一种自动驾驶车辆的数据处理方法及系统与流程
- 国知局
- 2024-08-02 16:35:52
本发明涉及数据处理,特别是一种自动驾驶车辆的数据处理方法及系统。
背景技术:
1、自动驾驶技术的发展始于20世纪80年代,随着计算机视觉、机器学习、深度学习技术的进步及大数据的应用,这一技术领域在21世纪迎来了快速发展,自动驾驶车辆依靠各种传感器设备收集环境数据,再通过高级算法对这些数据进行处理,实现车辆的自主导航和驾驶,随着5g通信技术的普及,自动驾驶系统能够实现更高效的数据传输,为车辆间通信v2v、车辆与基础设施通信v2i提供技术支持,进而提升自动驾驶的安全性和效率。
2、尽管自动驾驶技术已取得显著进展,但现有技术在数据处理方法和系统方面仍存在不足的地方,对于动态变化的驾驶环境,现有的决策制定算法在应对复杂场景下的适应性和灵活性上仍有限,这限制自动驾驶车辆在多变环境中的应用。
技术实现思路
1、鉴于上述现有的一种自动驾驶车辆的数据处理方法及系统中存在的问题,提出了本发明。
2、因此,本发明所要解决的问题在于对于动态变化的驾驶环境,现有的决策制定算法在应对复杂场景下的适应性和灵活性上仍有限,这限制自动驾驶车辆在多变环境中的应用。
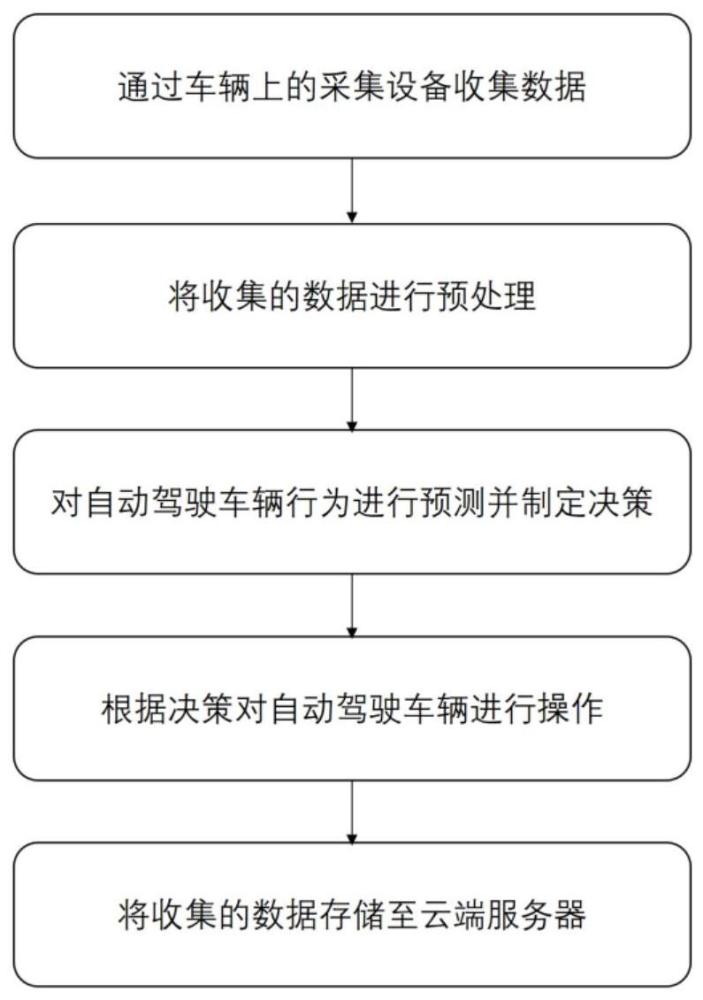
3、为解决上述技术问题,本发明提供如下技术方案:一种自动驾驶车辆的数据处理方法,其包括,通过车辆上的采集设备收集数据;将收集的数据进行预处理;对自动驾驶车辆行为进行预测并制定决策;根据决策对自动驾驶车辆进行操作;将收集的数据存储至云端服务器。
4、作为本发明所述自动驾驶车辆的数据处理方法的一种优选方案,其中:所述通过车辆上的采集设备收集数据指通过车辆上的摄像头、雷达、超声波传感器、gps和imu以及车载网络收集实时行为数据与历史行为数据,将采集设备收集的数据添加时间戳,所述摄像头收集道路标志、交通信号、行人、车辆、道路边界以及障碍物数据,雷达收集物体的距离、速度以及角度数据,所述超声波传感器收集近距离物体的位置数据,所述gps和imu收集车辆的位置、方向、速度以及加速度数据,所述车载网络收集车辆的状态信息数据。
5、作为本发明所述自动驾驶车辆的数据处理方法的一种优选方案,其中:所述将收集的数据进行预处理指根据时间戳对采集到的数据进行数据时间同步,使用滤波算法中值滤波去除其中的噪声和错误数据,将传感器采集的数据使用编程语言python进行数据格式转换为统一格式。
6、作为本发明所述自动驾驶车辆的数据处理方法的一种优选方案,其中:所述对自动驾驶车辆行为进行预测指基于当前状况构建自动驾驶车辆行为预测模型,预测模型公式为:
7、
8、其中p为预测的自动驾驶车辆行为值,t为预测时间范围,λ是时间衰减因子,v(t)是车辆速度函数,t是时间变量,ω是调整复杂信息过滤函数总和影响的系数,fi是复杂信息过滤函数,n是环境信息因素的总数,m为不同信息源的总数,βj为第j个信息源的权重,n为归一化因子,ξ是调整历史行为影响函数影响的系数,h为历史行为影响函数;
9、车辆速度函数公式为:
10、
11、其中vmax为车辆的最大速度,τ是时间常数,t为时间变量,ξ为正弦波动的幅度,ω为正弦波动的频率,o为正弦波的相位;
12、复杂信息过滤函数公式为:
13、
14、其中αi为第i个环境信息的权重,ki为调节环境信息函数影响的敏感度,ci为第i个环境信息的当前值,δi为第i个环境信息的阈值,ρi为调节周期性变化幅度的系数,vi为控制第i个环境信息周期性变化频率的参数,θi为第i个环境信息周期性变化的相位;
15、归一化函数公式为:
16、
17、其中ci,max为第i个环境信息的最大值;
18、历史行为影响函数公式为:
19、
20、其中m为历史行为的总数,σl为第l个历史行为的权重,hl为第1个历史行为的值,rl为调节第1个历史行的修正系数;
21、通过自动驾驶车辆行为预测模型,得出车辆预测值,对预测值与安全行为分类进行对比,当预测值p在0~0.3时,规定减速行为;当预测值p在0.3~0.7时,规定保持当前速度行为;当预测值p在0.7~1.0时,规定加速行为。
22、作为本发明所述自动驾驶车辆的数据处理方法的一种优选方案,其中:所述制定决策指基于预测出的自动驾驶车辆行为,利用决策制定算法计算得到行为决策值,决策制定算法公式为:
23、
24、其中d为决策值,d为行为预测的数量,pi为第i个决策的结果,wi为第i个决策的权重,a为调整预测结果影响的指数系数,φ(ci,t)为第i个决策在时间t的环境影响函数,s为环境信息的数量,xi为环境信息的调整系数,p为历史行为的数量,sl是历史行为的权重,σ′为调整系数;
25、环境影响函数公式为:
26、
27、其中q为常数,tμ为时间t的影响,μ是负常数值,v为环境信息ci的影响系数;
28、利用决策制定算法计算得到行为决策值d,最大值为最优策略,通过迭代得到行为决策值d最大值,将计算行为决策值d最大值的数据参数输出得出最优参数,将最优参数定为最优策略。
29、作为本发明所述自动驾驶车辆的数据处理方法的一种优选方案,其中:所述根据决策对自动驾驶车辆进行操作指将通过行为决策值d制定的策略转化为控制命令,通过自动驾驶车辆中的电子控制单元控制发动机、制动系统、转向系统执行命令,在操作执行过程中,车辆通过摄像头和超声波传感器监测周围环境和车辆状态,包括速度、加速度、车辆位置以及其他车辆的距离信息。
30、作为本发明所述自动驾驶车辆的数据处理方法的一种优选方案,其中:所述将收集的数据存储至云端服务器指将感知数据、车辆状态信息、预处理后的数据、传感器标定信息、滤波后的数据、构建预测模型的所有参数和历史数据、行为的预测值p、决策值d以及执行决策过程中收集的实时监控数据存储在云端服务器中。
31、本发明的另外一个目的是提供出租车计价器里程校对系统,其中包括,获取模块、处理模块、制定模块、执行模块以及存储模块;
32、所述获取模块用于收集车辆上传感器以及车载网络和车辆状态的数据;
33、所述处理模块用于对收集的数据进行预处理;
34、所述制定模块用于构建并运行自动驾驶车辆的行为预测模型,进行制定具体的决策;
35、所述执行模块用于将最优行为决策转化为实际的车辆控制命令,并通过车辆的电子控制单元执行;
36、所述存储模块用于存储实时收集与处理的数据、预测结果以及最终的行为决策数据。
37、一种计算机设备,包括:存储器和处理器;所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述自动驾驶车辆的数据处理方法的步骤。
38、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述自动驾驶车辆的数据处理方法的步骤。
39、本发明有益效果为:通过利用车辆上的多种传感器收集数据,构建了自动驾驶车辆行为预测模型和决策制定算法,实现对车辆未来行为的精确预测和最优决策自动制定,对车辆未来可能的行为进行精确预测,并制定最优的行为决策,提高行驶效率和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251471.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表