一种应用于综合管廊的基于MESH网络的智能巡检无人机
- 国知局
- 2024-08-01 05:53:00
本发明涉及一种智能巡检救灾无人机,具体涉及到一种基于mesh网络连接技术,应用于综合管廊智能巡检和救灾抢险中的智能巡检无人机。
背景技术:
1、综合管廊的巡检工作是电力系统中最具代表的工作难点之一,电力设备、设施相关的机器能否正常运行关乎着电力系统正常运作的安全稳定问题。随着我国综合管廊的高速发展,线路巡检工作面临着巡检难度大、巡检所需时间长、所处环境多变且部分线路恶劣、巡检数据多样复杂、高度依赖专业人员等问题。通过专业人员定期巡检,如果发现各种问题,则及时着手处理,避免问题扩大化,人工巡检任务量大且人主观因素的影响往往容易导致巡检结果的可靠性降低,这种低效高成本的巡检方式已经跟不上新时代电力系统的发展和需求。
2、通过智能巡检救灾无人机,工作人员可以及时发现线路中设备和设施本体环境温度异常、安排检修维护,及时消除线路中存在的安全隐患。智能巡检救灾无人机的推广和应用减少了工作人员高强度周期性的运检要求,通过巡检无人机搭建的各种传感器提供的各种检测手段,实时检测综合管廊中设备设施的运行状态,在一些极端恶劣甚至极易发生危险的环境中,有效防止人身事故。
3、传统的巡检无人机传输摄像头视频信息采用的是传统wifi形式或者是巡检完后再上传数据信息,在距离较远且环境恶劣的环境中存在断裂失联风险,无法保证视频信号的可靠实时传递。
技术实现思路
1、为了克服上述现有技术的缺点,本发明的目的在于提供一种应用于综合管廊的基于mesh网络的智能巡检救灾无人机,该智能巡检救灾无人机的报警效果较好,信息传输稳定实时,同时具备自我修复节点功能,适应性较强。
2、为达到上述目的,本发明采用如下技术方案:
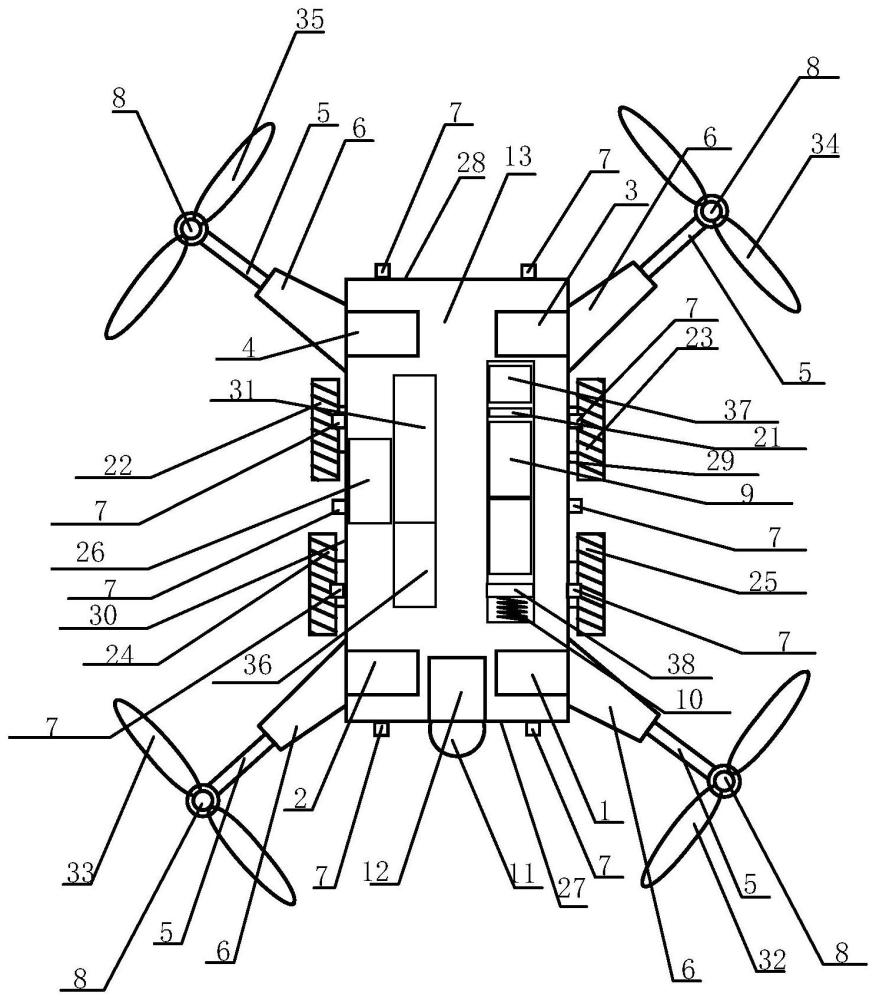
3、一种应用于综合管廊的基于mesh网络的智能巡检无人机,包括巡检无人机本体,设置于巡检无人机本体的前侧、后侧、左侧和右侧的烟雾传感器7,设置于巡检无人机本体前侧的三维定位传感器19和雾灯11,设置于巡检无人机本体上的红外摄像头12、实景摄像头20、机械臂6、mesh网络中转设备9、步进电机37、推板21、压缩弹簧10、挡板38和用于提供电能的电池组26,设置于巡检无人机本体上的四个麦克纳姆轮和四个机械臂6,通过螺旋桨固定器8和伸缩臂5与四个机械臂6分别连接的螺旋桨;与伸缩臂5和四个螺旋桨分别连接的四个直流驱动电机,与四个麦克纳姆轮分别连接的四个直流驱动电机;设置在巡检无人机本体上的中心控制器31与mesh网络中转设备9、烟雾传感器7的输出端、三维定位传感器19的输出端、螺旋桨固定器8的调节端、红外摄像头12的输出端、电池组26的输出端及八个直流驱动电机的控制端相连接;步进电机37上固定有推板21,压缩弹簧10与挡板38固定连接,mesh网络中转设备9设置在推板21与挡板38之间;mesh网络中转设备9与铺设在管廊中的mesh节点之间组成mesh通信网络,该网络能满足无人机与地面之间实时通信的要求;无人机在飞行巡检时,通过铺设在管廊内部的mesh节点进行三维坐标定位,以便在无人机偏离路线时修正。
4、所述中心控制器31通过mesh通信模块36与mesh网络中转设备9和上位机相连接。
5、所述巡检无人机本体包括顶板13和底板14;机械臂6安装于顶板13上,与伸缩臂5和四个螺旋桨分别连接的四个直流驱动电机安装于顶板13上;四个麦克纳姆轮以及分别与四个麦克纳姆轮连接的四个直流驱动电机安装于底板14上,实景摄像头20设置于底板13上。
6、所述无人机在飞行巡检时,通过铺设在管廊内部的mesh节点进行三维坐标定位,以便在无人机偏离路线时修正,具体步骤如下:
7、步骤1.在管廊内部铺设的mesh节点发出信号,该信号的传播速度已知;
8、步骤2.搭载在无人机上的mesh网络中转设备9接收到mesh节点发出的信号后,计算出信号从管廊内部的mesh节点传播到无人机上的时间;
9、步骤3.根据传播速度和传播时间,计算出无人机到管廊内部mesh节点之间的相对距离;
10、步骤4.利用三边测量法,结合相对距离和已知的mesh节点位置,计算出无人机的三维坐标信息;
11、步骤5.利用三维坐标信息对无人机的巡检路线进行校正。
12、步骤5中利用三维坐标信息对无人机的巡检路线进行校正,采用knn算法进行优化,具体如下:
13、首先,搜寻特征匹配点,建立无人机实际位置和三边测量法计算的无人机位置之间的特征点对;
14、其次,通过寻找无人机实际定位区域中对三边测量法计算结果值影响最大的k个参考节点,并依据不同参考节点对无人机实际位置的影响程度,对参考节点坐标进行加权处理,使其尽可能接近无人机实际的位置坐标;
15、当三边测量法计算位置坐标在定位区域内时,其与k个参考节点到三边测量法计算坐标之间的欧式距离的计算公式为:
16、
17、式中d为参考节点到三边测量法计算坐标之间的欧式距离,k为参考节点数,mi为第i个参考节点信息,m为三边测量法的计算坐标位置信息;
18、采用加权因子对欧氏距离进行优化,使得三边测量法的计算坐标与无人机实际坐标的距离尽可能小,设第i个参考节点到三边测量法计算坐标的距离为di,则加权因子δi表示为:
19、
20、通过knn算法,不同的加权因子反映了不同参考节点对无人机实际坐标的影响不同,通过加权因子δi的引入使得最终参考点坐标逼近无人机实际坐标,最终参考点表示为:
21、
22、其中,为knn算法加权等效的无人机实际坐标的参考点坐标,pi为每个参考点的坐标。
23、无人机上搭载的烟雾传感器7检测到综合管廊内的烟雾气体信息,中心控制器31通过烟雾传感器7采集现场烟雾气体信息,一旦发现烟雾,中心控制器31通过搭载在无人机下方的可转动实景摄像头20及红外摄像头12采集现场视频信息以及温度信息,再通过mesh通信模块36利用mesh网络将采集到的视频信息以及温度信息发送至上位机,以便远程操控人员观看到隧道内的实时视频并做出相应的操作。
24、搭载在无人机下方的实景摄像头20和红外摄像头12能够实时采集综合管廊中的视频信息,并发送至上位机;当上位机的自动火焰识别程序发现视频中存在火源信息,同时烟雾传感器7和红外摄像头12检测到异常时,则立即发出报警信息,远程运维人员通过无人机上的mesh网络中转设备9与铺设在综合管廊中的定位mesh节点的三维定位坐标获得火灾地点的位置信息。
25、所述无人机上设置有机载备用mesh节点。
26、所述mesh通信网络采用分层分布式的mesh网络架构,实现管廊内网络信号传输稳定和顺畅;该分层分布式的mesh网络架构由多个网络层级组成,每个网络层级由多个mesh网络路由器组成,形成了一个分布式的网络拓扑结构;在这种网络中,每个层级中的路由器都具有数据接发和网络管理的功能,能够独立地管理和维护该级网络的路由表,并通过与其他mesh路由器的连接,实现数据信息接发功能。
27、所述分层分布式mesh网络拓扑结构能够进行自动补盲工作和具备自组织自恢复功能。
28、本发明具有以下有益效果:
29、在具体操作中,中心控制器通过烟雾传感器获取到环境中的烟雾气体含量信息,一旦检测到烟雾着火信息时,中心控制器通过摄像头和红外传感器采集现场的视频信息,然后通过mesh网络中转设备发送至远程的上位机中。这样,远程操作人员可以实时观看隧道内的视频,同时可以通过mesh网络中转设备向中心控制器发送命令,以实现对中心控制器的控制。此外,中心控制器通过温度传感器获取环境中的温度情况,并根据温度传感器获取的环境中的温度变化情况来判断设备设施是否着火。一旦检测到着火,中心控制器会触发报警。同时,通过三维定位传感器,固定mesh节点与巡检无人机本体之间的距离被获取,然后通过三边定位的方法获取无人机的位置。在上述操作中,中心控制器不断校准无人机的巡检路线,以确保准确的巡检结果。所采用的分层分布式mesh网络架构覆盖范围广,易于部署mesh网络节点,保证数据信息的稳定传输。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221880.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表