一种仿鸟扑翼飞行器的制作方法
- 国知局
- 2024-08-01 05:47:14
本发明涉及无人飞行器,特别是涉及一种扑翼与固定翼结合的仿鸟扑翼飞行器。
背景技术:
1、仿鸟扑翼飞行器是指基于仿生学原理模仿自然界飞行生物,利用机翼的往复运动产生升力与推力的飞行器。相比于固定翼与旋翼飞行方式,仿鸟扑翼飞行器具有机动性强、推进效率高、安全性好、微型化程度高等特点。基于此类特点,近年来仿鸟扑翼飞行器得到了迅速发展。
2、仿鸟扑翼飞行器在起飞时一般需要外界投掷,从而获得一定初速度,这限制了仿鸟扑翼飞行器的起飞自主性,而且仿鸟扑翼飞行器通常不具备起落架,很有可能无法稳定降落,在降落时受到的损害较大。
3、此外,现有的中小型仿鸟扑翼飞行器一般在室外执行飞行任务,由于自身尺寸限制,整体质量偏轻,产生的推力有限,导致抗风能力较差。
4、因此,如何提供一种仿鸟扑翼飞行器,解决起降自主性能不佳及抗风性差的问题,是迫切需要本领域技术人员解决的技术问题。
技术实现思路
1、鉴于上述问题,本发明提供用于克服上述问题或者至少部分地解决上述问题的一种仿鸟扑翼飞行器。具有更高的自主性、抗风性和安全性。在提高了仿鸟扑翼飞行器起降自主性的同时,提高了抗风性能。
2、本发明提供了如下方案:
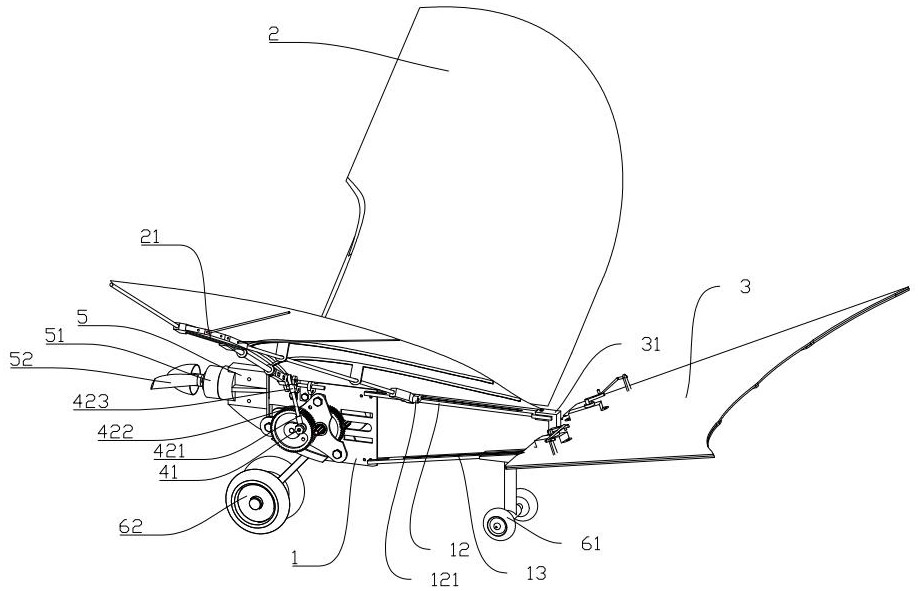
3、一种仿鸟扑翼飞行器,包括:
4、机身骨架,所述机身骨架包括主机体、上骨架以及下骨架;所述上骨架以及所述下骨架均与所述主机体相连,所述上骨架与所述下骨架的末端由尾翼固定件连接;
5、两个仿生扑翼,两个所述仿生扑翼分布于所述机身骨架的两侧,并通过肱骨连接件与所述机身骨架配合连接;
6、仿生尾翼,所述仿生尾翼通过所述尾翼固定件与所述机身骨架相连,所述尾翼固定件用于使所述仿生尾翼形成固定俯仰角,所述仿生尾翼用于协助仿鸟扑翼飞行器完成转向控制以及俯仰控制;
7、驱动机构,所述驱动机构与所述主机体相连且与一对所述仿生扑翼配合连接;所述驱动机构用于驱动两个所述仿生扑翼扑动;
8、螺旋桨机构,所述螺旋桨机构与所述主机体的前方相连,所述螺旋桨机构用于协助仿鸟扑翼飞行器自主起降;
9、起落架机构,所述起落架机构包括前轮以及后轮,所述前轮与所述主机体的下方相连,所述后轮与所述下骨架相连,所述起落架机构用于协助仿鸟扑翼飞行器起飞以及滑翔降落。
10、优选地:所述主机体包括碳板;所述碳板的上边缘平直且下边缘为弧形,所述碳板的右端上侧连接所述上骨架,所述碳板的右端下侧连接所述下骨架,所述上骨架与所述主机体上边缘平行,所述下骨架向上倾斜与所述上骨架的延长线交线夹角为9°~11°。
11、优选地:所述仿生扑翼包括扑翼骨架以及覆盖于所述扑翼骨架外部的仿生扑翼蒙皮;所述仿生扑翼蒙皮包括航空隔音棉材质;
12、所述扑翼骨架包括内侧弧面段以及外侧平面段,所述内侧弧面段包括至少两条流线型翼肋,所述外侧平面段包括由聚乳酸材质的翼尖连接件连接的直径为2毫米的直线碳纤维杆翼肋以及两根直径为1毫米的直线碳纤维杆翼肋;所述翼尖连接件分别与主外缘杆和副杆呈三角连接;至少两条所述流线型翼肋均与所述主外缘杆和所述副杆相连。
13、优选地:所述直径为2毫米的直线碳纤维杆翼肋与所述主外缘杆平行,所述直径为2毫米的直线碳纤维杆翼肋与两根所述直径为1毫米的直线碳纤维杆翼肋各自交线分别呈30°分布;所述主外缘杆远离所述翼尖连接件的一端与所述肱骨连接件连接,所述副杆远离所述翼尖连接件的一端与聚乳酸材质的l形件连接;
14、所述肱骨连接件用于与铝制限位件通过轴实现相铰接;所述聚乳酸材质的l形件用于与聚乳酸材质的转动件通过螺栓相铰接。
15、优选地:所述固定俯仰角的角度为15°~20°。
16、优选地:所述仿生尾翼包括仿生尾翼骨架以及仿生尾翼蒙皮;所述仿生尾翼骨架包括安定面、两个控制面、两个卡槽连接件、两个空间拉杆、两个舵机以及两个舵机臂;所述安定面与所述尾翼固定件固定相连,两个所述控制面可旋转的连接于所述安定面两侧,两个所述卡槽连接件分别与两个所述控制面一一对应固定相连,两个所述舵机均与所述安定面固定相连;两个所述舵机分别一一对应的与两个所述舵机臂相连,所述卡槽连接件与所述舵机臂通过空间拉杆连接,所述舵机用于通过所述舵机臂以及所述空间拉杆带动所述控制面绕与所述安定面配合的轴线转动。
17、优选地:所述驱动机构包括二级直齿减速组系统;所述二级直齿减速组系统包括两个第二级从动齿轮,所述第二级从动齿轮通过球头空间连杆与所述肱骨连接件相连;
18、所述球头空间连杆包括第一球头扣、双头螺栓以及第二球头扣;调节所述第一球头扣与所述第二球头扣的间距以及两个所述第二级从动齿轮的间距,以使所述仿生扑翼的上下扑动角度在 -45°~45°之间。
19、优选地:所述螺旋桨机构包括螺旋桨、螺旋桨电机以及螺旋桨固定件;所述螺旋桨与所述螺旋桨电机配合连接,所述螺旋桨电机通过所述螺旋桨固定件与所述主机体连接;所述螺旋桨固定件两侧包括加强筋。
20、优选地:所述起落架机构包括后轮、前轮、前轮支撑架、前轮固定架以及后轮支撑架;所述前轮支撑架分别与所述前轮以及所述前轮固定架相连;所述后轮与所述后轮支撑架相连,所述前轮固定架与所述主机体相连,所述前轮固定架与所述主机体的下沿弧度一致。
21、优选地:所述前轮支撑架与水平地面角度为43°~46°,所述后轮支撑架与水平地面垂直。
22、根据本发明提供的具体实施例,本发明公开了以下技术效果:
23、本申请实施例提供的一种仿鸟扑翼飞行器,基于固定翼原理,仿生扑翼处于水平静止状态,螺旋桨启动后,提供推力和升力,带动飞行器起飞;起飞后,基于扑翼飞行原理,主要依靠仿生扑翼往复扑动提供推力和升力;降落时,可借助起落架完成平稳落地。遇到强风天气时,螺旋桨工作,主要为仿鸟扑翼飞行器补充推力,增强抗风能力。在提高仿鸟扑翼飞行器起降自主性的同时,增强了仿鸟扑翼飞行器的抗风能力。
24、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:1.一种仿鸟扑翼飞行器,其特征在于,包括:
2.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述主机体包括碳板;所述碳板的上边缘平直且下边缘为弧形,所述碳板的右端上侧连接所述上骨架,所述碳板的右端下侧连接所述下骨架,所述上骨架与所述主机体上边缘平行,所述下骨架向上倾斜与所述上骨架的延长线交线夹角为9°~11°。
3.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述仿生扑翼包括扑翼骨架以及覆盖于所述扑翼骨架外部的仿生扑翼蒙皮;所述仿生扑翼蒙皮包括航空隔音棉材质;
4.根据权利要求3所述的仿鸟扑翼飞行器,其特征在于,所述直径为2毫米的直线碳纤维杆翼肋与所述主外缘杆平行,所述直径为2毫米的直线碳纤维杆翼肋与两根所述直径为1毫米的直线碳纤维杆翼肋各自交线分别呈30°分布;所述主外缘杆远离所述翼尖连接件的一端与所述肱骨连接件连接,所述副杆远离所述翼尖连接件的一端与聚乳酸材质的l形件连接;
5.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述固定俯仰角的角度为15°~20°。
6.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述仿生尾翼包括仿生尾翼骨架以及仿生尾翼蒙皮;所述仿生尾翼骨架包括安定面、两个控制面、两个卡槽连接件、两个空间拉杆、两个舵机以及两个舵机臂;所述安定面与所述尾翼固定件固定相连,两个所述控制面可旋转的连接于所述安定面两侧,两个所述卡槽连接件分别与两个所述控制面一一对应固定相连,两个所述舵机均与所述安定面固定相连;两个所述舵机分别一一对应的与两个所述舵机臂相连,所述卡槽连接件与所述舵机臂通过空间拉杆连接,所述舵机用于通过所述舵机臂以及所述空间拉杆带动所述控制面绕与所述安定面配合的轴线转动。
7.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述驱动机构包括二级直齿减速组系统;所述二级直齿减速组系统包括两个第二级从动齿轮,所述第二级从动齿轮通过球头空间连杆与所述肱骨连接件相连;
8.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述螺旋桨机构包括螺旋桨、螺旋桨电机以及螺旋桨固定件;所述螺旋桨与所述螺旋桨电机配合连接,所述螺旋桨电机通过所述螺旋桨固定件与所述主机体连接;所述螺旋桨固定件两侧包括加强筋。
9.根据权利要求1所述的仿鸟扑翼飞行器,其特征在于,所述起落架机构包括后轮、前轮、前轮支撑架、前轮固定架以及后轮支撑架;所述前轮支撑架分别与所述前轮以及所述前轮固定架相连;所述后轮与所述后轮支撑架相连,所述前轮固定架与所述主机体相连,所述前轮固定架与所述主机体的下沿弧度一致。
10.根据权利要求9所述的仿鸟扑翼飞行器,其特征在于,所述前轮支撑架与水平地面角度为43°~46°,所述后轮支撑架与水平地面垂直。
技术总结本发明公开了一种仿鸟扑翼飞行器,基于固定翼原理,仿生扑翼处于水平静止状态,螺旋桨启动后,提供推力和升力,带动飞行器起飞;起飞后,基于扑翼飞行原理,主要依靠仿生扑翼往复扑动提供推力和升力;降落时,可借助起落架完成平稳落地。遇到强风天气时,螺旋桨工作,主要为仿鸟扑翼飞行器补充推力,增强抗风能力。在提高仿鸟扑翼飞行器起降自主性的同时,增强了仿鸟扑翼飞行器的抗风能力。技术研发人员:张春华,刘满,王聪,王俊玲,张恒,张丹,熊金,吕卫强,廖士楠,魏文彬受保护的技术使用者:中国兵器装备集团自动化研究所有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/221422.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表