一种苗情和病虫害预警巡逻无人机及方法与流程
- 国知局
- 2024-08-01 05:50:28
本发明涉及病虫害监测,具体为一种苗情和病虫害预警巡逻无人机及方法。
背景技术:
1、病虫害是病害和虫害的并称,常对农、林、牧业等造成不良影响,其中虫害是由各种有害昆虫引起的植物受害现象,这些昆虫通过口器咬食、吸取植物汁液、卵和幼虫寄生等方式,导致植物出现叶片凋落、残缺、受损等,导致农作物无法满足市场需求,进而降低农作物的市场价值。
2、为了不影响农作物的生长和发育,在农作物生长过程中,首先会通过物理手段,例如使用隔离网来隔离害虫,防止害虫的入侵,并且还会安排专业的人员进行巡检,通过识别农作物外观的观察和分析,以便及时发现和处理问题,使农民或专业人员能够及时采取措施来控制病虫害的传播和影响;
3、但是尽管使用隔离网隔离害虫并配合人工巡检是一种有效的方法,但其需要大量的时间和人力资源,尤其是对于大规模的农田或森林,此外,人为因素可能会导致巡检的不一致性和主观性,从而影响到检测结果的可靠性,并且当发现农田内存在病虫害时,通常会使用无人机喷洒杀虫药对害虫进行灭杀,但是无人机在喷洒杀虫药的过程中,会受到环境因素的影响,从而导致杀虫药出现损失,进而导致杀虫效果降低的情况出现。
技术实现思路
1、本发明的目的在于提供一种苗情和病虫害预警巡逻无人机及方法,解决以下技术问题:
2、如何准确的评估病虫害情况并实现精准投放杀虫药的量。
3、本发明的目的可以通过以下技术方案实现:
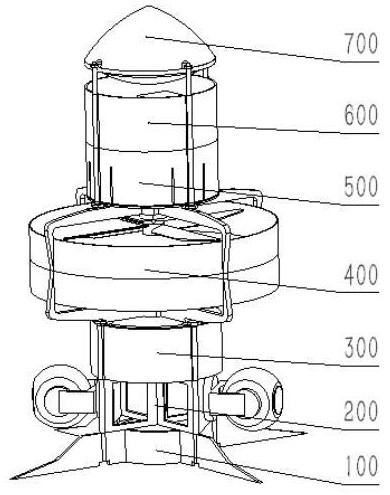
4、一种苗情和病虫害预警巡逻无人机及方法,包括底座、设置在底座顶部的摄像机模块;
5、其特征在于,还包括:数据采集模块和设置在摄像机模块顶部的数据处理模块,所述数据处理模块包括处理器安装壳;
6、述数据采集模块将获取的环境信息数据发送给所述数据处理模块,所述数据处理模块根据环境信息数据对杀虫剂的喷洒计量进行调整;
7、动力模块,设置在数据处理模块外壳上方,用于驱动无人机飞行;
8、电源模块,设置在动力模块上方,用于为无人机提供电源;
9、机顶盖,设置在数据采集模块上方,用于提高无人机的信号。
10、进一步的,所述摄像机模块包括:
11、摄像头支架,设置在底座顶部;
12、高清摄像头和红外摄像头,所述高清摄像头和红外摄像头均固定连接在摄像头支架外壁;
13、所述数据处理模块还包括:
14、数据处理器和处理器支架;
15、所述处理器支架固定连接在处理器安装壳内部;
16、所述数据处理器固定连接在处理器支架顶部;
17、处理器安装壳固定连接在摄像头支架顶部,
18、所述动力模块包括:
19、安装架,设置在处理器安装壳顶部;
20、第一螺旋桨与第二螺旋桨,所述第一螺旋桨与第二螺旋桨均固定连接在安装架内;
21、所述第一螺旋桨与第二螺旋桨输出轴均与电机固定连接。
22、进一步的,所述电源模块包括:
23、电源外壳,设置在安装架顶部;
24、多组电源安装座内,多组所述电源安装座内均固定连接在电源外壳内;
25、多组电池包,分别设置在多组电源安装座内;
26、所述数据采集模块包括:
27、连接壳,设置在电源外壳顶部;
28、数据采集支架,所述数据采集支架固定连接在连接壳内;
29、卫星定位模块以及环境信息采集模块,设置在数据采集支架顶部;
30、所述机顶盖包括:
31、盖体,固定连接在连接壳顶部;
32、模块连接条,固定连接在盖体底部;
33、信号天线,设置在模块连接条底部。
34、进一步的,一种苗情和病虫害预警巡逻的方法,其特征在于,通过上述权利要求1-3中任意一种苗情和病虫害预警巡逻无人机进行巡逻,所述方法包括:
35、s1:训练与测试数据准备:开启巡逻无人机并通过高清摄像头或红外摄像头采集图片信息,并进行姿态解算;
36、s2:病虫害区域智能分析:通过测量受感染区域的面积、数量和分布等参数来量化受感染的程度;
37、s3:自动处理:识别到的病虫害区域通过智能分析后,发出警报,将可视化数据发送给后台农田管理人员,并自动根据病虫害程度发送喷药指令。
38、若病虫害的整体风险度大于预设的病虫害风险度,判断存在病虫害,随后会对病虫害的数据进行通过智能分析并上传,之后数据处理模块会发出警报提示管理员,发送喷药指令,之后自动根据病虫害风险度控制杀虫药剂量。
39、进一步的,所述s2中病虫害区域智能分析的过程包括:
40、通过摄像机模块对受感染区域的面积、数量以及分布等参数进行采集,并根据采集数据对该区域内的病虫害风险度进行计算,并通过识别病虫害类型和影响等特征,对病虫害的整体风险度进行计算,生成可视化数据报告。
41、进一步的,所述s2中病虫害区域智能分析的过程还包括;
42、通过将病虫害的整体风险度与预设的病虫害风险度阈值进行比对;
43、若病虫害的整体风险度小于预设的病虫害风险度,判断不存在病虫害;
44、若病虫害的整体风险度大于预设的病虫害风险度,判断存在病虫害,随后会对病虫害的数据进行通过智能分析并上传,之后数据处理模块会发出警报提示管理员,发送喷药指令,之后自动根据病虫害风险度控制杀虫药剂量。
45、进一步的,所述s3中的自动处理过程包括:
46、通过数据采集模块中的环境信息采集模块对受感染区域的环境信息进行采集,其中环境信息包括空气湿度,空气温度以及风速,之后根据采集到的环境信息对无人机在喷洒杀虫药剂时的杀虫药损失系数进行计算,生成可视化数据报告。
47、进一步的,所述s3中的自动处理过程还包括;
48、通过将杀虫药损失系数与预设的损失系数阈值进行比对:
49、若杀虫药损失系数小于预设的损失系数阈值,判断在喷洒杀虫药时不会受到环境因素的影响,不需要调整杀虫药剂量;
50、若杀虫药损失系数大预设的损失系数阈值,判断在进行喷洒杀虫药作业时会受到环境因素的影响,需要对杀虫药的剂量进行调整。
51、进一步的,所述s3中的自动处理过程还包括:
52、当判断在喷洒杀虫药时会受到环境因素的影响时;
53、通过数据处理器根据杀虫药损失系数计算得出在喷洒杀虫药时杀虫药的损失量,并根据喷洒杀虫药时杀虫药的损失量计算得出调整后的杀虫药剂量。
54、进一步的,所述s1中的姿态解算过程包括:
55、s11:通过下载网上公开病虫害数据集和采集农田病虫害照片,两类图像共计n张;
56、s12:数据标注:使用标注软件labelimg对获取的病虫害区域数据集进行标注;
57、s13:数据处理:将标注数据样本按照8:1:1划分为训练集、验证集、测试集;
58、s14:网络结构设计:采用yolov5算法,将数据样本作为输入层,随后经过一系列卷积层,用于提取图像中的特征;
59、s15:模型训练:在训练集上进行模型训练,通过将图像数据输入模型中并计算损失函数,然后使用反向传播算法更新模型参数;
60、s16:模型部署:将模型部署到实际环境中,将其集成到应用程序、网站或其他系统中,以进行实时病虫害监测。
61、本发明的有益效果:
62、(1)本发明通过无人机在飞行过程中多个区域的农田进行拍摄,从而获取发生病虫害的区域位置、面积、病虫害程度等信息,之后根据该信息判断该农田中各个区域内的病虫害状况,若判断病虫害情况较为严重,则发出警报提示管理员,并将杀虫药剂喷洒器安装在无人机上进行喷药作业,通过如此设置,可以实现对大规模的农田或森林的巡逻作业,并且不会因为人为因素导致巡检的不一致性和主观性,提高了检测结果的准确性,并且在正确的位置投放正确的杀虫剂的量,保证杀虫效果。
63、(2)本发明通过无人机内的数据采集模块对发生病虫害区域位置附近的环境信息进行收集,并计算获得调整后的杀虫药剂量,数据处理单元会将该信息传送给后台农田管理人员,后台农田管理人员只需要使用无人机根据调整后的杀虫药剂量进行喷洒,即可将受污染区域内的害虫灭杀,通过如此设置,可以准确的计算出调整后的杀虫药剂量,不仅可以避免杀虫药投加量不足导致影响杀虫效果的情况出现,并且可以避免人工凭经验确定调整后的投加量,导致投加量过剩对农作物产生危害的情况出现,从而保证农作物以及树木的良好生长。
64、(3)本发明,通过将所有区域内病虫害的整体风险度分别与预设的病虫害风险度阈值 进行比对,可以根据区域内的病虫害的整体风险度的高低,对该区域的病虫害的情况进行判断,从而实现对大规模的农田或森林的病虫害情况进行实时监测,保证农田或森林受到较严重的病虫害时可以第一时间进行喷药杀虫处理,进而提高农作物和树木生长发育的效果。
65、(4)本发明通过构建一种常见作物病虫害监测模型,随后在训练集上进行模型训练,通过将图像数据输入模型中并计算损失函数,然后使用反向传播算法更新模型参数,使用验证集对模型进行验证,监控模型的性能并调整超参数,防止过拟合,最后通过测试集最后进行测试,并在测试完成后,将模型部署到实际环境中,将其集成到应用程序、网站或其他系统中,以进行实时病虫害监测。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221669.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种推进装置的制作方法
下一篇
返回列表