一种反水雷航行器
- 国知局
- 2024-08-01 06:49:56
本发明属于航行器领域,具体涉及一种反水雷航行器。
背景技术:
1、无人水下航行器(unmanned underwater vehicle,uuv)是一种依靠自身携带能源自主航行,可根据搭载不同的载荷执行多种任务的无人水下平台。uuv在军事、民用领域运用广泛,能够完成海洋探测、水下设施检查、水雷对抗等多种任务,uuv的研发已成为各国海洋技术研究的热点。21世纪以来,美国已相继发布了《无人航行器主计划》、《2013-2038年无人系统发展路线图》等一系列顶层战略规划文件,积极推动了水下无人自主平台和跨域协同互联作战能力生成。近些年我国对uuv的研究重视程度不断提高,也取得显著的成效,国产uuv呈现出了集持续化,高性能化和高仿生化的特点。我国相继发布了《面向2035年的海洋领域科技发展战略研究》和《深海和极地关键技术与装备》等指导规划,指导航行器的发展方向。
2、水雷,这种低成本、隐蔽且具有巨大杀伤力的武器,一直在海战中发挥着重要的作用。随着现代海战的发展,水雷种类和部署方式愈发复杂,这无疑增大了清除水雷的困难和挑战性。在这种背景下,开发具有专业反水雷能力的水下无人航行器变得尤为重要。它能够自主地在水下进行搜索、识别并清除水雷,大大降低了水雷清除的难度和危险性,确保了海上通道的畅通和安全。因此,研发反水雷uuv不仅是解决现代海战中一项重要挑战的关键,也对保护海军力量、保障海上通道安全,甚至对整个海洋环境保护具有重要的贡献。
3、处置型反水雷uuv的研究具有重大意义。这种uuv能显著提高水雷清除工作的效率,确保海上人员和装备的安全。同时它能在复杂多变的海域环境中执行任务,极大地扩展了水下作战范围。此外,处置型反水雷uuv为现代海军作战提供了新的战术选择,促进了海上战略格局的改变。处置型反水雷uuv的研发和应用是现代科技发展的体现,它不仅推动了军事科技的进步,也将对海洋考察、海底资源开发等其他领域产生深远影响。
技术实现思路
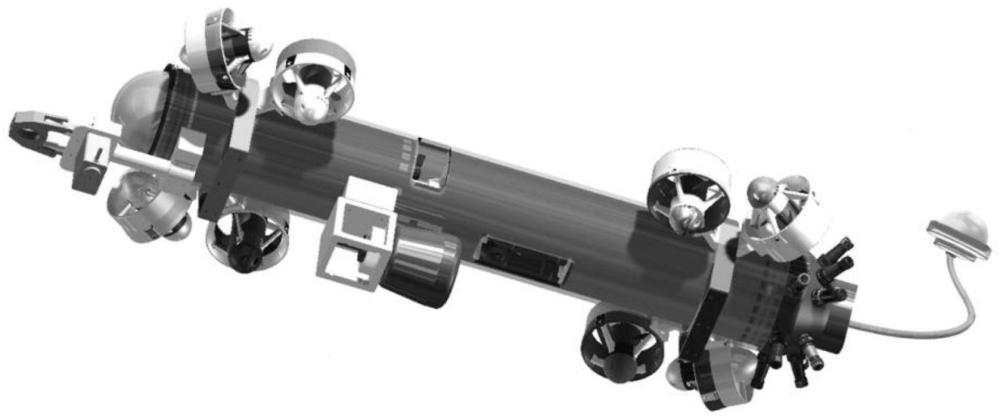
1、本发明提供的一种反水雷航行器,包括航行器本体,其特征在于,还包括水雷目标识别系统,识别水雷;水雷反除系统,反水雷;路径规划系统,规划航行路径。
2、作为本发明的进一步优化,水雷目标识别系统包括前视模块,前视模块设于航行器本体上,水雷目标识别系统识别水雷目标包括以下步骤:
3、a1:基于gan网络进行水下图像增强;
4、a2:基于yolo识别检测出a1图像中的水雷。
5、作为本发明的进一步优化,水雷反除系统包括机械爪模块,机械爪模块设于航行器本体上,当基于yolo识别的锚链识别框与机械爪模块剪切作业区有所重合时,且拟合锚雷识别框和图像比例与前视模块到锚雷距离满足公式
6、y=-0.0002x3+0.0104x2-0.1606x+1.0137
7、时,机械爪模块执行剪切锚链操作,其中x是前视模块到锚雷的距离,其中y是锚雷识别框宽度。
8、作为本发明的进一步优化,水雷目标识别系统包括下视模块;水雷反除系统包括投放模块;下视模块检测到的灭雷炸弹有效投掷区域与沉底雷识别区域重合时,投放模块投放灭雷炸弹。
9、作为本发明的进一步优化,航行器本体还设有声呐通信模块;声呐通信模块包括声呐和水声换能器,水声换能器接收声呐的回音并将声信号转化成电信号,并通过脉冲宽度调制进行爆炸时间设定。
10、作为本发明的进一步优化,当脉冲宽度调制占空比超过60%时,进入起爆启动状态;当脉冲宽度调制进占空比为70%时8秒后起爆;当脉冲宽度调制进占空比为80%时20秒后起爆;当脉冲宽度调制进占空比为90%时30秒后起爆;当脉冲宽度调制进占空比为100%时90秒后起爆。
11、作为本发明的进一步优化,路径规划系统规划路径包括以下步骤:
12、c1:从已知海域数据库中获取海域数据并设定起始点和目标点;
13、c2:采用栅格法建立三维环境模型;
14、c3:进行全局路径规划;
15、c4:探测未知路径信息并结合深度强化学习进行局部路径规划;
16、c5:综合估计路径代价的全局路径规划与深度强化学习局部路径规划得到指定海域下的三维路径规划结果。
17、作为本发明的进一步优化,估计路径代价的全局路径规划包括以下步骤:
18、d1:计算任意两点间欧式距离作为路径代价后构建欧式距离代价矩阵;
19、d2:训练神经网络估计任意两点路径代价后构建估计路径代价矩阵;
20、d3:利用informed-rrt算法实际规划两点的路径后构建实际路径代价矩阵;
21、d4:利用遗传算法将d1、d2、d3构建的矩阵带入到tsp求解得到遍历顺序,最终获得全局路径规划。
22、作为本发明的进一步优化,还包括集群控制系统;集群控制系统为若干反水雷航行器分布反水雷任务以及路径规划。
23、作为本发明的进一步优化,还包括浮标部和终端,浮标部设与航行器通过电力线连接,浮标部与航行器听过电力线载波相互通信,浮标部与终端无线通信。
24、本发明提供的一种反水雷航行器,能自主识别并稳定跟踪锚雷、沉底雷目标;依据识别执行剪切锚链或投掷灭雷炸弹操作;通信声呐设定引爆时间同时清除多个沉底雷;基于估计路径代价的多目标点路径规划算法;实现航行器集群控制及任务规划。
技术特征:1.一种反水雷航行器,包括航行器本体,其特征在于,还包括水雷目标识别系统,识别水雷;水雷反除系统,反水雷;路径规划系统,规划航行路径。
2.根据权利要求1所述的一种反水雷航行器,其特征在于,水雷目标识别系统包括前视模块,前视模块设于航行器本体上,水雷目标识别系统识别水雷目标包括以下步骤:
3.根据权利要求2所述的一种反水雷航行器,其特征在于,水雷反除系统包括机械爪模块,机械爪模块设于航行器本体上,当基于yolo识别的锚链识别框与机械爪模块剪切作业区有所重合时,且拟合锚雷识别框和图像比例与前视模块到锚雷距离满足公式
4.根据权利要求1所述的一种反水雷航行器,其特征在于,水雷目标识别系统包括下视模块;水雷反除系统包括投放模块;下视模块检测到的灭雷炸弹有效投掷区域与沉底雷识别区域重合时,投放模块投放灭雷炸弹。
5.根据权利要求4所述的一种反水雷航行器,其特征在于,航行器本体还设有声呐通信模块;声呐通信模块包括声呐和水声换能器,水声换能器接收声呐的回音并将声信号转化成电信号,并通过脉冲宽度调制进行爆炸时间设定。
6.根据权利要求5所述的一种反水雷航行器,其特征在于,当脉冲宽度调制占空比超过60%时,进入起爆启动状态;当脉冲宽度调制进占空比为70%时8秒后起爆;当脉冲宽度调制进占空比为80%时20秒后起爆;当脉冲宽度调制进占空比为90%时30秒后起爆;当脉冲宽度调制进占空比为100%时90秒后起爆。
7.根据权利要求1所述的一种反水雷航行器,其特征在于,路径规划系统规划路径包括以下步骤:
8.根据权利要求7所述的一种反水雷航行器,其特征在于,估计路径代价的全局路径规划包括以下步骤:
9.根据权利要求1所述的一种反水雷航行器,其特征在于,还包括集群控制系统;集群控制系统为若干反水雷航行器分布反水雷任务以及路径规划。
10.根据权利要求1所述的一种反水雷航行器,其特征在于,还包括浮标部和终端,浮标部设与航行器通过电力线连接,浮标部与航行器听过电力线载波相互通信,浮标部与终端无线通信。
技术总结本本发明属于航行器领域,具体涉及一种反水雷航行器。本发明提供的一种反水雷航行器,包括航行器本体,其特征在于,还包括水雷目标识别系统,识别水雷;水雷反除系统,反水雷;路径规划系统,规划航行路径。本发明提供的一种反水雷航行器,能自主识别并稳定跟踪锚雷、沉底雷目标;依据识别执行剪切锚链或投掷灭雷炸弹操作;通信声呐设定引爆时间同时清除多个沉底雷;基于估计路径代价的多目标点路径规划算法;实现航行器集群控制及任务规划。技术研发人员:汪洋,王黎明,潘炜,陈佳宝,吕帮俊,张鹏,伍周全受保护的技术使用者:中国人民解放军海军工程大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/225226.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表