一种仿甲虫后翅折叠机理的空间可展机构
- 国知局
- 2024-08-01 06:21:15
本发明属于卫星太阳翼领域,特别设计一种仿甲虫后翅折叠机理的空间可展机构。
背景技术:
1、飞行器(mav)为运输、测量和通信任务提供了通用的解决方案。可折叠机翼越来越多地用于具有固定翼或扑翼机制的无人飞行器,因为它们能够在运输过程中缩小尺寸,同时保持有效的飞行能力。这进一步促进了多个mav的协同运输,实现了大规模搜索应用。
2、近年来,研究人员从鸟类、蝙蝠和昆虫身上汲取灵感,设计出诸多可折叠翅膀。折叠率量化了展开和折叠机翼面积之间的比例,是评估可折叠机翼性能的一个重要因素。更高的折叠率可以实现更大的机翼延伸,从而在展开时产生更大的翼面积,并增加升力。
3、当前,空间可折展机构在人类的科技探索活动中发挥着举足轻重的作用,如空间可展天线、太阳能折叠板、变形翼无人机、大型体育场所的可折叠遮阳棚等。然而,如何实现空间可展机构的轻量化、高折叠率、驱动简单及折展过程的灵活稳定性是当前研究的重点。
技术实现思路
1、本发明提出一种仿甲虫后翅折叠机理的空间可展机构,折叠率大,拆卸灵活,解决了现有技术中可展机构并未实现单自由度折叠的问题。
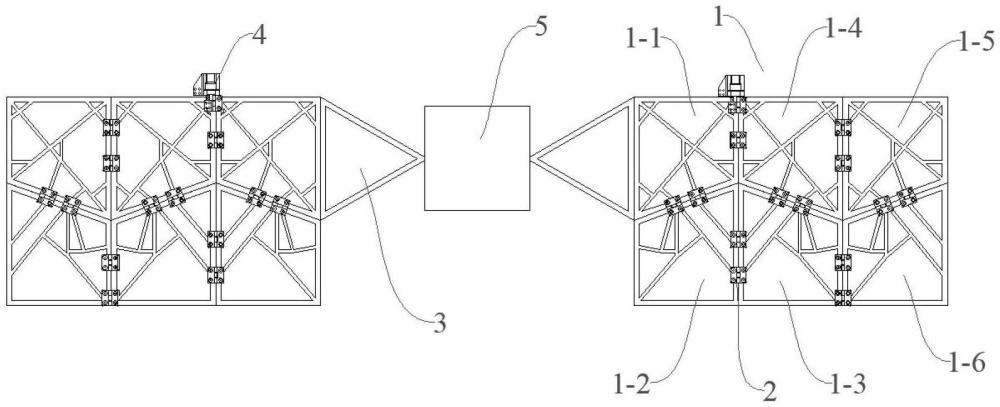
2、本发明所采用的技术方案是:一种仿甲虫后翅折叠机理的空间可展机构,包括基板模块(1),
3、基板模块(1)包括两行三列排布的六块基板,相邻两块基板之间通过合页铰链模块(2)转动连接,
4、基板包括第一基板(1-1)、第二基板(1-2)、第三基板(1-3)、第四基板(1-4)、第五基板(1-5)、第六基板(1-6),第一基板固定在本体模块(5)上,
5、驱动装置模块(4)的输出轴固定连接第四基板(1-2)以驱动第四基板(1-2)相对于第一基板(1-1)转动使得第一基板(1-1)、第二基板(1-2)、第三基板(1-3)、第四基板(1-4)、第五基板(1-5)、第六基板(1-6)在单自由度下进行展开或折叠动作;
6、其中,合页铰链模块(2)的厚度与基板的厚度存在关系:d1>2d2
7、第一至第六基板组成的机构上具有两个由四条折叠线交叉形成的四度顶点,构成了一个单自由度机构,第一至第六基板之间运动的夹角称作二面角,即θ1、θ2、θ3和θ4,折叠线之间的夹角α、β、γ和δ称作每块基板的扇区角,在靠近本体模块(5)的前一级折叠中,左边四块板的状态由四个扇区角(α、β、γ和δ)和四个二面角(θ1、θ2、θ3和θ4)表示,θ1、θ2、θ3和θ4可根据d-h参数矩阵计算:
8、
9、
10、其中,令公式中的sθi=sinθi,cθi=cosθi(i=1~4),进一步推导得:
11、
12、
13、根据图1中的基板(1-3)的空间位置约束,有q12q23=q14q43,进一步整理得:θ1=θ3,
14、
15、根据后翅的平面可折叠性分析建立几何条件,如图1所示的角度p1和p2定义了支点折线、而m1和m2定义了中间折线。p和m是这些折线的基点。两个四度的顶点被命名为v1和v2,扇区角αj、βj、γj和δj,其中j=1,2被定义在每个基板的顶点。由于在完全展开的状态下,所有顶点都位于同一平面上,因此平面可折叠性的条件可以表示为:
16、αj+γj=π(j=1,2)
17、βj+δj=π(j=1,2)
18、其中,m1、m2、p1、p2是后翅上的翅脉间的夹角,均可测量得到,分别为13°、15°、40°、34°。由于v1周围的四个三角形形成了一个四边形,有两条共同的线,根据正弦定理,以下方程成立:
19、
20、根据以上计算公式和后翅转动关节位置(β1)、弯曲区(β2)所测定的角度值,即可获取扇区角(αj、βj、γj和δj)的值,依据翅根到翅尖基板所对应的角度对扇区角进行逆时针排序。
21、在上述方案的基础上,作为优选,第一基板(1-1)、第二基板(1-2)、第三基板(1-3)、第四基本(1-4)、第五基板(1-5)、第六基板(1-6)均由起到加强作用的横纵框架组成。
22、在上述方案的基础上,作为优选,第一基板通过三角形的连接架模块(3)和本体模块(5)焊接在一起。
23、在上述方案的基础上,作为优选,合页铰链模块(2)为合页铰链,用于连接第一基板、第二基板的合页铰链包括第一合页铰链,第一合页铰链具有第一合页、第二合页,第一合页固定在第一基板,第二合页固定在第四基板上。
24、在上述方案的基础上,作为优选,驱动装置模块(4)包括支架(4-1)、谐波减速器(4-2)、步进电机(4-3)、制动器(4-4)和输出轴(4-5),支架(4-1)通过销钉固定在基板(1-1)上,步进电机连接谐波减速器,谐波减速器连接制动器,制动器的输出轴固定连接第一合页。
25、与现有技术相比,本发明具有以下有益效果:
26、在本发明中,本体模块、连接架模块和基板模块之间是焊接在一起,六个基板之间通过合页铰链相连,驱动装置安装在第一基板和第二基板之间。在驱动装置上给电机施加驱动,由于铰链约束和双稳态机制的作用下,可展机构在单自由度下即可实现折展运动。本发明的仿生空间可展机构具有较大的折叠率,折展较灵活,并且可应用于航空航天等两栖飞行器上,并且具有运输方便,拆卸灵活,具有广阔的民用和军用前景。
技术特征:1.一种仿甲虫后翅折叠机理的空间可展机构,其特征在于,包括基板模块(1),
2.如权利要求1所述的仿甲虫后翅折叠机理的空间可展机构,其特征在于,第一基板(1-1)、第二基板(1-2)、第三基板(1-3)、第四基板(1-4)、第五基板(1-5)、第六基板(1-6)均由起到加强作用的横纵框架组成。
3.如权利要求1所述的仿甲虫后翅折叠机理的空间可展机构,其特征在于,第一基板通过三角形的连接架模块(3)和本体模块(5)焊接在一起。
4.如权利要求1所述的仿甲虫后翅折叠机理的空间可展机构,其特征在于,合页铰链模块(2)为合页铰链,用于连接第一基板、第二基板的合页铰链包括第一合页铰链,第一合页铰链具有第一合页、第二合页,第一合页固定在第一基板,第二合页固定在第四基板上。
5.如权利要求4所述的仿甲虫后翅折叠机理的空间可展机构,其特征在于,驱动装置模块(4)包括支架(4-1)、谐波减速器(4-2)、步进电机(4-3)、制动器(4-4)和输出轴(4-5),支架(4-1)通过销钉固定在基板(1-1)上,步进电机连接谐波减速器,谐波减速器连接制动器,制动器的输出轴固定连接第一合页。
技术总结本发明公开了一种仿甲虫后翅折叠机理的空间可展机构,其特征在于,包括基板模块,基板模块包括两行三列排布的六块基板,相邻两块基板之间通过合页铰链模块转动连接,基板包括第一基板、第二基板、第三基板、第四基板、第五基板、第六基板,第一基板固定在本体模块上,驱动装置模块的输出轴固定连接第四基板使得第一基板、第二基板、第三基板、第四基板、第五基板、第六基板在单自由度下进行展开或折叠动作。由于铰链约束和双稳态机制的作用下,可展机构在单自由度下即可实现折展运动。本发明的仿生空间可展机构具有较大的折叠率,折展较灵活,并且可应用于航空航天等两栖飞行器上,并且具有运输方便,拆卸灵活,具有广阔的民用和军用前景。技术研发人员:李新,陆术华,郑宇,许志媛,王升,严天昊,王梦茹,阮丹红,陈红芸,崔文欣受保护的技术使用者:宿迁学院技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223441.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表