一种控制力矩陀螺群机动中穿越奇异的方法与流程
- 国知局
- 2024-08-01 05:24:25
本发明涉及卫星姿态控制,尤其涉及一种控制力矩陀螺群机动中穿越奇异的方法。
背景技术:
1、随着空间技术的发展,为了满足复杂卫星控制系统高精度高稳定度和大角度姿态快速机动的要求,一般采用控制力矩陀螺群作为执行机构。由于控制力矩陀螺群存在构型奇异,需要对奇异问题进行规避,当控制力矩陀螺群框架构型“锁死”时会导致执行机构无法输出期望的力矩,使系统失去控制能力进而影响机动能力,甚至造成姿态异常影响载荷成像。
2、这里的陈述仅提供与本发明有关的背景技术,而并不必然地构成现有技术。
技术实现思路
1、本发明的目的在于提供一种控制力矩陀螺群机动中穿越奇异的方法,当机动过程中出现了无法避免的奇异现象时,可以通过设计的外框角速度指令来实现迅速穿越奇异,恢复系统正常的控制能力。
2、为了达到上述目的,本发明提供一种控制力矩陀螺群机动中穿越奇异的方法,包含以下步骤:
3、步骤s1、卫星用控制力矩陀螺群作为执行机构进行姿态快速机动;
4、步骤s2、根据机动过程中的控制率计算相应的控制指令力矩和奇异度;
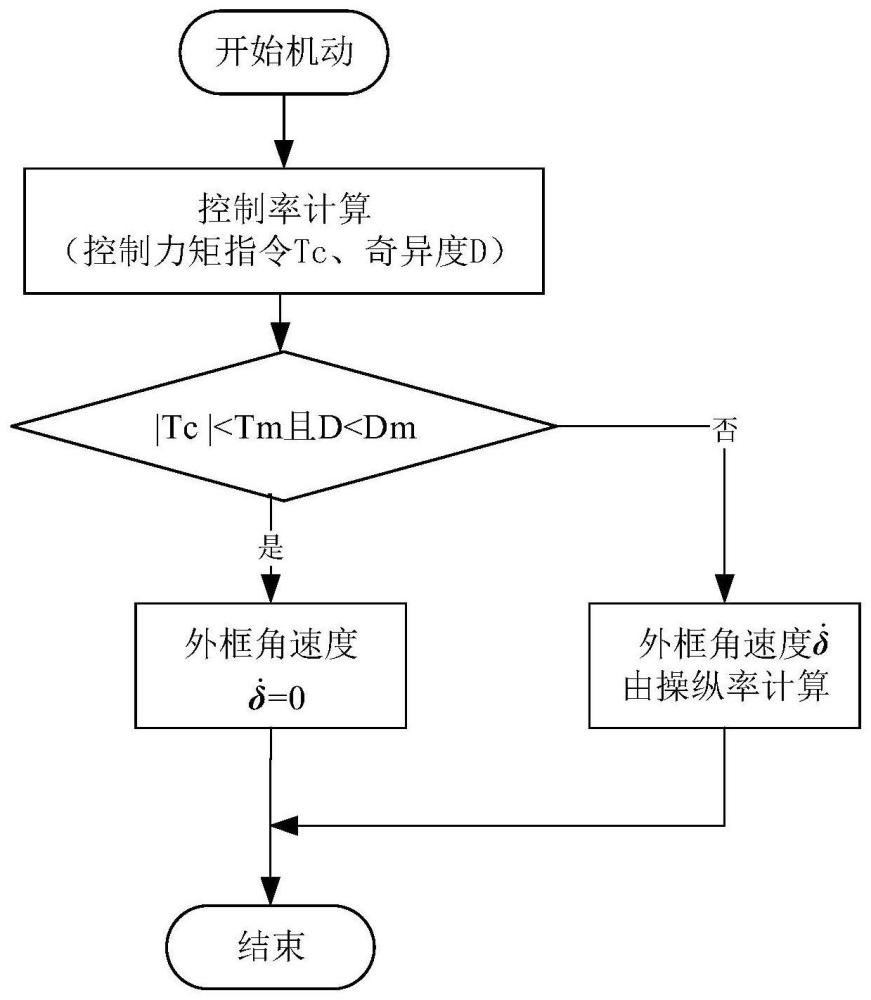
5、步骤s3、根据设定的判据条件自动切换解算控制力矩陀螺的外框架角速度指令,快速穿越奇异。
6、所述步骤s2包含:
7、步骤s2.1、采用四元数和姿态角速度反馈的改进型递阶饱和控制算法计算控制力矩指令tc;
8、姿态四元数偏差为:
9、
10、角速度偏差为:
11、ωe=ωbo-abdωd
12、式中,qbo为星体姿态四元数,ωbo为惯性角速度;
13、采用四元数和姿态角速度反馈的改进型递阶饱和控制算法:
14、
15、
16、
17、式中,qev为姿态四元数误差qe的矢量部分,ωe为姿态角速度误差在控制基准坐标系下的表示,表示积分项达到限幅值0.01nm后积分值不再累加,达到限幅值-0.01nm后积分值不再减小;
18、k、d、ki的计算方法如下:
19、kx=2ωnx2ix,ky=2ωny2iy,ky=2ωny2iy
20、dx=2ξxωnxix,dy=2ξyωnyiy,dz=2ξzωnziz
21、ki=γk
22、加入前馈力矩:
23、tq=ωbo×aboωo+ωbd×abdωd-abdad+ωe×abmωmd-abmamd-ωbi×(iωbi+hb)
24、其中,×表示叉乘,amd为导引角加速度,ωo=[0 -ω0 0]t,ω0为实时计算的轨道角速度;
25、则控制力矩为:
26、tc=t′c+tq
27、步骤s2.2、采用控制力矩陀螺运动方程,根据框架角运动的雅克比矩阵计算奇异度d;
28、雅克比矩阵:
29、c=(a*cδ-b*sδ)ecmg
30、其中,ecmg=diag(n1 n2 n3 n4 n5)/6000,控制力矩陀螺内转子转速为:n1,n2,n3,n4,n5;
31、奇异度表示如下:
32、d=det(cct)
33、其中,det(.)表示对括号里的矩阵求行列式。
34、判据条件中的力矩阈值和奇异度判定阈值可注数修改。
35、所述步骤s3包含:
36、步骤s3.1、机动过程中,当满足条件|tc|<0.5nm且d<0.1时,置外框角速度
37、步骤s3.2、机动过程中,当不满足条件|tc|<0.5nm且d<0.1时,根据操纵率计算外框角速度;
38、框架角速度鲁棒伪逆解为:
39、
40、其中,e是3×3的单位阵,h=10,r=e-10·d;
41、采用零运动操纵率计算如下:
42、
43、其中,矩阵cct的元素为em,k,e'm,k,i为矩阵的元素;
44、
45、其中,ai、bi为矩阵a、b的第i列;i=1,2,3,4,5。
46、
47、则零运动框架角速度为:
48、
49、限幅处理如下:
50、记如果(默认值2°/s,可注数修改),则不做任何处理,否则,
51、得出控制力矩陀螺的框架角速度指令:
52、
53、本发明具有以下优点:
54、1、本发明在零运动奇异规避的基础上,通过判据逻辑切换,能根据指令力矩和奇异度自主选择进行外框架角速度指令的计算,能有效保证卫星快速穿越奇异。
55、2、本发明方法设计的判据条件中力矩阈值和奇异度判定阈值可注数修改,设计灵活,工程应用简单。
技术特征:1.一种控制力矩陀螺群机动中穿越奇异的方法,其特征在于,包含以下步骤:
2.步骤s3、根据设定的判据条件自动切换解算控制力矩陀螺的外框架角速度指令,快速穿越奇异。如权利要求1所述的控制力矩陀螺群机动中穿越奇异的方法,其特征在于,所述步骤s2包含:
3.如权利要求2所述的控制力矩陀螺群机动中穿越奇异的方法,其特征在于,判据条件中的力矩阈值和奇异度判定阈值可注数修改。
4.如权利要求3所述的控制力矩陀螺群机动中穿越奇异的方法,其特征在于,所述步骤s3包含:
技术总结一种控制力矩陀螺群机动中穿越奇异的方法,首先根据机动过程中控制力矩陀螺群的控制率计算出相应的控制指令力矩和奇异度,然后根据设定的判据条件得到控制力矩陀螺外框架角速度,快速穿越奇异,恢复系统正常的控制能力。本发明解决了控制力矩群控制过程中框架构型“锁死”问题,有效避免了系统因奇异失去控制能力使得卫星机动任务受到影响甚至造成姿态异常的现象,实现了控制力矩陀螺机动过程中快速穿越奇异。技术研发人员:钟金凤,裴甲瑞,刘德庆,吴敬玉,陈撼,陈秀梅,张增安,郭思岩,胡文坤,石晓涵,张超受保护的技术使用者:上海航天控制技术研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219578.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表