一种基于道路障碍物高度的碰撞预警系统的制作方法
- 国知局
- 2024-08-02 16:40:08
本技术涉及汽车控制系统,具体而言,涉及一种基于道路障碍物高度的碰撞预警系统。
背景技术:
1、汽车碰撞预警系统(collision warning system)是一种安全技术,旨在帮助驾驶员识别潜在的碰撞风险并采取适当的措施来避免碰撞,该系统利用传感器和其他相关技术来监测车辆周围的环境,并提供及时的警示和警告。
2、在现有技术中,碰撞预警系统当出现误报或漏报的问题,可能会导致驾驶员对警报的过度依赖或忽略真正的危险情况。并且,对于基于传感器的碰撞预警系统,高速行驶情况下的实时数据处理和决策是一个挑战,系统需要在短时间内对大量的传感器数据进行处理和分析,并做出准确的决策。
3、因此,急需一种基于道路障碍物高度的碰撞预警系统以解决现有技术中难以在高速行驶中实时的进行数据处理,并且会导致驾驶员对警报的过度依赖的技术问题。
技术实现思路
1、鉴于此,本实用新型提出了一种基于道路障碍物高度的碰撞预警系统,旨在解决现有技术中难以在高速行驶中实时的进行数据处理,并且会导致驾驶员对警报的过度依赖的技术问题。
2、本实用新型提供了一种基于道路障碍物高度的碰撞预警系统,包括:
3、传感器模块,分布在车体外部,所述传感器模块用于感知车体周围的环境,获取所述车体附近障碍物信息;
4、障碍物识别模块,与所述传感器模块无线连接,所述障碍物识别模块用于对所述传感器模块获取的所述障碍物信息进行处理和分析;
5、高度测量模块,与所述障碍物识别模块电连接,所述高度测量模块用于对所述障碍物的高度信息进行的准确测量,得出所述障碍物与所述车体之间的关系;
6、预警终端,与所述高度测量模块电连接,根据所述障碍物与所述车体之间的关系判断是否存在碰撞风险,并向驾驶员发出碰撞预警信号。
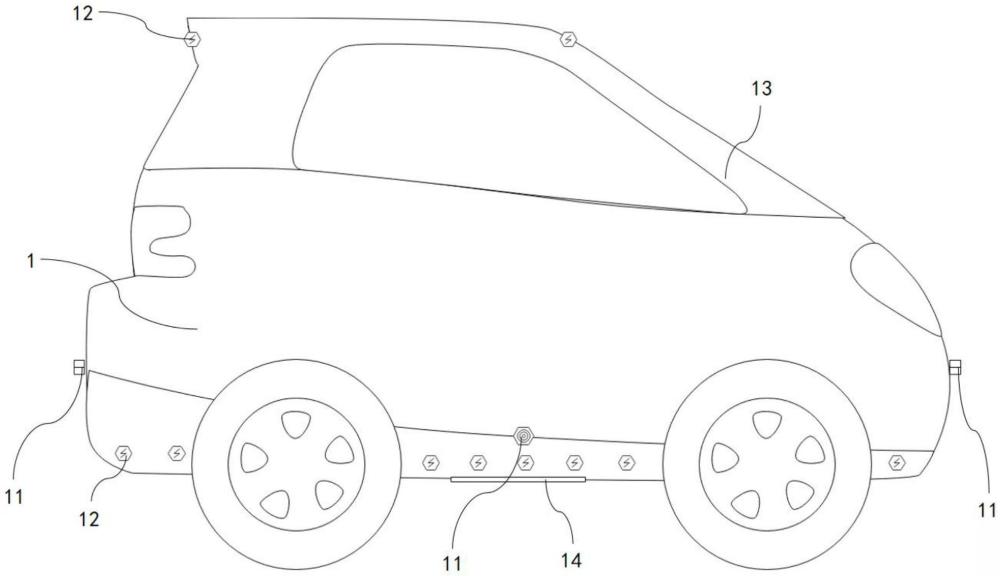
7、优选的,所述传感器模块包括摄像头和激光雷达。
8、优选的,所述激光雷达设置有多个,所述激光雷达均匀的分布在所述车体的底盘的四周以及所述车体的顶部的前方和后方。
9、优选的,所述摄像头设置有四个,分别设置在所述车体中部的前方、后方及两侧。
10、优选的,所述障碍物识别模块预设有距离识别单元,所述距离识别单元与所述激光雷达无线连接;
11、所述距离识别单元用于通过分析所述激光雷达发射激光束并测量激光束从障碍物反射回来的时间计算所述车体与所述障碍物之间的距离,所述障碍物识别模块还预设有根据汽车的实时速度设置的警报距离l,所述警报距离l的计算公式为:
12、l=a×s
13、其中,l表示警报距离,a表示汽车运行的速度,s表示该运行的速度正常人的有效反应时间。
14、优选的,所述障碍物识别模块预设有形状识别单元和材质分析单元,所述形状识别单元和材质分析单元均与所述摄像头无线连接;
15、所述形状识别单元用于当所述车体与所述障碍物之间的距离间隔为l时,获取所述摄像头的图像信息,并通过图像处理算法来分析所述障碍物的轮廓;
16、所述材质分析单元用于当所述车体与所述障碍物之间的距离间隔为l时,获取所述摄像头的图像信息,并通过图像处理算法来分析透光性。
17、优选的,所述高度测量模块预设有通过性单元,所述通过性单元与所述障碍物识别模块电连接,所述通过性单元用于准确测量所述障碍物整个轮廓的最大高度,所述通过性单元,所述通过性单元还预设有根据所述车体底盘高度预设的安全阈值,所述通过性单元并列的比对所述安全阈值与所述障碍物的最大轮廓。
18、优选的,所述预警终端与所述高度测量模块和障碍物识别模块设置同一级别的电连接,所述预警终端预设有警报单元,所述警报单元设置有第一框架、第二框架和第三框架,所述第一框架内设置有免除阈值,所述第二框架设置有提醒阈值,所述第三框架设置有介入阈值,
19、当所述警报单元获取所述安全阈值与所述障碍物的最大轮廓的比对结果,根据所述比对结果根据其与免除阈值和介入阈值的关系,自动输入所述第一框架和第二框架;
20、针对所述第二框架的数据,当所述警报单元获取所述通过图像处理算法来分析透光性结果,根据所述比对结果自动输入所述第三框架,并与介入阈值进行比对。
21、优选的,还包括:
22、抬头显示器,设置在所述车体的挡风玻璃上;
23、刹车控制模块,设置在所述车体的底盘。
24、优选的,所述预警终端通过所述第二框架与所述抬头显示器电连接,所述预警终端还通过所述第三框架与所述刹车控制模块电连接;
25、当所述警报单元输入所述第一框架时,所述障碍物高度可以平稳通过,所述预警终端对所述抬头显示器电连接发出一个保持方向的警告,用于避免车胎碰撞所述障碍物;
26、当所述警报单元输入所述第二框架时,所述障碍物高度需要避让,所述预警终端对所述抬头显示器电连接发出一个进行避让的警告,用于避免车体碰撞或剐蹭所述障碍物;
27、当所述警报单元输入所述第三框架时,验证所述障碍物的尺寸不容通过,并且障碍物密度大,硬度高,获取所述车体的运行速度,根据运行速度对所述刹车控制模块发出一个刹车信号。
28、与现有技术相比,本实用新型的有益效果在于:
29、障碍物识别模块接收传感器模块传输的障碍物数据,并进行处理和分析。通过算法和模式识别技术,可以提取出障碍物的高度信息,从而更准确地了解障碍物与车体的相对位置和距离;高度测量模块与障碍物识别模块连接,用于对障碍物的高度信息进行准确测量,通过测量障碍物与车体之间的高度关系,可以判断是否存在碰撞风险;预警终端与高度测量模块连接,根据障碍物与车体之间的关系判断是否存在碰撞风险,如果存在碰撞风险,预警终端将向驾驶员发出碰撞预警信号;实现了对车体周围环境的感知和车体与障碍物之间关系的判断,从而提供及时的碰撞预警,帮助驾驶员避免潜在的碰撞风险。
30、并且,本申请的预警终端可以对抬头显示器电连接发出一个进行避让的警告,可以使得驾驶员结合实际情况进行行车判断。
技术特征:1.一种基于道路障碍物高度的碰撞预警系统,其特征在于,包括:
2.根据权利要求1所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述传感器模块包括摄像头和激光雷达。
3.根据权利要求2所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述激光雷达设置有多个,所述激光雷达均匀的分布在所述车体的底盘的四周以及所述车体的顶部的前方和后方。
4.根据权利要求3所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述摄像头设置有四个,分别设置在所述车体中部的前方、后方及两侧。
5.根据权利要求4所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述障碍物识别模块预设有距离识别单元,所述距离识别单元与所述激光雷达无线连接;
6.根据权利要求5所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述障碍物识别模块预设有形状识别单元和材质分析单元,所述形状识别单元和材质分析单元均与所述摄像头无线连接。
7.根据权利要求6所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述高度测量模块预设有通过性单元,所述通过性单元与所述障碍物识别模块电连接。
8.根据权利要求7所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述预警终端与所述高度测量模块和障碍物识别模块设置同一级别的电连接,所述预警终端预设有警报单元,所述警报单元设置有第一框架、第二框架和第三框架。
9.根据权利要求8所述的基于道路障碍物高度的碰撞预警系统,其特征在于,还包括:
10.根据权利要求9所述的基于道路障碍物高度的碰撞预警系统,其特征在于,所述预警终端通过所述第二框架与所述抬头显示器电连接,所述预警终端还通过所述第三框架与所述刹车控制模块电连接。
技术总结本技术提出了一种基于道路障碍物高度的碰撞预警系统,涉及汽车控制系统技术领域,包括:传感器模块,分布在车体外部,传感器模块用于感知车体周围的环境,获取车体附近障碍物信息,还设置有障碍物识别模块和高度测量模块,高度测量模块用于对障碍物的高度信息进行的准确测量,得出障碍物与车体之间的关系;预警终端,与高度测量模块电连接,根据障碍物与车体之间的关系判断是否存在碰撞风险,并向驾驶员发出碰撞预警信号。本技术可以实现对车体周围环境的感知和车体与障碍物之间关系的判断,从而提供及时的碰撞预警,帮助驾驶员避免潜在的碰撞风险。技术研发人员:吴泽安,陈睿,任仲彬,齐飞受保护的技术使用者:北京安利华汽车有限公司技术研发日:20231226技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/251871.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表