一种植保无人机旋翼气流强度的控制方法及装置
- 国知局
- 2024-08-01 05:45:40
本发明涉及无人机植保作业,具体涉及一种植保无人机旋翼气流强度的控制方法及装置。
背景技术:
1、无人机在近年来得到了迅速的应用和发展,植保无人机在农业航空技术中占据了主导地位。以往的植保无人机存在着续航时间短、载重量小等诸多问题。随着无人机技术的不断进步,植保无人机的续航和载重也不断提升,得以应用到更多的农业生产中。
2、随着植保无人机的续航和载重的提升,意味着植保无人机自重也在增加,无人机飞行依靠旋翼提供升力,为了提高升力,无人机的旋翼尺寸越来越大,无人机旋翼下方的气流强度也在增大,过高的气流强度会导致作物出现损伤,甚至出现倒伏减产的情况。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种植保无人机旋翼气流强度的控制方法,该方法可在动力损失较小的情况下,通过被动旋转的叶片减弱植保无人机旋翼下方的气流强度,防止作物出现损伤、倒伏的情况,提高了植保无人机的作业效果。
2、本发明的另一个目的在于提供一种植保无人机旋翼气流强度的控制装置。
3、本发明的目的通过以下技术方案实现:
4、一种植保无人机旋翼气流强度的控制方法,所述控制方法通过设置在植保无人机旋翼下方的执行模块来调整植保无人机旋翼下方的气流,所述植保无人机旋翼下方的气流促使执行模块的叶片发生被动旋转,所述控制方法包括以下步骤:
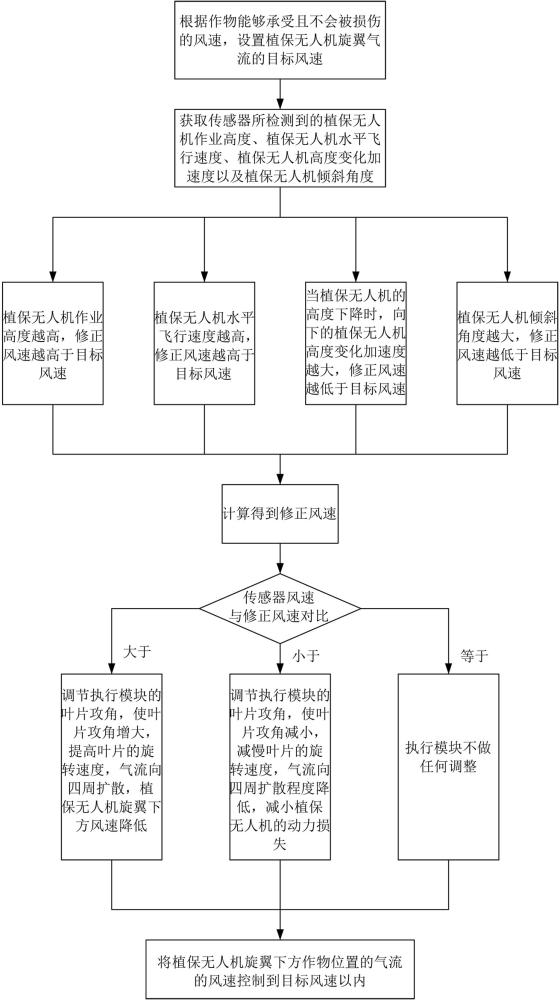
5、(s1)根据作物能够承受且不会被损伤的风速,设置植保无人机旋翼气流的目标风速;
6、(s2)获取传感器所检测到的植保无人机作业高度、植保无人机水平飞行速度、植保无人机高度变化加速度以及植保无人机倾斜角度;
7、(s3)根据目标风速与植保无人机作业高度、植保无人机水平飞行速度、植保无人机高度变化加速度以及植保无人机倾斜角度之间的关系,计算得到修正风速;
8、(s4)获取传感器风速,所述传感器风速是由传感器所检测到的植保无人机旋翼气流的实时风速;将传感器风速与修正风速进行对比;
9、(s5)执行模块根据对比结果进行以下操作:
10、当植保无人机旋翼气流的当前风速大于修正风速时,调节执行模块的叶片攻角,使叶片攻角增大,提高叶片的旋转速度,气流向四周扩散,植保无人机旋翼下方风速降低;
11、当植保无人机旋翼气流的当前风速小于修正风速时,调节执行模块的叶片攻角,使叶片攻角减小,减慢叶片的旋转速度,气流向四周扩散程度降低,减小植保无人机的动力损失;
12、当植保无人机旋翼气流的当前风速等于修正风速时,执行模块不做任何调整。
13、上述植保无人机旋翼气流强度的控制方法中,传感器所检测到的风速并不是作物实际受到的风速大小,而是传感器所在位置的风速;飞行高度比较高时,传感器与作物之间的距离比较大,旋翼气流在经过长距离后,风速会有所衰减,传感器检测到的风速要大于目标风速;如果植保无人机处于运动状态,传感器检测到的风速也大于目标风速,因此,需要通过修正风速来精准控制。
14、本发明的一个优选方案,其中,步骤(s3)中,目标风速与植保无人机作业高度、植保无人机水平飞行速度、植保无人机高度变化加速度以及植保无人机倾斜角度之间的关系为:
15、植保无人机作业高度越高,修正风速越高于目标风速;植保无人机水平飞行速度越高,修正风速越高于目标风速;当植保无人机的高度下降时,向下的植保无人机高度变化加速度越大,修正风速越低于目标风速;植保无人机倾斜角度越大,修正风速越低于目标风速。
16、一种植保无人机旋翼气流强度的控制装置,包括控制器、传感器以及执行模块;所述控制器分别与所述传感器以及执行模块连接;其中,所述执行模块安装在植保无人机的旋翼电机下方,所述旋翼电机用于驱动植保无人机旋翼转动,所述执行模块以旋转的方式给气流附加切向速度,使气流向四周扩散来增大植保无人机旋翼气流的覆盖面积,从而使气流速度降低。
17、上述植保无人机旋翼气流强度的控制装置的工作原理是:
18、传感器用于检测植保无人机作业高度、植保无人机水平飞行速度、植保无人机高度变化加速度、植保无人机倾斜角度、植保无人机旋翼气流的风速;本发明的装置的转速控制与植保无人机水平飞行速度、植保无人机总体质量、植保无人机实时转速相关,由传感器所检测到的植保无人机旋翼气流的风速数据作为检测值,反馈给控制器,从而调节控制装置,具体地,植保无人机在作业时,植保无人机旋翼下方气流促使执行模块的叶片发生被动旋转,通过将传感器风速与修正风速进行对比,对叶片的攻角进行调节,减小植保无人机的动力损失,减弱植保无人机旋翼气流强度。
19、优选地,所述传感器包括基于植保无人机自身飞行控制器的姿态传感器、旋翼电机转速传感器以及风速传感器;所述姿态传感器用于获取植保无人机作业高度、植保无人机水平飞行速度、植保无人机高度变化加速度以及植保无人机倾斜角度;所述旋翼电机转速传感器用于检测植保无人机旋翼转速的变化;所述风速传感器用于检测植保无人机旋翼气流的风速。上述结构中,旋翼电机用于驱动植保无人机旋翼(即螺旋桨)转动,因此,旋翼电机转速传感器可以检测植保无人机旋翼转速的变化,风速传感器可以检测植保无人机旋翼气流的实时风速,具体检测植保无人机旋翼下方气流的实时风速。
20、优选地,所述执行模块包括设置在旋翼电机底部的旋转机构、设置在所述旋转机构上的差动变位机构、设置在所述差动变位机构上的叶片以及用于驱动所述差动变位机构运动以改变叶片的角度与位置的驱动机构。上述结构中,叶片在植保无人机旋翼气流带动下,发生被动旋转,差动变位机构、叶片、驱动机构一同旋转,驱动机构可以驱动差动变位机构运动,进而改变叶片的角度与位置,所述叶片的角度包括叶片的掠角和攻角,根据修正风速,可以灵活调节叶片的攻角。
21、优选地,所述旋转机构包括转动底座以及设置在所述转动底座上的转动滑轨;所述转动底座与所述旋翼电机之间通过安装座连接,所述安装座固定在旋翼电机的底部,所述转动底座转动连接在所述安装座上。通过设置安装座,便于转动底座的安装,同时也便于与旋翼电机的底部连接。
22、优选地,所述差动变位机构包括多个差动环,多个差动环均套设在所述转动滑轨上,所述差动环沿着转动滑轨的轴线方向与所述转动滑轨滑动连接;多个差动环包括一个掠角上差动环、一个掠角下差动环以及至少一个攻角差动环;所述掠角上差动环与所述掠角下差动环之间设有连杆组件,所述连杆组件包括上连杆以及下连杆;其中,所述上连杆的一端与所述掠角上差动环铰接,所述下连杆的一端与所述掠角下差动环铰接,所述上连杆的另一端与所述下连杆的另一端铰接;所述叶片安装在所述上连杆上;所述攻角差动环与所述叶片之间通过拉线连接。上述结构中,驱动机构驱动差动环沿着转动滑轨运动,当掠角上差动环与掠角下差动环之间的距离发生变化时,上连杆与下连杆之间的角度也会发生改变,进而使得叶片的掠角也会发生变化;具体地,当掠角上差动环与掠角下差动环之间的距离变大时,叶片越靠近转动滑轨,掠角也越小;当掠角上差动环与掠角下差动环之间的距离变小时,叶片越远离转动滑轨,掠角也越小;通过改变掠角,进而改变等效直径,以适应不同尺寸的植保无人机旋翼(螺旋桨),提高了执行模块的适用性;当攻角差动环沿着转动滑轨运动时,会拉动拉线,拉线牵拉叶片,叶片发生转动,实现叶片的攻角变化。
23、优选地,所述驱动机构包括多组驱动组件,每组驱动组件与每个差动环一一对应设置,其中,每组驱动组件包括设置在转动底座内部的驱动电机、设置在驱动电机的主轴上的主动带轮、设置在所述转动滑轨下端的从动带轮以及连接在主动带轮与从动带轮之间的传动带,所述传动带与所述差动环连接。上述结构中,每组驱动组件的传动带均连接一个差动环,通过驱动电机带动传动带,进而实现了差动环的运动,多个驱动电机分别控制多个差动环运动,可以对差动环进行灵活控制。
24、优选地,所述执行模块还包括限速机构,所述限速机构包括多个设置在所述转动底座内部的离心摩擦片。当旋转机构的旋转速度过大时,转动底座内部的离心摩擦片被甩出,紧贴安装座的内壁,产生摩擦阻尼,限制旋转机构的转速。
25、优选地,所述上连杆上设有凸出轴,所述叶片转动连接在所述凸出轴上;所述凸出轴的内部为空心结构;所述叶片包括翼片、柔性蒙皮以及机翼组件,所述翼片转动设置在所述凸出轴上,所述翼片上设有连接孔,所述连接孔与其中一个攻角差动环通过拉线连接;所述机翼组件包括旋转翼梁以及翼肋;其中,所述旋转翼梁与所述凸出轴转动连接,所述翼肋固定安装在所述旋转翼梁上,所述柔性蒙皮蒙在翼肋上;所述旋转翼梁与拉线之间设有第一传动机构,所述第一传动机构包括转轴塞柱、圆柱凸起、直槽口、倾斜槽口以及复位弹簧;所述转轴塞柱设置在所述凸出轴的内部,所述转轴塞柱通过拉线与另外的攻角差动环连接,所述圆柱凸起设置在所述转轴塞柱上,所述直槽口设置在所述凸出轴上,所述倾斜槽口设置在所述旋转翼梁上;所述圆柱凸起与所述直槽口以及倾斜槽口配合连接;所述复位弹簧设置在凸出轴的内部,用于转轴塞柱的复位。上述结构中,旋转翼梁可以旋转但不能轴向移动,直槽口在倾斜槽口之外,在圆柱凸起与直槽口的作用下,转轴塞柱只能沿凸出轴的轴向方向移动,而不能旋转,在转轴塞柱移动时,圆柱凸起也在直槽口上移动,圆柱凸起对倾斜槽口施加压力,迫使旋转翼梁发生偏转,从而带动翼肋进行旋转;通过攻角差动环的运动,拉动拉线运动,进而带动机翼组件和或翼片旋转,实现叶片的攻角调节。
26、优选地,所述叶片为分段式结构,所述机翼组件设有多组,多组机翼组件中的旋转翼梁首尾相套接安装,所述旋转翼梁的内部为空心结构,相邻两个旋转翼梁之间设有第二传动机构;所述第二传动机构的具体结构与所述第一传动机构的具体相同,所述第二传动机构的直槽口设置在其中一个旋转翼梁上,第二传动机构的倾斜槽口设置在另一个旋转翼梁上;即一个旋转翼梁的一端设有直槽口,另一端设有倾斜槽口;所有的翼肋外表面蒙上一层所述柔性蒙皮,一组机翼组件对应一个攻角差动环,攻角差动环的数量等于机翼组件的数量加上翼片的数量;通过多个攻角差动环,实现翼片、机翼组件的攻角控制,即叶片每段的攻角都单独可控。
27、本发明与现有技术相比具有以下有益效果:
28、1、本发明中的植保无人机旋翼气流的强度控制方法,能够降低植保无人机旋翼下方的气流强度,防止作业过程中因气流强度过高出现作物损伤、倒伏的现象。
29、2、本发明中的植保无人机旋翼气流的强度控制方法,叶片是在植保无人机旋翼气流中被动旋转,而非对植保无人机旋翼气流进行遮挡,因此对植保无人机的升力损失小。
30、3、本发明中的植保无人机旋翼气流强度的控制装置,叶片可进行上下距离、攻角和前后掠角的调整,因而可以适用于不同型号的植保无人机,通用性强。
31、4、本发明中的植保无人机旋翼气流强度的控制装置,叶片为分段式结构,每段叶片的攻角均可调整,可以实现对气流强度的局部调整。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221266.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表