一种多维作业的勘测无人机的制作方法
- 国知局
- 2024-08-01 06:06:20
本技术涉及勘测无人机,具体为一种多维作业的勘测无人机。
背景技术:
1、无人机作为一种集成了信息技术、航空技术等技术的多元化平台,其在狭窄空间或复杂地形中具有较高的灵活性、稳定性和精确性,且便于携带和运输,具有可定制性强、易操控、低成本等特点。多维作业勘测无人机是一种能够在多个维度内执行作业任务的无人机,如对地形地貌、地质构造等数据的采集,在有限空间内的勘测或高处作业等,且在地下矿井等部分有限空间内往往伴随着比较恶劣的环境条件,使用该无人机进行环境内部信息的检测、分析,以及与相关地面作业平台的协同作业,能降低人员伤亡风险,提高工作效率。为此,我们提出一种多维作业的勘测无人机。
技术实现思路
1、本实用新型的目的在于提供一种多维作业的勘测无人机,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种多维作业的勘测无人机,包括无人机主体,其特征在于:所述无人机主体的内部安装有主控模组,所述主控模组包括但不限于无人机主控、磁罗盘、imu惯性测量单元、雷达模组、维稳传感模组块、监测模组、视觉模组、通信模组、传输模组和外围可扩展无人机机载模组功能控制的数据处理模组,所述无人机主体的上方表面安装有无人机电源,所述无人机主体的下端表面连接有机械臂,所述机械臂的前端可搭载多种作业钳口。
3、优选的,所述无人机主体为多旋翼无人机,所述无人机主体的表面连接有避障雷达,所述避障雷达位于机体和每组旋翼的内侧连接处。
4、优选的,所述无人机主体的表面安装有外壳,所述无人机主体的外壳表面均覆盖有疏水涂层,所述无人机主体的外壳内设置有夹层且夹层内设有保温材料。
5、优选的,所述无人机主体的底部安装有起落架,所述起落架上连接有弹簧液压减震和收起装置。
6、优选的,所述雷达模组包括安装在无人机主体上端表面的向上雷达。
7、优选的,所述监测模组包含但不仅限于温度检测传感器、湿度检测传感器、气体检测传感器、气压检测传感器以及超声波传感器,所述气体检测传感器包括但不限于氧气检测器、二氧化硫检测器、一氧化碳检测器、氨气检测器、氮氧化物检测器。
8、优选的,所述通信模组包括但不限于数传/图传模块、卫星通信模块、移动设备通信模块、导航与定位模块。
9、优选的,所述传输模组包括安装在无人机主体上端表面的天线,所述天线设置为两组并位于主控模组的两侧,两组所述天线分别为图传/数传天线和gnss天线。
10、优选的,所述视觉模组包括连接在无人机主体下表面前端连接有机械云台,所述机械云台上安装有视觉设备,所述视觉设备包括但不限于多目深度相机。
11、优选的,所述机械臂为多自由度机械臂,所述机械臂的作业钳口包括但不限于金属爪钳、自适应柔性爪钳、平行机械爪钳、焊接作业口、清洁作业口,所述机械臂可搭载的作业模组包括但不限于测绘模组,所述测绘模组包括但不仅限于激光雷达、测距仪器、物体长度测量仪器、摄像器。
12、与现有技术相比,本实用新型的有益效果是:本装置其可以进入有限空间内进行作业,如地下矿井、隧道等,进行隧道结构、形变趋势、空间内的环境状况等数据的采集、分析和测量,以及空间内高处基础设施的巡检、维修和清洁;还可以快速、高效地对较大范围地形地貌、地质构造进行勘测、航拍摄影;对高压输电线路、油田、森林火情进行巡查;应用于农业植保、物流运输、城市规划管理和灾难救援等。本装置设计具有一定的可靠性、维护性和安全性。且有与相关地面作业机器人进行协同作业的能力,提高工作效率的同时避免了人员工作时的危险和不便。
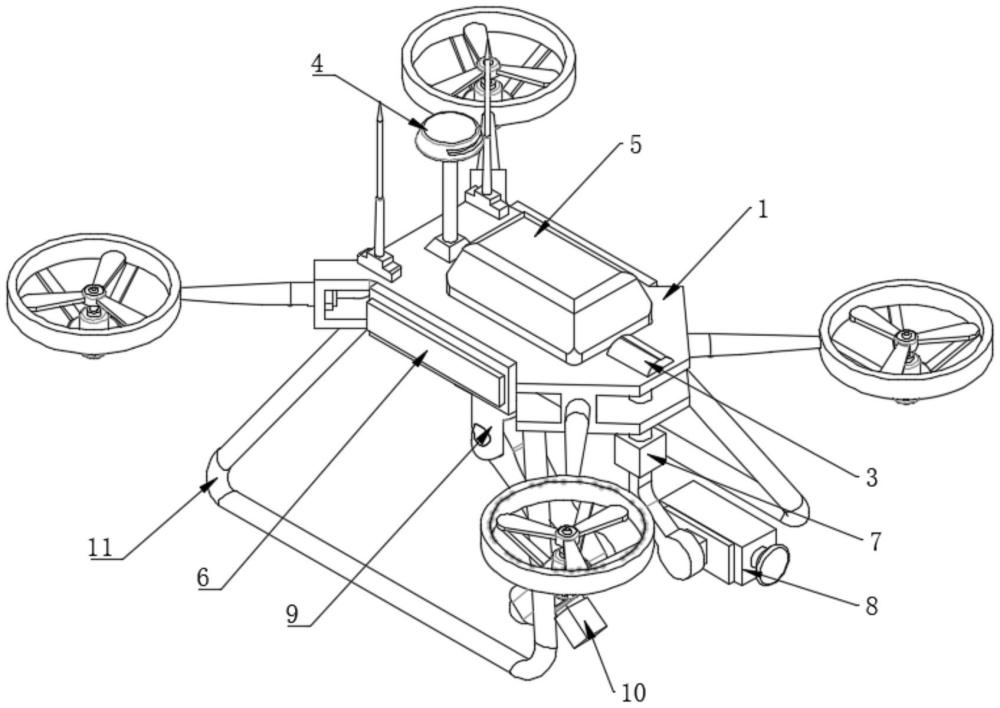
技术特征:1.一种多维作业的勘测无人机,包括无人机主体(1),其特征在于:所述无人机主体(1)的内部安装有主控模组(2),所述主控模组(2)包括但不限于无人机主控、磁罗盘、imu惯性测量单元、雷达模组、维稳传感模组块、监测模组、视觉模组、通信模组、传输模组和外围可扩展无人机机载模组功能控制的数据处理模组,所述无人机主体(1)的上方表面安装有无人机电源(5),所述无人机主体(1)的下端表面连接有机械臂(9),所述机械臂(9)的前端可搭载多种作业钳口。
2.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述无人机主体(1)为多旋翼无人机,所述无人机主体(1)的表面连接有避障雷达(6),所述避障雷达(6)位于机体和每组旋翼的内侧连接处。
3.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述无人机主体(1)的表面安装有外壳,所述无人机主体(1)的外壳表面均覆盖有疏水涂层,所述无人机主体(1)的外壳内设置有夹层且夹层内设有保温材料。
4.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述无人机主体(1)的底部安装有起落架(11),所述起落架(11)上连接有弹簧液压减震和收起装置。
5.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述雷达模组包括安装在无人机主体(1)上端表面的向上雷达(3)。
6.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述监测模组包含但不仅限于温度检测传感器、湿度检测传感器、气体检测传感器、气压检测传感器以及超声波传感器,所述气体检测传感器包括但不限于氧气检测器、二氧化硫检测器、一氧化碳检测器、氨气检测器、氮氧化物检测器。
7.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述通信模组包括但不限于数传/图传模块、卫星通信模块、移动设备通信模块、导航与定位模块。
8.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述传输模组包括安装在无人机主体(1)上端表面的天线(4),所述天线(4)设置为两组并位于主控模组(2)的两侧,两组所述天线(4)分别为图传/数传天线和gnss天线。
9.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述视觉模组包括连接在无人机主体(1)下表面前端连接有机械云台(7),所述机械云台(7)上安装有视觉设备(8),所述视觉设备(8)包括但不限于多目深度相机。
10.根据权利要求1所述的一种多维作业的勘测无人机,其特征在于:所述机械臂(9)为多自由度机械臂,所述机械臂(9)的作业钳口包括但不限于金属爪钳、自适应柔性爪钳、平行机械爪钳、焊接作业口、清洁作业口,所述机械臂(9)可搭载的作业模组包括但不限于测绘模组(10),所述测绘模组(10)包括但不仅限于激光雷达、测距仪器、物体长度测量仪器、摄像器。
技术总结本技术公开了勘测无人机技术领域的一种多维作业的勘测无人机,包括无人机主体,所述无人机主体的上端表面安装有主控模组,所述主控模组包括但不限于无人机主控、磁罗盘、IMU惯性测量单元、雷达模组、维稳传感模组块、监测模组、视觉模组、通信模组、传输模组和外围可扩展无人机机载模组功能控制的数据处理模组;本装置可以完成对地形地貌、地质构造等数据的采集、拍摄和分析,部分场景的检查、应急救援等多种维度作业任务,如有限空间内作业,完成对隧道结构、形变趋势空间内的环境状况等数据的测量和融合,高处基础设施的巡检、维修和清洁等。且有与相关地面作业机器人进行协同作业的能力,提高工作效率的同时避免人员工作时的危险和不便。技术研发人员:石隆轩,张浩波,何井洋,徐炜受保护的技术使用者:海克斯康测绘与地理信息系统(青岛)有限公司技术研发日:20231101技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/222727.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表