自旋探测卫星的姿态控制方法
- 国知局
- 2024-08-01 05:31:12
本发明涉及自旋探测卫星的姿态控制方法,属于卫星姿态控制。
背景技术:
1、因科学探测任务的需求,一部分探测卫星采用自旋稳定的姿态控制方式。在探测地球外辐射带环境的卫星中,载荷正常工作需要卫星提供较高的自旋角速度,并且为去除卫星的剩磁干扰,需要柔性伸杆将载荷伸出卫星1m距离。考虑到卫星需要反复穿越外辐射带探测外磁场环境和对地数传的要求,该类探测卫星需要具备反复可靠起旋消旋的能力并且能够保持旋转过程自旋轴的指向精度。现有方式采用角动量交换转置实现整星起旋消旋和姿态控制,这种起旋方式具有节省燃料、提高控制精度、工作灵活可靠等多种优势。
2、但是,在卫星高速自旋过程中,星上部分高精度敏感器如星敏感器失效,难以简单高精度地获取完整的三轴姿态数据,仅仅能通过太阳敏感器等传感器获得自旋轴指向信息。由于每一组四元数对应着一个确定的姿态,通过四元数控制卫星自旋的传统方法需要设计、优化期望四元数的轨迹,对星上计算能力提出了较高的要求。
3、使载荷通过柔性伸杆伸出卫星1m距离,增加了卫星的转动惯量。在卫星高速自旋的过程中,卫星惯量积有关的交叉项和柔性伸杆的振动会对卫星的姿态控制产生较大的干扰,降低姿态控制的精度。式中为角速度,为实际转动惯量,此时可以使用自抗扰技术中的状态观测器对来自卫星内部和外部的干扰力矩进行估计,进一步提高卫星的控制精度。传统的非线性扩张状态观测器估计效果较好但调参困难,而线性化的状态观测器调参简单但估计精度下降。
技术实现思路
1、针对卫星高速自旋过程中难以获得完整姿态参数以及存在的干扰力矩影响卫星姿态控制精度的问题,本发明提供一种自旋探测卫星的姿态控制方法。
2、本发明的一种自旋探测卫星的姿态控制方法,包括,
3、基于刚体动力学建立卫星动力学方程,并转换为状态空间方程;
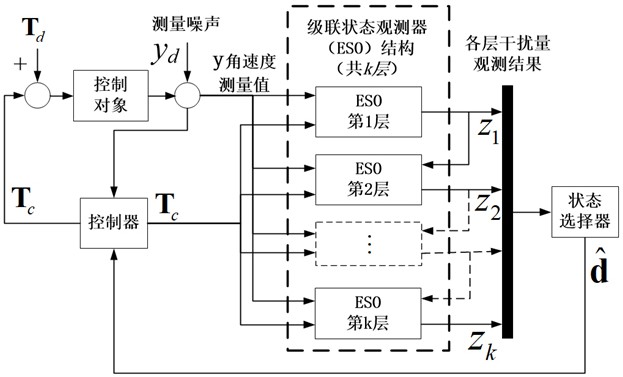
4、基于状态空间方程设计两层线性级联状态观测器,其中第一层线性状态观测器用于观测获取卫星的当前角速度估计值和当前干扰量估计值;第二层线性状态观测器基于第一层线性状态观测器的观测结果观测第一层线性状态观测器的跟踪误差;所述跟踪误差为当前角速度估计值和当前干扰量估计值与当前真实角速度和当前真实干扰量的差;再由当前干扰量估计值和跟踪误差计算得到卫星内外总干扰力矩估计值;
5、采用表征自旋轴方向的姿态参数设计pd控制律,并补偿卫星内外总干扰力矩估计值计算得到控制力矩,用于当前周期的卫星姿态控制;
6、再将计算得到的控制力矩输入线性级联状态观测器,观测下一周期的干扰量,并计算下一周期的控制力矩,实现卫星姿态控制。
7、根据本发明的自旋探测卫星的姿态控制方法,卫星动力学方程为:
8、,
9、式中为实际转动惯量,为干扰力矩,为控制力矩,为角速度,为角速度叉乘矩阵,为飞轮角动量,;
10、根据,
11、式中为转动惯量测量值,为转动惯量不确定量,
12、将动力学方程改写为:
13、,
14、其中为总干扰项:
15、;
16、将卫星动力学方程转换为状态空间方程:
17、,
18、式中为状态变量一,;为状态变量二,,为干扰量,为状态变量一的函数项,为控制力矩系数;
19、,
20、,
21、。
22、根据本发明的自旋探测卫星的姿态控制方法,第一层线性状态观测器为:
23、,
24、式中为当前角速度估计值,为当前干扰量估计值,为第一层线性状态观测器的线性系数一,为角速度测量值与角速度估计值的差,为第一层线性状态观测器的线性系数二。
25、根据本发明的自旋探测卫星的姿态控制方法,第二层线性状态观测器为:
26、,
27、式中为角速度跟踪误差,为干扰量跟踪误差,为第二层线性状态观测器的线性系数一,为角速度测量值与角速度跟踪误差的差,为第二层线性状态观测器的线性系数二;
28、,,
29、式中为角速度测量值。
30、根据本发明的自旋探测卫星的姿态控制方法,卫星内外总干扰力矩估计值表示为:
31、。
32、根据本发明的自旋探测卫星的姿态控制方法,pd控制律为:
33、,
34、式中为微分项系数,为角速度误差,为比例项系数,为表征自旋轴方向的姿态参数的误差,其复数表示为:
35、,
36、矩阵表示为:
37、,
38、,
39、,
40、式中为的实数部分,为的虚数部分,为微分项控制律系数,为比例项控制律系数。
41、根据本发明的自旋探测卫星的姿态控制方法,将按照3-2-1顺序转换成欧拉角为:
42、,
43、式中为滚转角,为俯仰角。
44、根据本发明的自旋探测卫星的姿态控制方法,微分项控制律系数和比例项控制律系数的确定方法为:
45、,,
46、式中为系统阻尼比,为系统无阻尼振荡角频率。
47、根据本发明的自旋探测卫星的姿态控制方法,线性级联状态观测器的四个线性系数的计算方法为:
48、,
49、式中为观测器观测结果收敛的角频率;
50、跟踪收敛时间为:
51、。
52、本发明的有益效果:本发明方法单独使用参数描述和控制自旋轴指向偏转的运动,无需获得完整姿态参数,降低了对敏感器的要求,并可满足反复起旋消旋的可靠与高速自旋过程高精度控制的需要。
53、本发明方法使用两层线性级联的状态观测器估计内部、外部扰动,内部、外部扰动包括复杂干扰力矩和测量误差,可以提高姿态控制精度,且参数调节简单,工程实践应用潜力大。
54、本发明方法使用(,z)参数对自旋卫星的姿态进行描述,解决了高速自旋情况下卫星无法获取完整三轴信息的问题,同时仅使用参数进行自旋轴方向的描述和控制,相比起传统四元数方法,简化了计算过程,减小了计算量。
55、本发明方法设计的线性级联扩张状态观测器,相比起传统的非线性扩张状态观测器,具有整定参数少,易于调节,性能稳定的优势;相比起传统的线性扩张状态观测器,大幅度提高了观测精度。
技术特征:1.一种自旋探测卫星的姿态控制方法,其特征在于包括,
2.根据权利要求1所述的自旋探测卫星的姿态控制方法,其特征在于,
3.根据权利要求2所述的自旋探测卫星的姿态控制方法,其特征在于,
4.根据权利要求3所述的自旋探测卫星的姿态控制方法,其特征在于,
5.根据权利要求4所述的自旋探测卫星的姿态控制方法,其特征在于,
6.根据权利要求5所述的自旋探测卫星的姿态控制方法,其特征在于,
7.根据权利要求6所述的自旋探测卫星的姿态控制方法,其特征在于,
8.根据权利要求7所述的自旋探测卫星的姿态控制方法,其特征在于,
9.根据权利要求8所述的自旋探测卫星的姿态控制方法,其特征在于,
技术总结一种自旋探测卫星的姿态控制方法,属于卫星姿态控制领域。本发明针对卫星高速自旋过程中难以获得完整姿态参数以及存在干扰力矩影响卫星姿态控制精度的问题。包括:建立卫星动力学方程并转换为状态空间方程;设计两层线性级联状态观测器,其中第一层线性状态观测器用于观测获取卫星的当前角速度估计值和当前干扰量估计值;第二层状态观测器基于第一层线性状态观测器的观测结果观测第一层线性状态观测器的跟踪误差;再由当前干扰量估计值和其跟踪误差计算得到卫星内外总干扰力矩估计值;采用表征自旋轴方向的姿态参数设计PD控制律,并补偿卫星内外总干扰力矩估计值计算得到控制力矩,用于当前周期的卫星姿态控制。本发明方法用于卫星的姿态控制。技术研发人员:奚瑞辰,刘再华,魏超,王伟鉴,吴凡,乐欣龙受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/220148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。