一种集成化微小型水下拍摄机器人
- 国知局
- 2024-08-01 07:04:31
本发明属于水下探测设备,涉及一种水下机器人,尤其涉及一种集成化微小型水下拍摄机器人。
背景技术:
1、水下机器人诞生已久,一般作为水下勘探工具和运载工具供人类使用,在日常生活中使用较少。但是随着海洋的大力开发,海洋娱乐也逐渐变得大众化,娱乐级水下机器人的应用市场越来越大,但现如今的水下机器人存在很多问题,使用的用户仍然不多。水下机器人存在的问题包括以下几点:一是,现有的水下机器人制作成本较高、体积较大,不便携;二是,为了减少水下机器人的使用成本,一般采用充电电池,水下机器人作业时,在充电口处容易产生漏水、漏电的问题,导致水下机器人内部的电器发生损坏,减少水下机器人的使用寿命;三是,现有的水下拍摄机器人待机时间短,缩短了作业时间,影响最后的拍摄效果。
技术实现思路
1、本发明为解决上述技术问题,提供一种集成化微小型水下拍摄机器人。
2、本发明为解决上述技术问题采用的技术方案是:
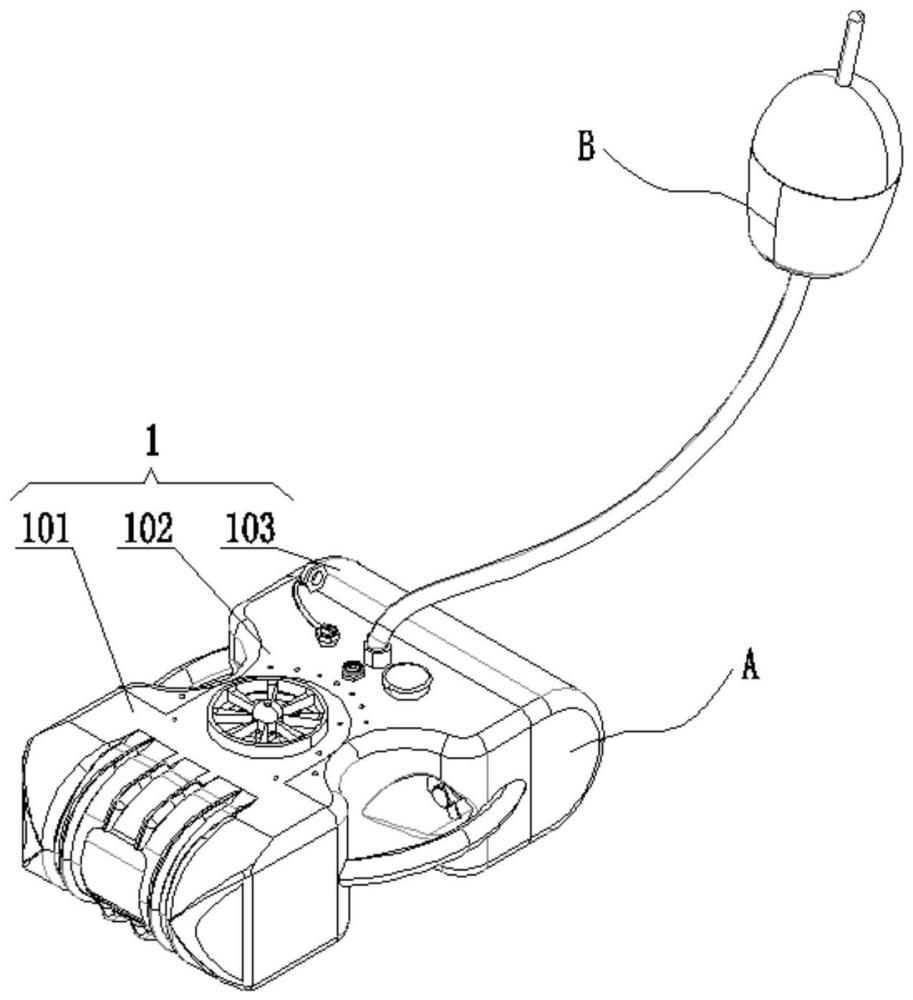
3、一种集成化微小型水下拍摄机器人,包括机器人本体、浮标信号器、视频接收器和遥控手柄;所述的浮标信号器通过缆线连接在机器人本体上,并用于信号和图像的传输;所述的视频接收器设置在地面站,并通过信号接收系统接收浮标信号器传输过来的信号和图像,用于显示机器人本体所拍摄的图像和视频;所述的遥控手柄通过内部的遥控控制系统控制机器人本体的水下运动;
4、所述的机器人本体包括外壳和由前至后依次设置在外壳内的拍摄控制系统、垂直推进器、供电系统和两个水平推进器;所述的拍摄控制系统用于水下图像的采集和信号的传输;所述的垂直推进器垂直安装在外壳内,并用于水下机器人的沉浮;所述的供电系统为拍摄控制系统、垂直推进器、浮标信号器和两个水平推进器供电;两个所述的水平推进器分别布置在外壳尾端的左右两侧,并用于水下机器人的前进、后退和偏转。
5、进一步的,所述的外壳包括由前至后依次设置并连接的艏段外壳、舯段外壳和艉段外壳,艏段外壳、舯段外壳以及艉段外壳的内腔相连通;所述的艏段外壳与舯段外壳连接后,在外壳的上下表面形成与内部相通的两个安装口,垂直推进器安装在两个安装口内;所述的拍摄控制系统布置在艏段外壳的内腔中;所述的舯段外壳上开有一个线缆安装口,浮标信号器上的缆线穿过线缆安装口并与拍摄控制系统电连接;所述的供电系统布置在舯段外壳与艉段外壳的内腔中;两个所述的水平推进器分别布置在舯段外壳和艉段外壳在安装后两侧所形成的推进器安装腔内。
6、进一步的,所述的艏段外壳采用流线型设计,且由光敏树脂材料制作而成;
7、所述艏段外壳的前端开有一个内外相通的前视窗口,在前视窗口处安装有一个透明的罩体;所述的艏段外壳上且处于前视窗口的上下两侧,分别布置有两道纵向的加强肋。
8、进一步的,所述舯段外壳的左右两侧向内凹陷,水平推进器的前端正对舯段外壳的凹陷处;所述舯段外壳的左右两侧且正对凹陷处各设置有一个提手。
9、进一步的,所述舯段外壳的上下表面且处于垂直推进器的周围,以及舯段外壳的边缘处,分别开有若干个与壳体内部相通的微型孔洞。
10、进一步的,所述的艉段外壳内留有浮力材预留空间。
11、进一步的,所述的拍摄控制系统包括电子密封舱、第一pcb板、安装板、舵机、摄像头和两个水下补光灯,所述的安装板和第一pcb板并排布置在电子密封舱内,且二者通过六角铜柱进行固定连接;所述的舵机固定安装在电子密封舱的一侧舱盖上,安装板的一端连接在舵机的驱动端,安装板的另一端通过转轴转动连接在电子密封舱的另一侧舱盖上;所述的摄像头安装在安装板背向第一pcb板的一侧,并朝向艏段外壳的前视窗口侧延伸,其中摄像头、舵机和用于驱动垂直推进器和水平推进器的舵机与第一pcb板电连接;两个所述的水下补光灯分别布置在摄像头的左右两侧,并固定安装在安装板上,并为摄像头提供光照。
12、进一步的,所述的供电系统包括防水电池盒、防水充电口和充电线,所述的防水电池盒内安装有锂电池,所述的防水充电口通过充电线与防水电池盒电连接;
13、所述的防水充电口包括安装座、充电接口和防水盖,所述的安装座固定安装在舯段外壳上,充电接口安装在安装座内,并外漏于舯段外壳,所述的安装座上且处于充电接口的周围开有外螺纹,防水盖上开有内螺纹槽,所述的防水盖螺接在安装座上,并将充电接口密封。
14、进一步的,所述的供电系统还包括电池检测机构,所述的电池检测机构包括防水开关、防水电压表、12v稳压装置、第二pcb板、漏水检测装置和提示灯;所述的12v稳压装置、第二pcb板和漏水检测装置设置在防水电池盒内,12v稳压装置和漏水检测装置安装在第二pcb板上,充电线的端部穿过防水电池盒并连接在12v稳压装置上,锂电池的充电口连接在12v稳压装置的供电口处;所述的防水开关、防水电压表和提示灯安装在舯段外壳的上表面处,所述的漏水检测装置与提示灯电连接;所述的防水电压表电连接在12v稳压装置的供电口处。
15、进一步的,所述的浮标信号器包括浮漂外壳、手柄接收器和图像传输天线,所述的手柄接收器安装在浮漂外壳内,图像传输天线的一端连接在手柄接收器上,另一端伸出浮漂外壳;用于制作浮漂外壳上半部分的材料比下半部分的材料密度小,以提高浮漂外壳在水中的稳定性。
16、本发明与现有技术相比产生的有益效果是:
17、1、本发明中的外壳为对称式结构,且采用分段式设计,便于外壳的快速安装和各个壳体内器件的更换。另外艏段外壳、舯段外壳和艉段外壳的内腔相通,并采用螺丝进行连接,故形成一个只要能安装下拍摄控制系统、垂直推进器、供电系统和两个水平推进器的安装舱体即可,且通过电子密封舱和防水电池盒的设计,无需考虑外壳密封的问题,大大的节约了外壳的制作成本和实现了小型化和轻量化的目的。且第一pcb板、舵机、摄像头和两个水下补光灯均可以采用普通的、非防水器件,节约了水下机器人的制作成本。
18、2、本发明中的外壳采用流线型设计以及微型孔洞的设计,减小了水流的阻力,并采用富有弹性且光滑的光敏树脂材料制作艏段外壳,以使得艏段外壳在处于不同的水流条件下发生轻微形变,减小水流的阻力,提高了机器人的推进效率和降低了使用能耗,延长了水下机器人的待机时间。
19、3、本发明中的舯段外壳的左右两侧向内凹陷,且水平推进器的前端正对舯段外壳的凹陷处,相当于在水平推进器的螺旋桨外缘加装导流罩,可以增加水平推进器的推力和整体效率,减小流体阻力以及减少推进器对周围环境的影响。
20、4、本发明中的水下机器人搭载有垂向推进器和两个水平推进器,可以实现机器人前进、后退、左转、右转、前进与上浮、前进与下沉、后退与上浮和后退与下沉的全方位运动,可以实现峰值保持。
21、5、本发明在艉段外壳内留有浮力材预留空间,在增加水下机器人的任务负载时,通过布置有浮力的材料来提供更大的浮力,调节机器人的平衡。
22、6、本发明的拍摄控制系统采用集成式设计,减小所占空间,进而减小水下机器人的体积,实现轻量化的目的。该机器人总重量不超过2.4千克,在保证功能的同时,实现了低成本、高集成化、易操作、轻便等优势。另外,摄像头在舵机的驱动下可以实现上下翻转,增加水下机器人的观察范围,同时水下补光灯与摄像头布置在同一安装板上,在摄像头翻转的同时,水下补光灯也一同翻转,保证了摄像头拍摄的清晰度,实现了水下娱乐、鱼情探寻、研学培训、水下摄影、窝点鱼情观察、海洋动物观赏等场景的高清晰度的拍摄。
23、7、本发明通过防水充电口的设计,避免了漏水漏电的现象发生。
24、8、本发明设计有电池检测机构,通过12v稳压装置可以稳定输出12v电压给锂电池充电;通过漏水检测装置与提示灯,可以检测并提示是否出现漏水现象,以保护电路安全;通过防水电压表可以实时显示充电电压,保证锂电池不会出现过充或过放的现象。整个电池检测机构设计在一个pcb板上,具有高度集成的特性。
25、9、本发明采用有缆式结构,机器人内无需配置昂贵的传感器用于传输信号和图像,降低成本,且降低了机器人的操作难度;另外,浮标信号器采用图像传输天线传输信号和图像,不再与显示器的上位机相连接,故水下机器人不再受有缆的限制,可以增加下潜的深度;浮标信号器内部的无线模块分别与手柄和图传显示器无线连接,节省成本的同时,还降低了操作难度。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225981.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。