一种海洋机器人基于进排水的浮力调节控制系统及方法
- 国知局
- 2024-08-01 06:47:31
本发明涉及一种海洋机器人领域,具体说是一种海洋机器人基于进排水的浮力调节控制系统及方法。
背景技术:
1、海洋机器人可在水下自主航行,其具有航行稳定、携带传感器种类多、水下续航时间长、能够自主完成多种使命等优势,已经成为深海探测活动的重要技术手段之一。为降低功耗海洋机器人通常采用调整浮力大小来完成下潜及上浮动作,但目前的海洋机器人陆用进排水控制系统实现该系列动作,而对于上述陆用进排水控制系统,用于海洋机器人进排水控制系统存在特殊要求:
2、(1)自动控制问题。对于海洋机器人来说,在无人操控时需要自动控制进排水;
3、(2)控制系统集成。对于海洋机器人来说,需要控制系统小型化集成。
技术实现思路
1、针对现有技术的不足,本发明提供一种海洋机器人基于进排水的浮力调节控制方法及应用系统,该控制系统通过自身的控制单元完成海洋机器人在航行时根据需要进行进排水控制,以克服上述陆用进排水控制系统的缺陷。
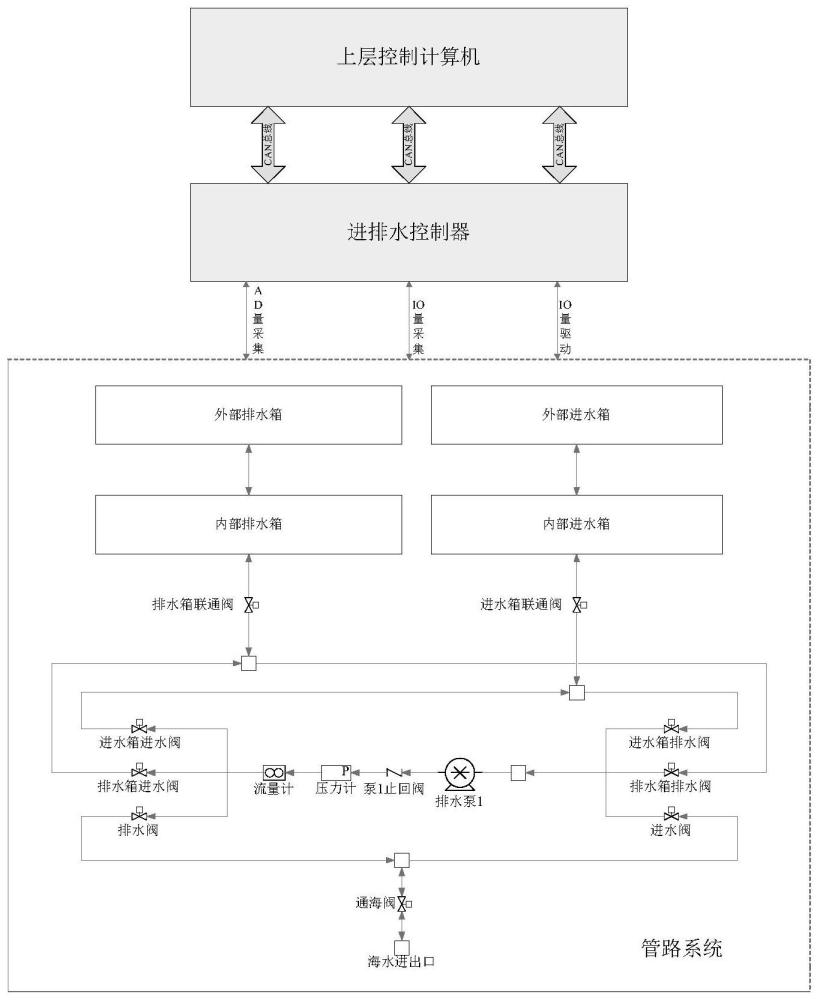
2、本发明为实现上述目的所采用的技术方案是:一种海洋机器人基于进排水的浮力调节控制系统,包括:上层控制计算机、进排水控制器以及进排水管路系统;
3、上层控制计算机,通过can总线与进排水控制器连接,用于接收进排水控制器反馈的实时信号,并对进排水控制器发出进水控制命令或排水控制命令;
4、进排水控制器,通过i/o接口与进排水管路系统连接,与进排水管路系统实时通信,接收进排水管路系统反馈的信号值,根据进排水管路系统反馈的信号值进行判断,以对进排水管路系统实现实时控制;
5、进排水管路系统,用于反馈压力、流量以及液位信息的信号值至进排水控制器,并通过进排水控制器的控制,实现进水、排水的通断。
6、所述进排水控制器,包括:电源板、模拟资源板、模拟隔离板、数字资源板和数字驱动板;
7、所述电源板连接模拟资源板,用于分别对模拟资源板提供5vdc、12vdc和24vdc;
8、所述模拟资源板一端与模拟隔离板连接,用于向模拟隔离板提供所需的24vdc,并接收通过模拟隔离板隔离后的模拟信号;另一端连接数字资源板,用于向数字资源板提供所需的5vdc和12vdc,且与数字资源板进行spi同步串行通信;
9、所述模拟隔离板与模拟量信号的传感器连接,用于接收传感器的4-20ma电流信号,并电流信号隔离后传入模拟资源板;
10、所述数字资源板与数字驱动板连接,所述数字驱动板,用于输出24vdc电压信号,驱动进排水管路系统的执行元件,以及接收进排水管路系统反馈的电压信号。
11、所述进排水管路系统,包括:进水箱、排水箱、外部进水箱、外部排水箱、排水控制管路以及进排水管路;
12、所述进排水管路包括:第一排水支路、第二排水支路以及进水支路;
13、在所述第一排水支路上,海水从进水箱流出,通过第一排水支路依次经进水箱进出水接口、进水箱排水阀、进排水控制管路、排水阀、海水连通口、通海阀流出至海水进出口;
14、在所述第二排水支路上,海水从排水箱流出,通过第二排水支路依次经排水箱进出水接口、排水箱排水阀、进排水控制管路、排水阀、海水连通口、通海阀流出至海水进出口;
15、在所述进水支路上,海洋机器人外的海水依次经海水进出口、通海阀海水连通口、进水阀、进排水控制管路分别进入至进水箱进水阀和排水箱进水阀;
16、所述进水箱进水阀和排水箱进水阀分别通过进水箱进出水接口和排水箱进出水接口与进水箱和排水箱连接。
17、所述进排水控制管路,包括:顺次设置在进排水管路上的排水泵、排水泵止回阀、压力计和流量计;
18、所述进排水管路的输入端分别与进水箱排水阀、排水箱排水阀以及进水阀连接,进排水管路的输出端分别与进水箱进水阀、排水阀进水箱以及排水阀连接;
19、所述流量计通过ad接口与进排水控制器连接,用于采集进、排水回路的流量信息,监控进排水管路中各支路的流量状态;
20、所述压力计通过ad接口与进排水控制器连接,用于采集进、排水回路的压力信息,监控进排水管路中各支路的压力状态;
21、所述排水泵还通过i/o接口与进排水控制器连接,用于控制排水泵的启停。
22、所述进水箱和排水箱均设于海洋机器人内;
23、所述进水箱和排水箱内均设有液位传感器,所述液位传感器通过ad接口与进排水控制器连接,以采集进水箱、排水箱的液位位置信息,监控液位状态。
24、所述进水箱排水阀、排水箱排水阀、排水阀、通海阀、进水箱进水阀、排水箱进水阀均为电动球阀;
25、所述电动球阀均通过i/o接口与进排水控制器连接,用于控制进排水管路中各支路的通断。
26、所述进水箱进出水接口与进水箱之间的管路上设有进水箱联通阀;排水箱进出水接口与排水箱之间的管路上设有排水箱联通阀;
27、所述进水箱联通阀和排水箱联通阀通过i/o接口与进排水控制器连接,用于控制排水箱和排水箱的进水和出水的通断。
28、一种海洋机器人基于进排水的浮力调节控制系统的控制方法,包括以下步骤:
29、1)海洋机器人航行前,上层控制计算机通过can总线向进排水控制器下达指令,开启通海阀、进水阀,进水箱进水阀、排气水箱进水阀,进水箱联通阀、排水箱联通阀,进排水控制器输出控制信号使排水泵开始工作,开始进水工作;
30、2)进排水控制管路上的流量计检测进水管路流量状态,当检测到管路都没有流量时,或进排水控制管路上的压力计检测进水管路压力状态,当检测到管路都没有压力时发送至进排水控制器,进排水控制器关闭排水泵、进水箱进水阀、排水箱进水阀;
31、3)当海洋机器人需要排水时,上层控制计算机给进排水控制器下达排水控制命令,进排水控制器接受排水控制命令,并驱动打开通海阀、排水阀,进气水箱排水阀、排水箱排水阀,进水箱联通阀、排水箱联通阀,进排水控制器开始排水控制。
32、所述进排水控制器输出控制信号使排水泵开始工作,开始进水工作,具体为:
33、上层控制计算机给进排水控制器下达进水控制命令,进排水控制器接受进水控制命令,开启通海阀、进水阀、进水箱联通阀、排水水箱联通阀、进水箱进水阀及排水箱进水阀,打开排水泵,并获取进水箱和排水箱的液位信息;
34、若进水箱和排水箱的液位信息都大于设定液位,则关闭排水泵、通海阀、进水阀、进水箱联通阀、排水水箱联通阀、进水箱进水阀及排水箱进水阀;否则继续进水设定时间后;
35、继续进水设定时间后,若两液位仍大于设定液位,则关闭排水泵、通海阀、进水阀、进水箱联通阀、排水水箱联通阀、进水箱进水阀及排水箱进水阀;否则认为进水超时并上报至进排水控制器并关闭排水泵、通海阀、进水阀、进水箱联通阀、排水水箱联通阀、进水箱进水阀及排水箱进水阀,进水工作结束。
36、所述进排水控制器开始排水控制,具体为:
37、上层控制计算机给进排水控制器下达排水控制命令,进排水控制器接受排水控制命令,开启通海阀、排水阀、进水箱联通阀、排水水箱联通阀、进水箱排水阀及排气水箱排水阀,打开排水泵,并获取进水箱和排水箱液位信息;若进水箱和排水箱的液位信息都为0,则关闭排水泵、通海阀、排水阀、进水箱联通阀、排水水箱联通阀、进水箱排水阀及排气水箱排水阀;否则继续进水设定时间后;
38、继续进水设定时间后,若两液位都等于0,则关闭排水泵、通海阀、排水阀、进水箱联通阀、排水水箱联通阀、进水箱排水阀及排气水箱排水阀;否则认为进水超时并上报并关闭排水泵、通海阀、排水阀、进水箱联通阀、排水水箱联通阀、进水箱排水阀及排气水箱排水阀,排水工作结束。
39、本发明具有以下有益效果及优点:
40、1、本发明的进排水控制器采用控制与功率驱动一体化设计,降低了控制系统在海洋机器人所需的空间。
41、2、本发明的控制系统可以根据实际应用情况调整控制参数,可靠性高。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225049.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表