一种基于太阳光压的自主卸载动量轮角动量的方法与流程
- 国知局
- 2024-08-01 06:00:41
本发明属于深空探测控制领域,特别涉及一种基于太阳光压的自主卸载动量轮角动量的方法。
背景技术:
1、在深空探测任务的整个任务期间,探测器需要经历长达数年的对日巡航飞行。在巡航对日期间,主要受到的干扰力矩为光压力矩,该干扰力矩被动量轮吸收,一般数天后可能导致动量轮饱和。若采用喷气方式对动量轮进行卸载,在长时间巡航转移飞行过程中会造成可观的燃料消耗;另外一方面,采用喷气卸载角动量也不利于对探测器的地面测定轨工作。
2、为了解决上述问题,针对太阳翼采用双轴太阳翼驱动机构(sada)的情形,本发明设计了利用太阳光压自主卸载动量轮角动量的方案,依靠角动量的反馈进行双轴sada转角的自主调整,可实现长时间无喷气自主卸载。
技术实现思路
1、本发明所解决的问题是:针对深空巡航过程中采用双轴sada的探测器长时间对日容易因为光压干扰力矩导致动量轮饱和的问题,提出了一种基于太阳光压的自主卸载动量轮角动量的方法,可以实现长时间无喷气自主卸载,避免喷气卸载动量轮角动量导致的燃料额外消耗。
2、本发明提供的技术方案如下:
3、第一方面,一种基于太阳光压的自主卸载动量轮角动量的方法,包括:
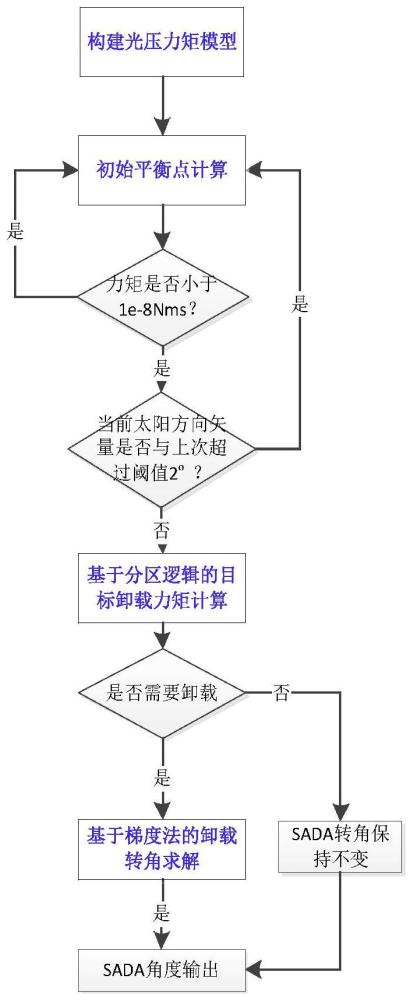
4、建立采用双轴sada的探测器的光压力矩模型;
5、根据太阳入射角约束以及双轴sada的转角范围约束,并利用探测器的光压力矩模型,确定太阳翼初始平衡角,所述太阳翼初始平衡角为光压力矩为零时太阳翼的双轴sada转角;
6、在控制太阳翼处于初始平衡角后,每隔设定时间判断当前时刻与上次太阳翼处于初始平衡角时刻的太阳方向矢量变化是否超过设定阈值,若探测器的太阳方向矢量变化超过设定阈值,则根据当前时刻太阳方向矢量重新确定太阳翼初始平衡角,并获取动量轮角动量;若探测器的太阳方向矢量变化未超过设定阈值,则获取动量轮角动量;
7、根据角动量分量分区阈值,确定滚动轴、俯仰轴和偏航轴上的角动量分量所处分区,并根据分区结果确定相应轴上的目标光压力矩;
8、根据滚动轴、俯仰轴和偏航轴上的目标光压力矩,采用梯度下降法确定sada目标转角。
9、第二方面,一种基于太阳光压的自主卸载动量轮角动量的装置,包括:
10、第一模块,用于建立采用双轴sada的探测器的光压力矩模型;
11、第二模块,用于考虑太阳入射角约束以及双轴sada的转角范围约束,并利用探测器的光压力矩模型,确定光压力矩为零时太阳翼的双轴sada转角即太阳翼初始平衡角;
12、第三模块,用于在控制太阳翼处于初始平衡角后,每隔设定时间判断当前时刻与上次太阳翼处于初始平衡角时刻的太阳方向矢量变化是否超过设定阈值,若探测器的太阳方向矢量变化超过设定阈值,则根据当前时刻太阳方向矢量重新确定太阳翼初始平衡角,并获取动量轮角动量,启动第四模块;若探测器的太阳方向矢量变化未超过设定阈值,则获取动量轮角动量,启动第四模块;
13、第四模块,用于根据角动量分量分区阈值,确定滚动轴、俯仰轴和偏航轴上的角动量分量所处分区,并根据分区结果确定相应轴上的目标光压力矩;
14、第五模块,用于根据滚动轴、俯仰轴和偏航轴上的目标光压力矩,采用梯度下降法确定sada目标转角。
15、第三方面,一种基于太阳光压的自主卸载动量轮角动量的设备,包括:
16、一个或多个处理器;
17、存储装置,用于存储一个或多个程序,
18、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实施前述所述的一种基于太阳光压的自主卸载动量轮角动量的方法。
19、第四方面,一种可读存储介质,其上存储有计算机程序,该程序被处理器执行时实施前述所述的一种基于太阳光压的自主卸载动量轮角动量的方法。
20、根据本发明提供的一种基于太阳光压的自主卸载动量轮角动量的方法,具有以下有益效果:
21、(1)本发明提供的一种基于太阳光压的自主卸载动量轮角动量的方法,根据太阳入射角约束以及双轴sada的转角范围约束,并利用探测器的光压力矩模型,确定太阳翼初始平衡角;并在控制太阳翼处于初始平衡角后,每隔设定时间判断当前时刻与上次太阳翼处于初始平衡角时刻的太阳方向矢量变化是否超过设定阈值,基于此进行双轴sada转角调整;采用初始平衡角可以尽量抑制探测器在飞行过程中太阳光压的累积速度。
22、(2)本发明提供的一种基于太阳光压的自主卸载动量轮角动量的方法,考虑到系统参数偏差的影响,为提高控制的鲁棒性和尽量减少sada转角的调整次数,根据角动量分量分区阈值,确定滚动轴、俯仰轴和偏航轴上的角动量分量所处分区,滚动轴、俯仰轴和偏航轴上的角动量分量处于死区时不进行sada转角的调整;并根据分区结果确定相应轴上的目标光压力矩,通过调整sada转角产生所需要的目标光压力矩,可以有效抑制并减小探测器的角动量。
23、(3)本发明提供的一种基于太阳光压的自主卸载动量轮角动量的方法,通过光压卸载可避免角动量卸载所消耗的燃料,对提高卫星寿命具有重要作用,可应用于深空探测中采用双轴sada的探测器长时间对日巡航,也可以应用到近地轨道卫星的对日姿态控制。
技术特征:1.一种基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,包括:
2.根据权利要求1所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述建立采用双轴sada的探测器的光压力矩模型的步骤中,光压力矩模型为:
3.根据权利要求2所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述根据太阳入射角约束以及双轴sada的转角范围约束,并利用探测器的光压力矩模型,确定太阳翼初始平衡角的步骤,包括:
4.根据权利要求1所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述在控制太阳翼处于初始平衡角后,每隔设定时间判断当前时刻与上次太阳翼处于初始平衡角时刻的太阳方向矢量变化是否超过设定阈值的步骤中,所述设定阈值为1.5°~2.5°。
5.根据权利要求1所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述根据角动量分量分区阈值,确定滚动轴、俯仰轴和偏航轴上的角动量分量所处分区,并根据分区结果确定相应轴上的目标光压力矩的步骤,包括:根据主动卸载区阈值和死区阈值,确定滚动轴、俯仰轴和偏航轴上的角动量分量所处分区;
6.根据权利要求5所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述滚动轴、俯仰轴或偏航轴上的角动量分量处于主动卸载区时,目标光压力矩确定为:
7.根据权利要求1所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述滚动轴、俯仰轴或偏航轴上的角动量分量处于抗滑移区时,目标光压力矩确定为:
8.根据权利要求1所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述滚动轴、俯仰轴或偏航轴上的角动量分量处于死区时,相应轴上的目标光压力矩为零。
9.根据权利要求1所述的基于太阳光压的自主卸载动量轮角动量的方法,其特征在于,所述根据滚动轴、俯仰轴和偏航轴上的目标光压力矩,采用梯度下降法确定sada目标转角的步骤,包括:
10.一种基于太阳光压的自主卸载动量轮角动量的装置,其特征在于,包括:
技术总结本发明提供了一种基于太阳光压的自主卸载动量轮角动量的方法,包括:建立采用双轴SADA的探测器的光压力矩模型;根据太阳入射角约束以及双轴SADA的转角范围约束,并利用探测器的光压力矩模型,确定太阳翼初始平衡角;在控制太阳翼处于初始平衡角后,每隔设定时间判断当前时刻与上次太阳翼处于初始平衡角时刻的太阳方向矢量变化是否超过设定阈值,若超过设定阈值,则根据当前时刻太阳方向矢量重新确定太阳翼初始平衡角,并获取动量轮角动量;若未超过设定阈值,则获取动量轮角动量;根据角动量分量分区阈值,确定三轴上的角动量分量所处分区,并根据分区结果确定相应轴上的目标光压力矩;根据三轴上的目标光压力矩,采用梯度下降法确定SADA目标转角。本发明通过光压卸载可避免动量轮角动量的喷气卸载所消耗的燃料,对提高卫星寿命具有重要作用,可应用于深空探测中采用双轴SADA的探测器长时间对日巡航,也可以应用到近地轨道卫星的对日姿态控制。技术研发人员:胡锦昌,刘一武,徐超,胡少春,李志平,唐青原,顾朋,张莹莹,陈尧,孟雅哲受保护的技术使用者:北京控制工程研究所技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/222399.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种新型离子推进装置
下一篇
返回列表