基于被动驾驶机器人为无人机起飞助力的弹射机械臂的制作方法
- 国知局
- 2024-08-01 05:47:33
本申请涉及智慧交通机器人,特别是涉及基于被动驾驶机器人为无人机起飞助力的弹射机械臂。
背景技术:
1、自动驾驶技术作为一项革命性的创新,正在改变着汽车行业的未来。而被动驾驶机器人其中关键的组件,是指无需对车辆进行改装,可无损安装在驾驶室内,替代驾驶员在恶劣条件和危险环境下进行车辆驾驶的特种机器人。目前的被动驾驶机器人它不仅仅单单具有驾驶功能,在交通行业,集交管机器人,救援,拖车等功能于一身。
2、随着经济的发展,无人机在交通领域,逐渐多功能化,用于交通巡逻、路产维护、交通拥堵疏导、应急处置等各个方面,无人机可实时对道路情况进行监测;无人机可通过航拍获取现场交通事故图片,加速事故处理速度,为交通管理部门提供数据支持;无人机可以不受道路情况的限制和任何管制在空中巡视,因此能够在较短时间内完成交通监控、巡逻和巡检,这对于交通管理人员来说,可以省时且效率更高。现有技术中无人机的弹射装置需要额外携带,驾驶机器人不具备无人机弹射功能,无人机由于本身的重量在运输中易毁坏,无法对无人机进行助飞或者在助飞过程中造成无人机损坏,所以本申请提供了一种基于被动驾驶机器人为无人机起飞助力的弹射机械臂,在拥有被动驾驶功能,指挥交通的同时,兼有无人机起飞弹射功能,助力无人机起飞,避免额外携带弹射装置。
技术实现思路
1、本申请的目的是提供基于被动驾驶机器人为无人机起飞助力的弹射机械臂,在拥有被动驾驶功能并且指挥交通的同时,兼有无人机起飞弹射功能,助力无人机起飞,避免弹射装置的运输和携带,同时减少无人机在起飞阶段因需要瞬时大功率的拉力而需要消耗的电量,增加无人机起飞阶段的爬升速率。
2、为实现上述目的,本申请提供了如下方案:
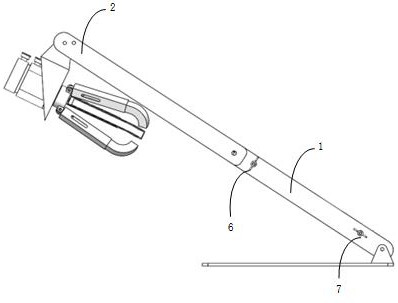
3、基于被动驾驶机器人为无人机起飞助力的弹射机械臂,所述弹射机械臂包括:第一机械主体、第二机械主体、u型滑块、弹性限位装置、弹性元件、第一蝶形卡销、第二蝶形卡销;所述第一机械主体与所述第二机械主体通过所述弹性限位装置配合连接,所述第一机械主体与所述第二机械主体绕所述弹性限位装置转动;所述u型滑块沿所述第一机械主体与所述第二机械主体滑动;所述弹性元件一端与所述u型滑块固定连接;一端与所述第一机械主体端部固定连接;所述第一蝶形卡销和所述第二蝶形卡销用于对所述u型滑块位于所述第一机械主体的不同位置的限位;
4、将所述第一机械主体与所述第二机械主体旋转调节至一条直线,调节所述第一蝶形卡销,滑动所述u型滑块压缩所述弹性元件,调节所述第二蝶形卡销对所述u型滑块进行限位,将无人机固定于所述u型滑块上,调节所述第二蝶形卡销解除所述u型滑块限位,所述u型滑块沿所述第一机械主体和所述第二机械主体快速滑动,将无人机弹射出去。
5、进一步的,所述第一机械主体包括第一翼板,所述第二机械主体包括第二翼板,转动所述第二机械主体,使所述第二翼板与所述第一翼板位于一条直线上,端部相连;所述u型滑块两侧有凹槽,对所述u型滑块上下进行限位,使所述u型滑块沿所述第一翼板和所述第二翼板滑动;所述第一翼板的端部为凹面,所述第二翼板的端部是与所述第一翼板端部配合的凸面,所述第一翼板与所述第二翼板位于一条直线上时,端部互相配合连接,所述第二翼板另一端部有挡板,限制所述u型滑块脱离所述第二翼板。
6、进一步的,所述第一机械主体上部内侧有固定套筒,与所述第一机械主体为一体结构,所述弹性限位装置内嵌至所述套筒内部,与所述套筒内壁固定连接;所述第二机械主体底部连接孔内有一体连接的定位键。
7、进一步的,所述弹性限位装置包括第一弹簧、限位连接件,所述第一弹簧与所述限位连接件固定连接,所述限位连接件外侧有凸台、凸轴,所述凸台低于所述凸轴;所述定位键与所述凸轴配合,使所述第二机械主体绕所述凸轴转动,所述第一机械主体与所述第二机械主体旋转至一条直线上时,所述弹性限位装置弹起,所述定位键位于所述凸台与所述凸轴之间,从而对所述第二机械主体进行限位;压缩所述弹性限位装置,所述凸台低于所述定位键,解除限位。
8、进一步的,所述第一蝶形卡销与所述第二蝶形卡销结构相同,所述第二蝶形卡销包括第二弹簧、蝶形螺母、螺栓轴,所述第二弹簧位于所述螺栓轴一侧,与所述蝶形螺母和所述第一机械主体侧面固定连接,所述第一机械主体侧面与所述蝶形螺母配合处有定位销,所述第二蝶形卡销与所述第一机械主体同一方向时,所述螺栓轴对所述u型滑块进行沿所述第一机械主体方向的限位,所述定位销对所述第二蝶形卡销进行沿所述第一机械主体相反方向的限位,所述第二弹簧对所述第二蝶形卡销进行轴向限位;旋转并轴向拉动所述第二蝶形卡销,解除所述第一机械主体方向的限位。
9、进一步的,所述u型滑块位于第一位置和第二位置,所述第一位置设置于所述第一机械主体上部,所述第二位置设置于所述弹性元件为最大压缩量时所述u型滑块的位置。
10、进一步的,所述第一蝶形卡销对所述u型滑块进行所述第一位置的限位,所述第二蝶形卡销对所述u型滑块进行所述第二位置的限位,无人机弹射过程中,所述第一蝶形卡销和所述第二蝶形卡销皆为解除限位状态。
11、本申请的技术方案的有益效果:
12、本申请的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,使被动驾驶机器人在原有功能的基础上,一机多用,兼有无人机起飞弹射功能,助力无人机起飞。
13、本申请利用路口已有被动机器人的机械臂进行改造,避免了利用无人机在一些复杂路口执勤工作时沉重弹射架不易携带和运输的问题。
14、相对传统的弹簧弹射装置滑道长,所占空间大,本申请可利用机械臂本身的转动折叠,在满足无人机起飞所需滑道长度的基础上,空间占用小,移动方便。
15、本申请中弹性限位装置精准控制机械臂的直线度,更易精准控制和操作。
16、本申请中结构简单,易操作,零件价格便宜,毁坏后易更换,整体成本低,更易普遍应用。
技术特征:1.基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述弹射机械臂包括:第一机械主体、第二机械主体、u型滑块、弹性限位装置、弹性元件、第一蝶形卡销、第二蝶形卡销;所述第一机械主体与所述第二机械主体通过所述弹性限位装置配合连接,所述第一机械主体与所述第二机械主体绕所述弹性限位装置转动;所述u型滑块沿所述第一机械主体与所述第二机械主体滑动;所述弹性元件一端与所述u型滑块固定连接;一端与所述第一机械主体端部固定连接;所述第一蝶形卡销和所述第二蝶形卡销用于对所述u型滑块位于所述第一机械主体的不同位置的限位;
2.根据权利要求1所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述第一机械主体包括第一翼板,所述第二机械主体包括第二翼板,转动所述第二机械主体,使所述第二翼板与所述第一翼板位于一条直线上,端部相连。
3.根据权利要求2所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述u型滑块两侧有凹槽,对所述u型滑块上下进行限位,使所述u型滑块沿所述第一翼板和所述第二翼板滑动。
4.根据权利要求2所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述第一翼板的端部为凹面,所述第二翼板的端部是与所述第一翼板端部配合的凸面,所述第一翼板与所述第二翼板位于一条直线上时,端部互相配合连接,所述第二翼板另一端部有挡板,限制所述u型滑块脱离所述第二翼板。
5.根据权利要求1所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述第一机械主体上部内侧有固定套筒,与所述第一机械主体为一体结构,所述弹性限位装置内嵌至所述套筒内部,与所述套筒内壁固定连接;所述第二机械主体底部连接孔内有一体连接的定位键。
6.根据权利要求5所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述弹性限位装置包括第一弹簧、限位连接件,所述第一弹簧与所述限位连接件固定连接,所述限位连接件外侧有凸台、凸轴,所述凸台低于所述凸轴。
7.根据权利要求6所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述定位键与所述凸轴配合,使所述第二机械主体绕所述凸轴转动,所述第一机械主体与所述第二机械主体旋转至一条直线上时,所述弹性限位装置弹起,所述定位键位于所述凸台与所述凸轴之间,从而对所述第二机械主体进行限位;压缩所述弹性限位装置,所述凸台低于所述定位键,解除限位。
8.根据权利要求1所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述第一蝶形卡销与所述第二蝶形卡销结构相同,所述第二蝶形卡销包括第二弹簧、蝶形螺母、螺栓轴,所述第二弹簧位于所述螺栓轴一侧,与所述蝶形螺母和所述第一机械主体侧面固定连接,所述第一机械主体侧面与所述蝶形螺母配合处有定位销,所述第二蝶形卡销与所述第一机械主体同一方向时,所述螺栓轴对所述u型滑块进行沿所述第一机械主体方向的限位,所述定位销对所述第二蝶形卡销进行沿所述第一机械主体相反方向的限位,所述第二弹簧对所述第二蝶形卡销进行轴向限位;旋转并轴向拉动所述第二蝶形卡销,解除所述第一机械主体方向的限位。
9.根据权利要求1所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述u型滑块位于第一位置和第二位置,所述第一位置设置于所述第一机械主体上部,所述第二位置设置于所述弹性元件为最大压缩量时所述u型滑块的位置。
10.根据权利要求9所述的基于被动驾驶机器人为无人机起飞助力的弹射机械臂,其特征在于,所述第一蝶形卡销对所述u型滑块进行所述第一位置的限位,所述第二蝶形卡销对所述u型滑块进行所述第二位置的限位,无人机弹射过程中,所述第一蝶形卡销和所述第二蝶形卡销皆为解除限位状态。
技术总结本申请公开了一种基于被动驾驶机器人为无人机起飞助力的弹射机械臂,弹射机械臂包括:第一机械主体、第二机械主体、U型滑块、弹性限位装置、弹性元件、第一蝶形卡销、第二蝶形卡销;将第一机械主体与第二机械主体旋转调节至一条直线,调节第一蝶形卡销,滑动U型滑块压缩弹性元件,调节第二蝶形卡销对U型滑块进行限位,将无人机固定于U型滑块上,调节第二蝶形卡销解除U型滑块限位,U型滑块沿第一机械主体和第二机械主体快速滑动,将无人机弹射出去。使被动驾驶机器人在原有功能的基础上,兼有无人机起飞弹射功能,助力无人机起飞;能精准控制机械臂的直线度,更易控制和操作;结构简单,价格便宜,毁坏后易更换,成本低,更易普遍应用。技术研发人员:王士元,王川受保护的技术使用者:维特瑞交通科技有限公司技术研发日:20230912技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240722/221445.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种连接装置的制作方法
下一篇
返回列表