
19、随动器插设于所述滑座上,且所述随动器位于驱动轮毂的正下方,所述随动器与驱动轮毂间设有留空部,所述留空部用于夹持轨道。
20、优选的,还包括导向装置,所述导向装置用于协助机器人转向;
21、所述导向装置包括轮架、轮轴和轮套;
22、所述轮架设于行驶装置的两侧,所述轮轴安装于轮架上,所述轮套安装于轮轴上,所述轮套的长度不小于轨道厚度的5倍,且所述行驶装置两侧的轮套之间的距离与轨道的宽度大小一致。
23、优选的,所述导向装置还包括深沟球轴承、第一防水盖和第二防水盖;
24、所述深沟球轴承设于轮套内且安装于轮轴上,所述第一防水盖卡接于所述轮套顶部与轮架之间,所述第二防水盖卡接于轮套底部与轮架之间。
25、本实用新型的贡献在于:行驶装置和爬坡装置的动力源均是同一组驱动装置,无需为行驶装置和爬坡装置分别配置驱动装置,使得本实用新型的一体机构重量减轻并节省了控制成本,通过行驶装置和爬坡装置分别控制机器人于水平轨道和倾斜轨道上运行,解决了机器人在爬坡时易发生打滑和溜坡的问题,通过在驱动轮毂上设置凸台,限制了包胶层的最大磨损厚度,避免了驱动链轮的节距延长,避免驱动链轮出现跳齿的情况,增加了巡检机器人爬坡时的可靠性。
技术特征:1.一种挂轨机器人行走爬坡一体机构,其特征在于,包括:
2.根据权利要求1所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述包胶层内设有与凸台相匹配的凹槽,所述包胶层通过所述凹槽与驱动轮毂连接。
3.根据权利要求2所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述凸台套设于所述凹槽内时,所述包胶层内任一直径上所述凸台的顶部或所述凹槽的槽底与包胶层外表面之间的距离不大于3mm。
4.根据权利要求1所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述第一传动装置包括第一同步轮、第二同步轮、同步带和轮轴;
5.根据权利要求4所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述第一传动装置还包括同步惰轮,所述同步惰轮设于所述同步带的一侧且与同步带接触,所述同步惰轮用于调节同步带的松紧度。
6.根据权利要求1所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述第二传动装置包括驱动轴和传动齿轮组;
7.根据权利要求1所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述驱动轮毂与所述驱动链轮的线速度相等。
8.根据权利要求1所述的一种挂轨机器人行走爬坡一体机构,其特征在于:还包括夹紧装置,所述夹紧装置用于夹持轨道;
9.据权利要求1所述的一种挂轨机器人行走爬坡一体机构,其特征在于:还包括导向装置,所述导向装置用于协助机器人转向;
10.据权利要求9所述的一种挂轨机器人行走爬坡一体机构,其特征在于:所述导向装置还包括深沟球轴承、第一防水盖和第二防水盖;
技术总结本技术涉及挂轨机器人领域,公开了一种挂轨机器人行走爬坡一体机构,包括:安装座及设于安装座内的驱动装置,所述驱动装置用于驱使机器人于轨道上运行;行驶装置,用于驱使机器人于水平轨道上运行;爬坡装置,用于驱使机器人于倾斜轨道上运行,行驶装置和爬坡装置的动力源均是同一组驱动装置,无需为行驶装置和爬坡装置分别配置驱动装置,使得本技术的一体机构重量减轻并节省了控制成本,通过行驶装置和爬坡装置分别控制机器人于水平轨道和倾斜轨道上运行,解决了机器人在爬坡时易发生打滑和溜坡的问题,通过在驱动轮毂上设置凸台,限制了包胶层的最大磨损厚度,避免驱动链轮出现跳齿的情况,增加了巡检机器人爬坡时的可靠性。技术研发人员:欧阳开一,刘志伟,王琳峰,邱文锋,王齐受保护的技术使用者:中科开创(广州)智能科技发展有限公司技术研发日:20231222技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/250177.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表