微小型高速共轴式复合飞行器及其控制方法
- 国知局
- 2024-08-01 05:25:01
本发明涉及飞行器设计,具体是一种微小型高速共轴式复合飞行器及其控制方法。
背景技术:
1、
2、按照飞行器构型分类,常见的微小型无人飞行器可分为固定翼飞行器、单旋翼直升机、多旋翼飞行器三种。除此之外,有些飞行器由这三种飞行器复合而成,被称为复合式飞行器。
3、倾转复合式飞行器可兼顾固定翼飞行器和多旋翼飞行器的优势,通过旋翼相对于机身的倾转运动,可实现旋翼飞行器的垂直起降与固定翼飞行器的高速巡航。倾转复合式飞行器解决了固定翼飞行器起降场地要求高以及旋翼飞行器前飞效率低的问题,相比于传统构型无人机具有可高速巡航、可垂直起降的优点,具有诸多任务场景。
4、由于微小型倾转飞行器具有尺寸小、质量轻、系统集成度高的特点,其内部空间受限,机身结构设计、各零部件与机载系统设计难度较大。因此,需设计一种合理的结构,在有限的空间内满足机身强度要求以及动力学要求。
5、采用倾转旋翼机构的飞行器由于存在各通道相互耦合、旋翼与机翼气动干扰复杂等众多原因,导致过度模式的控制难度较大,飞行品质低等问题。
6、微小型飞行器尺寸越小、质量越轻,其抗风能力越弱,从而在有风情况易出现飞行不稳定。无人机的低雷诺数、非线性、非定常的空气动力学特性给飞行控制带来很大的障碍。因此,无人机的模型参数、整体外形、控制方法的设计需要反复协调。
技术实现思路
1、本发明为了解决现有技术的问题,提供了一种微小型高速共轴式复合飞行器及其控制方法,通过采用共轴双旋翼及倾转双旋翼的复合式结构,使其具备旋翼飞行器和固定翼飞行器的优点,同时避免了升力的浪费和旋翼间的气动干扰,提高了无人机的飞行效率和适用性。
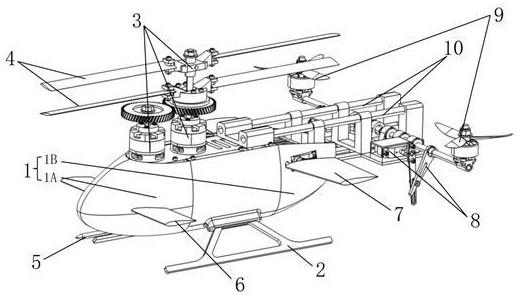
2、本发明提供了一种微小型高速共轴式复合飞行器,包括机身,机身顶部安装有共轴电机旋翼组,底部安装有起落架,所述共轴电机旋翼组包括共轴电机系统和共轴双旋翼;所述机身前部安装有前置增升短翼,机身两侧安装有全动舵面,机身后侧通过倾转传动系统安装有倾转双旋翼组。
3、所述机身包括流线型机身外壳,机身外壳内部设有固定连接的上层碳纤维板、中层碳纤维板、下层碳纤维板;所述上层碳纤维板前部安装有共轴电机系统,后部安装有机身碳纤维管固定底座,机身碳纤维管固定底座固定有与中层碳纤维板连接的机身碳纤维连接管;所述中层碳纤维板前方固定有飞控计算机,侧方固定有全动舵面,后部固定有倾转传动系统;下层碳纤维板底部固定有起落架和空速管,下层碳纤维板上方安装有电池。所述机身外壳包括前整流罩、后整流罩及由前、后整流罩包裹围成的半密封载荷舱。
4、所述全动舵面包括全动舵面转轴、舵面转轴轴承、舵面转轴轴承固定底座、全动舵面舵机固定底座、全动舵面舵机、全动舵面舵机摇臂;舵面转轴轴承固定底座安装于中层碳纤维板之上,底座内设有法兰轴承,全动舵面转轴一端与法兰轴承滚动体相连接并通过法兰轴承滚动体实现自由转动,全动舵面转轴另一端与全动舵面固定,全动舵面绕,全动舵面转轴自由转动;全动舵面舵机固定底座位于舵面转轴轴承固定底座后部,与中层碳纤维板固定,内部设有全动舵面舵机;舵机输出轴与舵机摇臂相连,舵机摇臂与舵面连接。
5、所述倾转传动系统包括倾转舵机固定底座、倾转轴固定底座、倾转舵机、倾转舵机摇臂、传动摇臂、倾转轴;倾转舵机固定底座安装于碳纤维板后部两侧,内部设有倾转舵机;倾转舵机输出轴安装有舵机摇臂,倾转电机固定底座后侧设有倾转轴固定底座,倾转轴承安装于底座内,倾转轴一侧与法兰轴承滚动体相连接并通过兰轴承滚动体相自由转动,倾转轴另一端安装有倾转电机底座,倾转电机与倾转双旋翼通过倾转电机螺帽固定安装于倾转电机底座之上;倾转轴中部固定有传动摇臂,其与舵机摇臂通过螺栓连接;倾转系统工作时,由舵机接受飞行计算机信号后,带动倾转摇臂及传动摇臂分别绕舵机输出轴及倾转轴转动,从而使倾转电机与倾转双旋翼向前倾转。
6、所述共轴电机系统包括前置电机、后置电机、前置电机轴、前置传动齿轮、前置电机螺帽、后置电机轴、后置传动齿轮、后置电机螺帽、下旋翼桨毂、上旋翼桨毂和轴套,共轴电机系统工作时,前置电机带动前置传动齿轮顺时针旋转;前置传动齿轮通过与后置传动齿轮啮合,带动后置传动齿轮绕后置电机轴逆时针旋转,由于后置传动齿轮与轴通过齿轮轴承连接,后置传动齿轮自由转动;后置传动齿轮带动下旋翼桨毂逆时针转动,桨毂再带动下旋翼逆时针转动。
7、所述后置电机固定于上层碳纤维板,后置电机轴与其固定连接;后置电机轴下部设有齿轮轴承底座,底座之上安放齿轮轴承,轴承上方设有卡簧将其固定,轴承与后置传动齿轮固定连接;齿轮与位于后置电机轴中部的下旋翼桨毂固定连接,使后置传动齿轮带动下旋翼桨毂转动。
8、所述前置电机固定于上层碳纤维板前部,前置电机轴与其固定连接;电机轴上侧设有前置传动齿轮,齿轮上侧和下侧分别通过前置电机螺帽以及轴套固定。
9、所述前置传动齿轮与后置传动齿轮相啮合,两者齿轮比为1:1;后置电机轴上部设有上旋翼桨毂,其上下侧由轴套固定;上旋翼桨毂与后置电机轴相紧固,上旋翼、下旋翼与上旋翼桨毂、下旋翼桨毂分别固定,桨毂带动旋翼转动。
10、进一步地,所述机身总长为约为0.3m,宽度约为0.1m(不含桨叶、各翼面及倾转双旋翼组);采用流线型外形设计,以减少高速前飞时阻力并提高飞行稳定性。
11、进一步地,所述机身顶部共轴双旋翼旋转方向相反,以平衡反扭矩并通过上、下旋翼的转速差实现偏航控制。
12、进一步地,机身底部前侧插孔安装有空速管,空速管与机身内部空速计通过硅胶管连接。
13、进一步地,所述起落架采用滑橇式起落架,不可收放。
14、进一步地,倾转旋翼在前飞模式下的倾转角度固定为60°。
15、进一步地,为增加结构刚度和强度,减少倾转旋翼旋转带来的结构振动,机身前、后部分通过碳纤维管以及碳纤维板连接。
16、进一步地,所属机身内部固定安装有飞控计算机,空速计、共轴电机系统、全动舵面传动系统、倾转电机传动系统以及倾转双旋翼组均通过飞控计算机与电池电性连接。
17、本发明还提供了一种微小型高速共轴式复合飞行器的控制方法,包括可垂直起降的旋翼模式、过渡模式和前飞模式;
18、当飞行器处于可垂直起降的旋翼模式时,倾转机构不发生任何偏转,此时升力全部由四个旋翼提供,用于克服整机重力。通过改变各个旋翼的转速进而改变旋翼升力的大小来控制飞行器的姿态和运动方向;在悬停状态下,上旋翼与下旋翼转动方向相反。且由于共轴双旋翼间存在的气动干扰,下旋翼转速需略高于上旋翼转速以保证旋翼产生的反扭矩可相互抵消;左倾转旋翼与右倾转旋翼转速相同、转向相反,抵消反扭矩,使飞行器发生滚转。
19、当飞行器处于过渡模式时,倾转双旋翼逐渐产生向前的偏转运动,且双旋翼同时同步倾转。此时飞行器的姿态保持水平,但由于双旋翼的倾转,产生向前的分力,使飞行器开始向前飞行;由于过渡模式状态下。飞行器的控制存在耦合现象,需结合倾转双旋翼倾转角度及飞行空速对飞行器状态进行评估,对旋翼模式及前飞模式的控制进行分配,使飞行器从旋翼模式平稳过渡到前飞模式。
20、当飞行器处于前飞模式时,倾转双旋翼向前倾转60°并保持相对恒定,即倾转旋翼产生力与机身水平面呈30°夹角;此时共轴双旋翼产生合力与倾转双旋翼产生的向上分力仍保持平衡,避免飞行器产生多余的俯仰运动。前置增升短翼产生部分升力,为主要产生升力的共轴双旋翼卸载,从而避免共轴双旋翼表面气流速度过快,增加桨叶负担。当飞行器处于前飞模式时,主要通过全动舵面的偏转改变飞行器的姿态和运动方向。当飞行器处于前飞模式时, 飞行器的滚转运动通过改变左、右全动舵面的偏转角度实现。当飞行器处于前飞模式时, 飞行器的偏航运动通过改变共轴双旋翼的转速差,从而改变共轴双旋翼产生的总扭矩实现。此时两者产生的总拉力保持恒定,以防止使飞行器产生多余的俯仰运动。
21、本发明有益效果在于:
22、1、本发明中微小型高速共轴式复合飞行器可同时实现大速度前飞、垂直起降和低速巡航的任务要求。
23、2、本发明中微小型高速共轴式复合飞行器在旋翼模式下仅依靠各旋翼间转速差实现飞行器的姿态和位置控制,与传统倾转双旋翼及直升机相比,控制高效、结构简单,提高飞行器的可靠性。
24、3、本发明中微小型高速共轴式复合飞行器在高速前飞时通过机身两侧全动舵面实现飞行器的姿态和位置控制,相比于传统旋翼类飞行器,控制效率更高;前飞时旋翼与机身间气动干扰小,可减少气动力损失、提高前飞效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/219626.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表