一种无人机机械振动测试装置的制作方法
- 国知局
- 2024-08-01 06:08:09
本发明属于无人机检测设备领域,尤其涉及一种无人机机械振动测试装置。
背景技术:
1、无人机是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器。目前,随着科技的发展,无人机技术日趋成熟,无人机以其速度快、操作灵活的特点被广泛应用。民用领域中,地图测绘无人机、地质勘测无人机、灾害监测无人机、气象探测无人机、空中交通管制无人机、边境控制无人机、通信中继无人机、农药喷洒无人机、救援无人机的研究和应用在国内外都在不断的发展中。
2、由于无人机内部有很多的传感器,当传感器因为振动受到影响时,会导致飞行器不受控制;其次,无人机内部硬件结构复杂,机身的一体化强度要求较高,如果振动导致硬件连接异常,螺丝或者模块松动等等,都会导致无人机发生故障,因此,在无人机出厂前,都会通过振动测试装置对无人机进行振动测试,将其中的不合格品淘汰掉,保证无人机的质量。
3、现有的振动测试装置大多只能对无人机进行水平方向和垂直方向的振动测试,无法模拟不同的飞行姿态下的振动情况(例如:倾斜飞行、旋转飞行等),使得测试结果不够准确,且随着科技的发展,无人机的造型迥异,现有装置在进行振动测试时,大多通过弹性绑带对造型各异的无人机进行固定,固定效果不佳,不利于振动测试的进行。
4、为避免上述技术问题,确有必要提供一种无人机机械振动测试装置以克服现有技术中的所述缺陷。
技术实现思路
1、本发明的目的在于提供一种无人机机械振动测试装置,旨在解决测试结果不准确和固定效果不佳的问题。
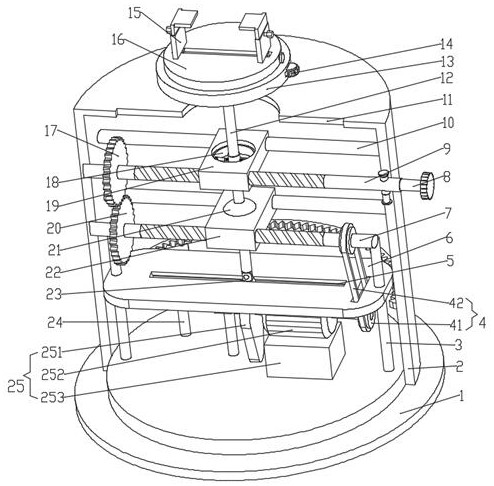
2、本发明是这样实现的,一种无人机机械振动测试装置,包括底座,所述底座上转动连接有回转筒,所述回转筒的内部固定连接有两个光杆,两个所述光杆上分别滑动连接有第一移动块和第二移动块,所述第二移动块的侧面开设有球形臼槽,所述球形臼槽的内部转动连接有球形套筒,所述球形套筒的内部贯穿并滑动连接有振动杆,所述第一移动块的顶部开设有活动孔,所述活动孔的直径大于振动杆的直径,所述振动杆从活动孔中穿过,所述振动杆穿出回转筒顶部的一端固定连接有固定座,所述回转筒的顶部开设有供振动杆活动的条缝,所述固定座的内部转动连接有转动座,所述转动座用于安装无人机,所述回转筒的内部还转动连接有第一往复丝杆和第二往复丝杆,所述第一往复丝杆和第二移动块螺纹连接,所述第二往复丝杆和第一移动块螺纹连接,所述第一往复丝杆和第二往复丝杆的螺旋方向相同,所述第一往复丝杆的一端固定连接有第二齿轮,所述第二往复丝杆的一端滑动连接有第一齿轮,所述第一齿轮能够和第二齿轮啮合连接,且所述第一齿轮的直径和第二齿轮的直径相同,所述底座位于回转筒内部的顶部固定连接有两个立柱,两个所述立柱上滑动连接有同一个升降板,所述升降板的顶部开设有第一滑槽,所述第一滑槽的内部滑动连接有第一滑块,所述第一滑块的顶部铰接有铰接座,所述铰接座和振动杆的一端转动连接,还包括:
3、摆动开关机构,所述第二往复丝杆的内部开设有安装槽,所述摆动开关机构安装在安装槽的内部,所述摆动开关机构的一端与第一齿轮连接,摆动开关机构用于带动第一齿轮沿第二往复丝杆的轴向方向移动,进而使第一齿轮和第二齿轮脱离,从而使第二往复丝杆和第一往复丝杆不再同步运动,从而使第一往复丝杆带动第二移动块运动,第二移动块通过球形套筒带动振动杆运动,振动杆围绕第一移动块上的活动孔运动,从而可以使振动杆进行往复的摆动,对无人机进行倾斜的振动测试;
4、夹持机构,所述夹持机构安装在转动座上,夹持机构用于对无人机进行夹持并固定;
5、方位调节机构,所述方位调节机构安装在固定座上,所述方位调节机构的输出端与转动座连接,方位调节机构用于带动转动座转动,转动座带动无人机转动,进而可以调节无人机的摆动角度,对无人机测试更全面;
6、平衡机构,所述平衡机构连接在活动孔和振动杆之间,平衡机构用于使振动杆保持在活动孔的中心位置;
7、动力机构,所述动力机构安装在底座位于回转筒内部的顶部上,所述动力机构与升降板的底部抵接,动力机构用于带动升降板升降,进而对无人机进行垂直的振动测试;
8、回转机构,所述回转机构安装在底座上,所述回转机构的一端连接在回转筒的内侧壁上,所述回转机构的另一端与动力机构的输出端连接,回转机构用于带动回转筒往复转动,回转筒通过第二往复丝杆和光杆带动第一移动块往复转动,第一移动块通过平衡机构带动振动杆、固定座、转动座以及无人机往复转动,进而对无人机进行水平方向的回转振动测试;
9、传动机构,所述传动机构连接在动力机构的输出端和第一往复丝杆之间,所述动力机构通过传动机构带动第一往复丝杆持续转动,第一往复丝杆带动第二移动块往复移动。
10、进一步的技术方案,所述摆动开关机构包括插设在安装槽内部的调节杆,所述调节杆的一端固定连接有固定柱,所述第二往复丝杆的侧面开设有供固定柱活动的开槽,所述固定柱贯穿开槽的一端与第一齿轮固定连接,所述调节杆位于第二往复丝杆外侧的一端固定连接有调节轮,为了保证第一齿轮和第二齿轮传动的稳定性,在所述第二往复丝杆和调节杆之间设置有锁死结构,当所述第一齿轮和第二齿轮啮合时,所述锁死结构将调节杆固定在第二往复丝杆上,从而使第一齿轮与第二往复丝杆固定,避免第一齿轮和第二齿轮脱离啮合状态,或当所述第一齿轮与第二齿轮脱开时,锁死结构也会将第一齿轮固定,避免第一齿轮与第二齿轮接触。
11、进一步的技术方案,所述锁死结构包括固定连接在第二往复丝杆上的限位筒,所述限位筒和安装槽连通,所述限位筒的内部滑动连接有锁死杆,所述调节杆上开设有供锁死杆活动的活动槽,所述锁死杆包括两个插杆和一个连接杆,两个所述插杆分别固定连接在连接杆的两端,所述连接杆的直径小于插杆的直径,所述活动槽的宽度小于插杆的直径,所述连接杆的长度大于调节杆的直径,所述调节杆上还开设有第一卡槽和第二卡槽,当所述插杆插入第一卡槽内部时,所述第一齿轮和第二齿轮啮合,当所述插杆插入第二卡槽内部时,所述第一齿轮和第二齿轮脱开,为了避免插杆从第一卡槽或第二卡槽内退出,在所述调节杆和安装槽的侧壁之间设置有压缩弹簧,压缩弹簧推动调节杆向第二往复丝杆外侧运动,从而增大插杆和第一卡槽之间的摩擦力,使插杆不会轻易从第一卡槽或第二卡槽内脱出。
12、进一步的技术方案,所述夹持机构包括开设在转动座顶部的第二滑槽,所述第二滑槽的内部滑动连接有两个第二滑块,两个所述第二滑块的顶部均固定连接有固定盒,两个所述固定盒的顶部均滑动连接有顶夹板,两个所述顶夹板相对设置,所述固定盒的侧面螺纹连接有紧固螺栓,所述紧固螺栓的一端与顶夹板抵接,所述第二滑槽的内部转动连接有双头螺杆,所述双头螺杆的两端分别和两个第二滑块螺纹连接,所述双头螺杆伸出转动座的一端固定连接有手轮。
13、进一步的技术方案,所述方位调节机构包括固定连接在固定座上的固定板,所述固定板的侧面转动连接有调节齿轮,位于所述固定座内部的所述转动座的侧面固定连接有齿环,所述齿环和调节齿轮啮合连接。
14、进一步的技术方案,所述动力机构包括固定连接在底座顶部的安装台,所述安装台的顶部固定安装有电动机,所述电动机的一个输出轴固定连接有凸轮,所述凸轮的侧面能够与升降板的底部抵接。
15、进一步的技术方案,所述回转机构包括固定连接在底座顶部的立杆和转动连接在底座顶部的转动杆,所述立杆的顶端转动连接有不完全摆动齿轮,所述回转筒的内侧壁固定连接有齿圈,所述不完全摆动齿轮和齿圈啮合连接,所述转动杆的顶部固定连接有转盘,所述转盘上偏心位置转动连接有连接板,所述连接板的一端与不完全摆动齿轮的偏心位置转动连接,所述转动杆上固定连接有蜗轮,所述电动机的输出轴固定连接有蜗杆,所述蜗杆和蜗轮啮合连接。
16、进一步的技术方案,所述传动机构包括两个链轮,一个所述链轮固定连接在电动机另一个输出轴上,另一个所述链轮固定连接在第一往复丝杆的一端,两个所述链轮之间传动连接有链条,所述升降板上开设有供链条活动的活动缝。
17、进一步的技术方案,所述平衡机构包括固定连接在活动孔内部的外环,所述外环和活动孔的轴心重合,所述外环的内侧壁上对称铰接有两个弹性伸缩杆,两个所述弹性伸缩杆相对的一端铰接有同一个内环,初始状态下,所述内环的轴心和外环的轴心重合,所述内环套设在振动杆上。
18、进一步的技术方案,所述弹性伸缩杆包括外筒,所述外筒铰接在外环内侧壁上,所述外筒的内部插设有内杆,所述内杆的一端铰接在内环的侧面,所述外筒和内杆之间连接有拉伸弹簧。
19、相较于现有技术,本发明的有益效果如下:
20、1、将无人机放置在转动座顶部,转动手轮,手轮带动双头螺杆转动,双头螺杆带动两个固定盒相互靠近,并将无人机夹持,然后松开紧固螺栓,顶夹板会自由下落,并与无人机顶部抵接,再拧紧紧固螺栓,将顶夹板固定在固定盒上,从而将无人机固定,该装置可以将无人机的侧面和顶部都固定,使其固定效果更准确,并能对大部分型号的无人机进行固定;
21、2、当对无人机进行竖直振动、水平振动以及回转振动测试时,先使振动杆处于竖直状态,然后使第一齿轮和第二齿轮啮合,接着,启动电动机,电动机带动无人机升降,进而可对无人机的竖直方向进行振动测试,同时,电动机也会带动振动杆水平移动,进而对无人机进行水平振动测试,电动机会通过回转机构带动回转筒往复转动,回转筒带动无人机往复转动,进而对无人机进行回转振动测试,对无人机的振动测试更全面,测试效果更准确;
22、3、当对无人机进行倾斜方向的振动测试时,拉动插杆,将插杆从第一卡槽内拔出,然后推动调节轮,调节轮带动调节杆移动,调节杆带动第一齿轮移动,使第一齿轮和第二齿轮错位,并推动插杆,将插杆插入第二卡槽内,从而使第一齿轮和第二齿轮分离,然后电动机会带动第二移动块往复移动,第二移动块通过球形套筒带动振动杆围绕活动孔摆动,从而对无人机进行倾斜方向的振动测试,使无人机的振动测试更全面,测试效果更准确;
23、4、在振动测试过程中,还可以对无人机的摆动方向进行调节,转动调节齿轮,调节齿轮带动齿环转动,齿环带动转动座转动,转动座带动无人机围绕振动杆转动,从而可以调节无人机的摆动受力方向,可以对无人机进行全方位的测试,提高测试效果。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222794.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表