一种线控底盘系统ABS制动舒适性动态控制方法与流程
- 国知局
- 2024-08-02 17:03:49
本发明涉及线控底盘控制系统,特别涉及一种线控底盘系统abs制动舒适性动态控制方法。
背景技术:
1、随着对车辆底盘智能化,集成化的要求越来越高,线控底盘的发展成为业界共识,其中电子机械制动系统(emb)正在成为线控制动系统发展的主流。电子机械制动系统是制动执行机构和驾驶员踏板解耦的线控装置,通过电机驱动传动机构从而推动制动器上的摩擦片贴紧制动盘以产生足够的制动力,从而得到期望的制动扭矩,每个车轮上都将安装一个独立的电子机械制动器,线控底盘控制器集成控制四个电子机械制动器以实现制动功能。
2、此外,跨域融合,如线控制动融合线控转向可以极大的提升底盘系统主动干预的舒适性,同时还可扩展车辆的操控边界。线控转向是方向盘和转向机构机械解耦的转向线控装置。通过方向盘执行器来输入驾驶员转向请求,同时反馈转向力。前轮执行器以及后轮执行器执行驾驶员的转向请求。
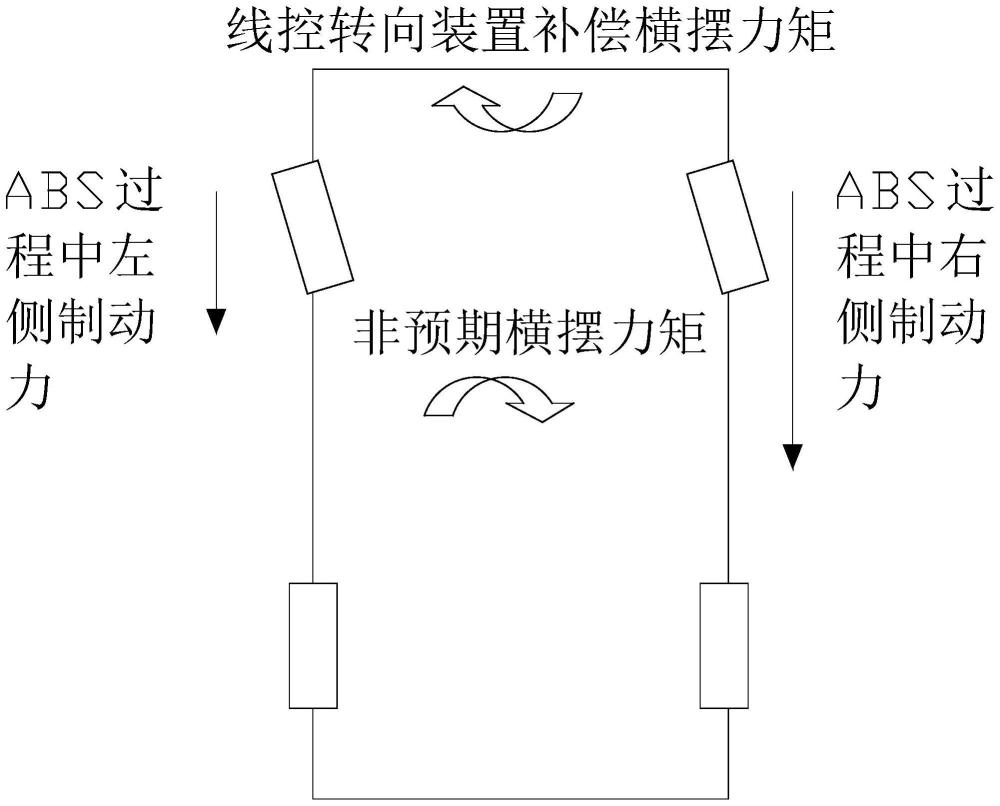
3、abs控制方法在业界已经非常成熟,主流的有门限值控制和滑移率控制两种方式。门限值控制通过设定滑移率和轮加速度的上下门限来将极限制动时的车轮滑移率控制在一个安全的范围内。滑移率控制则通过设定滑移率目标,用p id控制器来动态调整四个车轮的摩擦片的压力(夹紧力)使的四个车轮的滑移率处在目标滑移率附件上下波动。然而无论采用哪种控制方法,由于路面的扰动,外部环境的干扰,甚至本身abs控制逻辑的原因,都会导致产生非预期的横摆力矩并影响abs制动时的舒适性,因此,本申请研制了舒适性动态控制方法,以解决现有技术中存在的问题。
技术实现思路
1、本发明目的是:提供一种线控底盘系统abs制动舒适性动态控制方法,以解决现有技术中abs制动时非预期的横摆力导致的驾驶舒适性的问题。
2、本发明的技术方案是:一种线控底盘系统abs制动舒适性动态控制方法,包括:
3、abs制动时,线控底盘控制器发送给四个车轮的夹紧力控制信号,通过前馈控制模块获得夹紧力值,并计算出左侧车轮的制动力和右侧的制动力;
4、根据所述制动力计算非预期横摆力矩及非预期的补偿横摆力矩,进而计算出所需的前馈补偿转角;
5、通过后馈控制模块获得实际横摆角速度和驾驶员期望横摆角速度,并计算实际横摆力矩偏差量;根据所述实际横摆力矩偏差量计算出实际反馈补偿转角;
6、根据所述前馈补偿转角与反馈补偿转角的和,获得干预转角,并通过线控转向装置进行横摆力矩的转向补偿。
7、优选的,所述制动力的计算方法为:
8、首先计算驾驶员的制动力请求:
9、
10、
11、其次根据路面提供制动力与路面附着系数和滑移率的函数可计算出路面可提供的制动力为:
12、fxr_road=f(λr,μr);
13、fxl_road=f(λl,μl);
14、进入abs控制后,车轮会测量到滑移率,接近附着极限,而实际制动力不能超过路面提供的制动力,因此路面实际提供的制动力大小为:
15、
16、
17、其中,fxl为左侧制动力;fxr为右侧制动力;fxl_driver为驾驶员预期制动力的左侧车轮值;fxr_driver为驾驶员预期制动力的右侧车轮值;fxr_road为路面可提供制动力的右侧车轮值;fxl_road为路面可提供制动力的左侧车轮值;fl1为左侧前轮夹紧力;fl2为左侧后轮夹紧力;fr1为右侧前轮夹紧力;fr2为右侧后轮夹紧力;μ是盘片摩擦系数;r是制动盘有效半径;r是轮胎的滚动半径;λr为右侧车轮滑移率;λl为左侧车轮滑移率;μr右侧车轮与路面的附着系数;μl为左侧车轮与路面的附着系数。
18、优选的,所述非预期横摆力矩为:
19、mcompensation=munintended=fxl*wheelbase/2-fxr*wheelbase/2;
20、其中,wheelbase为车身纵向方向的轮距;munintended为非预期横摆力矩;mcompensation为非预期补偿横摆力矩。
21、优选的,所述前馈补偿转角δ′为:
22、δ′=f-1(munintended)。
23、优选的,所述实际横摆力矩偏差量merror为:
24、
25、其中,为驾驶员期望横摆角速度;为实际横摆角速度;jvehicle为车辆的惯性矩阵。
26、优选的,所述反馈补偿转角δ″为:
27、δ″=f-1(merror)。
28、所述干预转角δ为:
29、δ=δ′+δ″;
30、所述线控转向装置根据干预转角δ的值,进行转向干预补偿。
31、优选的,所述abs制动设置有门限值mthd,当所述实际横摆力矩偏差量大于门限值时,通过线控转向装置进行转向调整使其小于门限值。
32、一种线控底盘abs制动系统,包括线控底盘控制器、电子机械制动系统、线控转向装置及横摆角速度传感器;
33、所述线控底盘控制器包括横摆力矩修正使能模块,前馈控制模块和后馈控制模块;
34、所述电子机械制动系统包括左前轮电子机械制动器、左后轮电子机械制动器、右前轮电子机械制动器、右后轮电子机械制动器;
35、所述线控转向装置包括方向盘执行器和前轮执行器。
36、与现有技术相比,本发明的优点是:
37、(1)能够极大程度的减小abs制动过程中由于左右车轮目标夹紧力不一致而产生的非预期车身横摆,保证abs车辆制动一致性,改善线控底盘系统的舒适性,提高驾驶员的驾驶信心。
技术特征:1.一种线控底盘系统abs制动舒适性动态控制方法,其特征在于,包括:
2.根据权利要求1所述的一种线控底盘系统abs制动舒适性动态控制方法,其特征在于:所述制动力的计算方法为:
3.根据权利要求2所述的一种线控底盘系统abs制动舒适性动态控制方法,其特征在于:所述非预期横摆力矩为:
4.根据权利要求3所述的一种线控底盘系统abs制动舒适性动态控制方法,其特征在于:所述前馈补偿转角δ′为:
5.根据权利要求4所述的一种线控底盘系统abs制动舒适性动态控制方法,其特征在于:所述实际横摆力矩偏差量merror为:
6.根据权利要求5所述的一种线控底盘系统abs制动舒适性动态控制方法,其特征在于:所述反馈补偿转角δ″为:
7.根据权利要求4所述的一种线控底盘系统abs制动舒适性动态控制方法,其特征在于:所述abs制动设置有门限值mthd,当所述实际横摆力矩偏差量大于门限值时,通过线控转向装置进行转向调整使其小于门限值。
8.一种线控底盘abs制动系统,其特征在于:包括线控底盘控制器、电子机械制动系统、线控转向装置及横摆角速度传感器;
技术总结本发明涉及线控底盘控制系统领域,具体为一种线控底盘系统ABS制动舒适性动态控制方法,包括:ABS制动时,通过前馈控制模块获得夹紧力值,并计算出左侧车轮的制动力和右侧的制动力;根据所述制动力计算非预期横摆力矩,进而计算出所需的前馈补偿转角;通过后馈控制模块获得实际横摆角速度和驾驶员期望横摆角速度,并计算实际横摆力矩偏差量;根据所述实际横摆力矩偏差量计算出实际反馈补偿转角;根据所述前馈补偿转角与反馈补偿转角的和,获得干预转角,并通过线控转向装置进行横摆力矩的转向补偿。能够极大程度的减小ABS制动过程中由于左右车轮目标夹紧力不一致而产生的非预期车身横摆,改善线控底盘系统的舒适性,提高驾驶员的驾驶信心。技术研发人员:苏立夫,苏慧杰受保护的技术使用者:苏州坐标系智能科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/253812.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表