基于轴向磁力支撑的高转速隐身无人机及控制方法
- 国知局
- 2024-08-01 05:32:49
本技术涉及无人机,具体涉及到一种基于轴向磁力支撑的高转速隐身无人机及姿态控制方法。
背景技术:
1、无人机具有机动性强、使用成本低、结构简单、控制容易、可重复使用等优点,现越来越多的应用在军事和民用等领域。
2、无人机能够悬停在空中并具有较好的机动性,非常有利于执行作业任务,而对于有隐身和负载需求的无人机来说,现有无人机设备的飞行隐身和负载功能较差,在丘陵和山林中飞行其桨叶容易撞击损坏,影响无人机使用寿命。
3、为增加有隐身和负载需求无人机的飞行时间和负载,需要设计出质量轻、效率高、噪音小的新型无人机结构。
技术实现思路
1、本技术的目的在于提供一种基于轴向磁力支撑的高转速隐身无人机机姿态控制方法,可有效提高无人机的隐身性能,降低噪声,增加负载能力,并提高无人机的机身安全性。
2、为解决上述技术问题,本发明采用如下技术方案:
3、一种基于轴向磁力支撑的高转速隐身无人机,其特征在于包括:
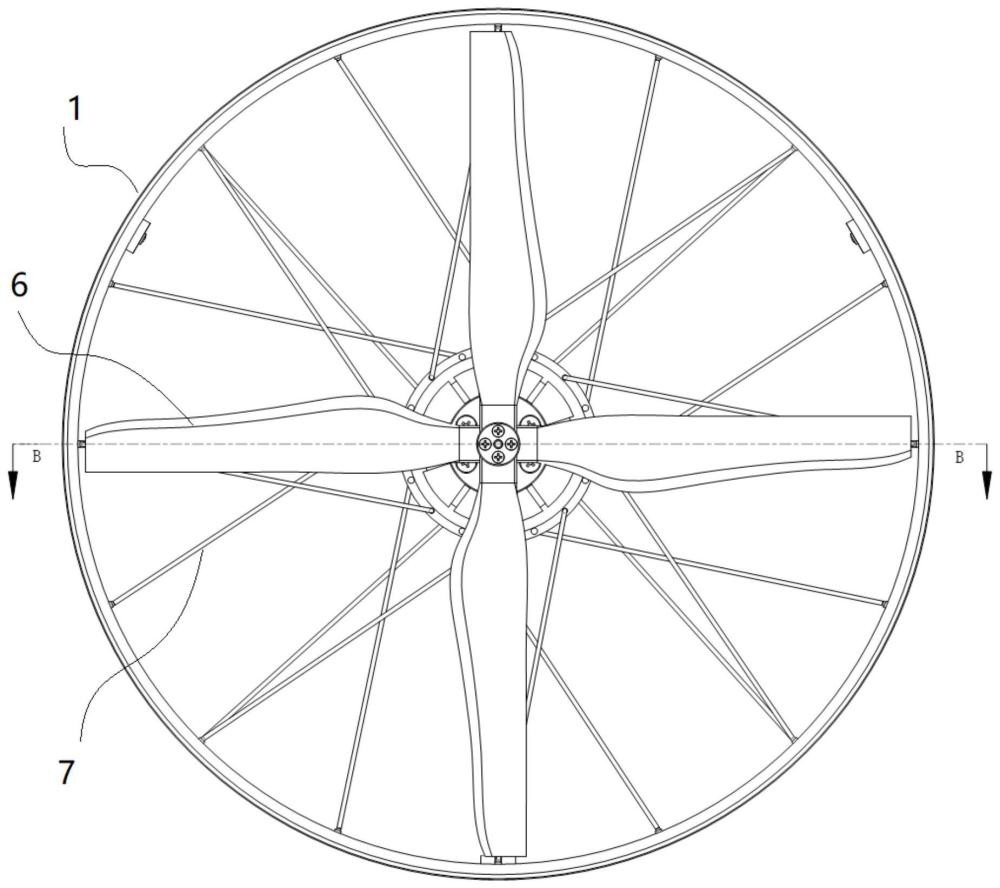
4、旋翼装置,由两个叶桨上下成角度叠装在驱动装置上构成;
5、驱动装置,为盘式永磁电机,电机永磁体设置在电机转盘的底部,与电子定子轴向间隔设置;盘式永磁电机底部设置被动永磁体;
6、轴向磁悬浮结构,设置在盘式永磁电机下方,包括磁悬浮轴承转盘和以及磁悬浮轴承定子;磁悬浮轴承转盘上表面带有另一被动永磁体且与盘式永磁电机底部被动永磁体形成相斥磁悬浮结构;磁悬浮轴承转子片安装在磁悬浮轴承转盘下方,电机转轴穿过磁悬浮轴承转盘和磁悬浮轴承定子内圈设置;
7、飞行控制装置,在轴向磁悬浮结构下方设置,主要包括舵机、以及连接在舵机下方的多个径向舵片,舵片偏转角度设置为根据舵机调整以控制无人机航行姿态控制;
8、涵道,从外围成圆筒形围合旋翼装置,且在涵道底部和涵道内壁设置支撑装置以实现径向和轴向支撑。
9、上述技术方案中,磁悬浮轴承转子片与磁悬浮轴承定子轴向间隙为0.5mm。
10、上述技术方案中,翼装置由两个两叶桨构成,两个两叶桨上下成90°角度叠装在盘式电机转盘上。
11、上述技术方案中,电机转盘与电机转轴紧固连接,中间采用两个机械轴承与电机定子可旋转地支承。
12、上述技术方案中,电机转子与定子的轴向间隙为0.5mm-1mm。
13、上述技术方案中,轴向磁悬浮结构和驱动装置设置中间部件外壳,涵道与中间部件外壳利用支撑结构径向紧固连接。
14、上述技术方案中,轴向磁悬浮结构和驱动装置设置用于这逼的中间部件外壳,涵道与中间部件外壳利用支撑结构紧固连接。
15、上述技术方案中,电机转轴从磁悬浮轴承转盘和磁悬浮轴承定子内圈穿出后通过中间部件外壳后连接滚动接触装置形成缓冲结构,且在电机转轴末端设置电涡流位移传感器以检测位移。
16、上述技术方案中,电机转轴端部使用螺母固定安装,其中螺母下端面与底板使用滚珠间隔形成端面摩擦缓冲结构,底板固定在底壳的圆槽内,并将电涡流位移传感器安装在底板中心孔位置。
17、上述技术方案中,磁悬浮轴承定子内圈镶嵌永磁体环。
18、上述技术方案中,磁悬浮轴承定子为截面为u型的磁悬浮轴承定子,线圈设置在u型槽中。
19、一种基于轴向磁力支撑的高转速隐身无人机控制方法,其特征在于包括如下步骤:
20、s1:获取无人机初始参考的横滚角俯仰角θ、偏航角ψ,将姿态解算后的三个角度参数与考的横滚角俯仰角θ、偏航角ψ进行比较,对差值进行编码解算与互补滤波处理,之后输入自适应滑膜控制器以输出姿态参数;
21、s2:根据输出姿态参数调整舵机偏转角与电机转速;
22、s3:调整后的舵机偏转角与电机转速输入rbf神经网络进行训练;
23、s4:训练后输出的舵机偏转角与电机转速参数重新进入自适应滑膜控制器以获取姿态参数;
24、s5:重复步骤s2,如果达到需要的控制姿态,则调整后的舵机偏转角与电机转速输入无人机以执行新姿态飞行,如果未达到需要的控制姿态则重复步骤s3和步骤s4;
25、s6:执行新姿态飞行过程中,姿态参考系统(ahrs)实施输出无人机的横滚角、俯仰角、偏航角;
26、s7:根据实时横滚角、俯仰角、偏航角进行姿态解算,将姿态解算后的三种横滚角、俯仰角、偏航角的角度参数与无人机姿态参考的三个姿态参数进行比较,循环进行自适应控制。
27、综上,本发明主要包含涵道式单旋翼无人机机身结构以及配套的飞行控制系统。
28、旋翼无人机由盘式永磁电机驱动,盘式电机具有高功率转矩密度、高效率以及结构紧凑的特点,非常适用于高性能应用场合,如对低噪音和平滑转矩有高要求的直驱系统。其单定转子结构最为简单,非常适用于无人机的驱动系统。
29、电机转盘上端安装由两片两叶桨组成的旋翼系统,电机下端安装混合轴向磁悬浮轴承,电机的转子轴与轴向磁悬浮轴承转子为一体结构,在电机带动旋翼旋转时,同时启动混合主动磁悬浮轴承系统,实现桨叶-电机转盘-转轴的旋转装置轴向悬浮,悬浮时降低了转轴的摩擦损耗和噪音,提高了旋转速度,增加了承载能力与隐身性能。
30、无人机使用涵道作为支承,旋翼的中间体外壳与涵道采用辐条紧固连接,能有效减轻机身自重,同时涵道为无人机带来附加升力,能更有效的保护桨叶并降低桨叶噪声。涵道式无人机在无人机外增加涵道,作为包裹无人机均环形机翼,利用涵道会显著提高无人机的拉力效率特性。为无人机增加涵道外壳可提升整体升力10%左右,并且涵道能保护无人机不受碰撞,在增加安全性的同时降低了噪声,提高悬停效率,其结构紧凑,非常适用于侦察、巡防等任务。
31、飞行控制系统结合磁悬浮轴承控制以及常规的飞行姿态控制,开发了基于径向基rbf神经网络自适应滑膜控制的飞行控制系统,在开始飞行时同时启动磁悬浮轴承系统,使旋翼稳定轴向悬浮,飞行姿态的执行部件为控制舵片偏转角度的舵机,调整舵片角度实现旋翼垂直起降、俯仰、平飞等姿态飞行。该轴向悬浮的涵道式旋翼结构旋转摩擦小,转速高,负载大,噪声小,能大幅度提高飞行隐身和承载性能。
32、无人机的螺旋桨有多种结构形式,两叶桨效率较高,适用于对速度和机动性要求较高的飞行器,对于驱动系统的转速较高而扭矩较低的盘式电机,采用两个两桨叶可提升无人机系统的升力和运行效率。
33、磁悬浮技术是利用磁力克服重力使物体悬浮的一种技术,其中磁悬浮轴承技术能大幅度减少定子与转子间的机械摩擦,降低能耗。轴向磁悬浮轴承能将转盘稳定悬浮,引入磁悬浮轴承到无人机中,将转轴进行稳定悬浮,可大幅度降低摩擦损耗和噪音,提高旋转速度,增加承载能力与飞行时间。
34、与现有技术相比,本发明有以下有优点:
35、1.采用磁悬浮轴承技术,无人机运行时,轴向悬浮,旋转速度高,噪音小,隐身性能强,负载能力强。
36、2.桨叶-电机转盘-转轴可轴向悬浮的新型结构,盘式永磁电机作为驱动,电机启动后带动电机转盘旋转,桨叶加速旋转提高升力,带动桨叶-电机转盘-转轴结构上浮,启动主动磁悬浮系统,磁悬浮轴承将转盘稳定悬浮,令桨叶-电机转盘-转轴结构保持轴向悬浮状态。
37、同时,转轴底端采用滚珠减少摩擦,增加零部件的可替换性。
38、3.增加涵道外壳,并用辐条连接紧固,在减轻整机重量时同时可提升机身的整体升力,并能防止桨叶碰撞。
39、4.飞行控制系统采用径向基神经网络自适应滑膜控制,能加速训练飞行姿态与偏转角度的数值样本,并可加强飞行系统的鲁棒性,保证无人机飞行姿态调整的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220294.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表