一种仿蝠鲼鱼的扑翼型UDC水下运维机器人
- 国知局
- 2024-08-01 07:21:27
本发明涉及仿生水下机器人装置,特别涉及一种仿蝠鲼鱼的扑翼型udc水下运维机器人。
背景技术:
1、udc海底数据中心是数据中心实现碳中和的重要创新之一。udc由岸站、海底光电复合缆、海底分电站及海底数据舱组成,主体结构为罐体结构,电气设备、冷却系统均布置在罐体内部,罐体顶部为海水冷却系统。可通过庞大的海水流实现对数据舱的冷却,有效降低能耗。
2、蝠鲼鱼通过胸鳍摆动,在低速条件下具有良好的操纵性和稳定性。对蝠鲼鱼胸鳍刚性摆动时的水动力学性能进行仿真分析的基础上,对刚性扑动仿生蝠鲼鱼的结构和控制系统进行设计,形成仿蝠鲼鱼水下机器人,可作为探索和开发海洋的新兴自动化装备。
3、现有的仿蝠鲼鱼扑翼型机器人由于缺少针对udc外壳表面维护的设计,仅能在海水中自由的游动,无法附着贴合在udc外壳的表面,对在udc外壳的表面进行有效的维护。
技术实现思路
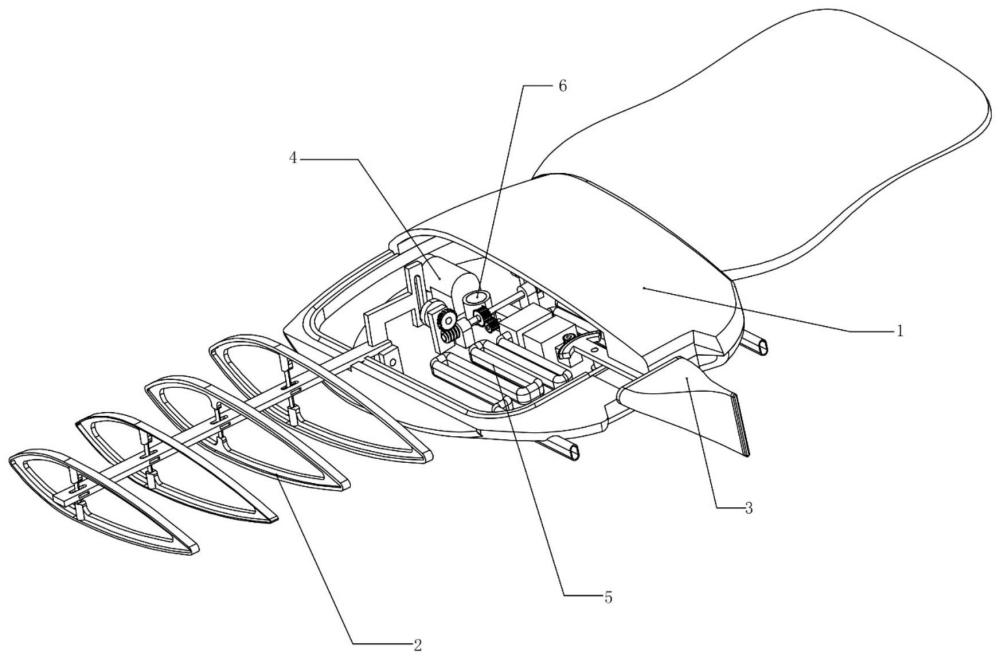
1、针对上述问题,本发明提供一种仿蝠鲼鱼的扑翼型udc水下运维机器人,包括主壳构件、鳍架组件、尾架组件、吸附清理组件、降温组件和探伤模块,所述鳍架组件包括主摆动杆、主摆动连杆、偏心轮、鳍架、外鳍套,所述尾架组件包括尾摆杆、尾鳍套,所述吸附清理组件包括充气气囊、磁条、刷毛,所述降温组件包括回形散热管;
2、两组所述主摆动杆的内端分别旋接在主壳构件的主体内腔中,每组所述主摆动杆的内端都固定连接有主摆动连杆,所述主壳构件主体的内腔中对称的旋接有偏心轮,且两组所述偏心轮的旋心传动连接,同侧的所述偏心轮的偏心端分别滑接在主摆动连杆的内端,每组所述主摆动杆中都安装有轮廓大小不一的鳍架,同侧的所述鳍架与主壳构件的主体外侧之间连接有外鳍套;
3、所述尾摆杆的内端旋接在主壳构件主体内腔的中后部,所述主壳构件主体的后端与尾摆杆之间连接有尾鳍套;
4、所述充气气囊连固在主壳构件主体的外底部,所述充气气囊的底面中部固定连接有磁条,所述磁条的内外两侧都设有刷毛,所述刷毛栽固在充气气囊的底面;
5、所述回形散热管和探伤模块都安装在主壳构件主体的内腔底面。
6、进一步地,所述主壳构件中的底壳体和顶壳体对向固定连接,所述顶壳体的外底面开设有贴合弧面。
7、进一步地,所述鳍架组件中的主摆动座对称的固定在顶壳体的内腔底面,所述底壳体和顶壳体的两侧都开设有主摆动槽,所述主摆动杆穿过主摆动槽后的内端旋转连接在主摆动座中;
8、所述顶壳体的内腔底面还对称的固定连接有底旋座,所述偏心轮的中心轴旋转连接在底旋座中,所述偏心轮的偏心端固定连接有偏心轴,所述偏心轴滑动连接在主摆动连杆的长槽中;
9、所述偏心轮中心轴的另一端还固定连接有蜗轮,所述顶壳体的内腔底面还对称的固定连接有连接轴座,两组所述连接轴座中共同旋转连接有连接轴,所述连接轴的两端都插接固定有蜗杆,同侧的所述蜗杆与蜗轮啮合;
10、所述顶壳体的内腔底面固定安装有主驱电机,所述主驱电机的转轴中插接固定有主驱齿轮,所述连接轴中插接固定有中齿轮,所述中齿轮与主驱齿轮啮合;
11、所述顶壳体的内腔底面固定安装有主控制中心,所述主驱电机与主控制中心电性连接;
12、所述主摆动杆的主体中开设有数组相互交叉的弹性滑槽与侧滑槽,所述鳍架的内中部竖向的固定连接有连接内柱,所述连接内柱滑插在弹性滑槽中;
13、所述连接内柱的中部两侧固定连接有侧滑块,所述侧滑块滑动连接在侧滑槽中;
14、所述连接内柱的中部另外两侧还固定连接有内簧连柱,每组所述内簧连柱中都套接固定有内平衡簧,所述内平衡簧的另一端固定连接在弹性滑槽的内槽中;
15、所述外鳍套的内端连接在底壳体和顶壳体组成的腔体外侧面。
16、进一步地,所述尾架组件中的尾部摆轴固定连接在顶壳体内腔底面的中后部,所述底壳体和顶壳体的中后部共同的开设有尾槽,所述尾摆杆穿过尾槽后的前端旋转连接在尾部摆轴中;
17、所述尾摆杆的后部竖向的固定连接有内架,所述尾鳍套的内后端套固在内架中,所述尾鳍套的前端开口处固定连接在底壳体和顶壳体组成的腔体后侧面;
18、所述尾摆杆的前端还固定连接有扇形结构的半齿环;
19、所述顶壳体的内腔底面还安装固定有尾驱电机,所述尾驱电机的转轴中插接固定有尾驱齿轮,所述尾驱齿轮与半齿环啮合;
20、所述尾驱电机与主控制中心电性连接。
21、进一步地,所述吸附清理组件中的气囊槽开设在贴合弧面中;
22、所述充气气囊的顶端固定连接在气囊槽的槽底;
23、所述充气气囊的顶端中前部连接有充气连接管,所述顶壳体腔体底面的中前部连接有连管密封座,所述顶壳体的内腔底面安装固定有气泵,所述充气连接管的进气端密封穿过连管密封座后与气泵的供气口连接;
24、所述气泵与主控制中心电性连接。
25、进一步地,所述降温组件中的散热管密封座对称的连接在顶壳体后部的左右两侧,所述水泵固定连接在顶壳体内腔中,且与主控制中心电性连接;
26、所述回形散热管的进出水端分别经散热管密封座穿出至主壳构件主体的外部,所述回形散热管的主管路与水泵的进出水端连接。
27、进一步地,所述探伤模块中的探头座固定连接在顶壳体的内腔底面,所述超声波探头安装在探头座中,且所述超声波探头与主控制中心电信号连接。
28、更为进一步地,所述磁条的底端为与贴合弧面一致的曲面结构。
29、更为进一步地,所述气泵供气口与充气连接管进气端之间还连接有泄气阀。
30、更为进一步地,所述回形散热管为铜制回形管结构,且所述回形散热管的进出水端都安装有过滤网。
31、与现有技术相比,本发明具有如下有益效果:
32、(1)本发明以主壳构件中中心对称的设有可摆动的主摆动杆,通过在每组主摆动杆的内端都连接固定有主摆动连杆,利用传动机构带动两组偏心轮同步相向的旋转,可带动两组主摆动杆在一定的范围内同步的摆动,从而可利用简单的机械结构实现本发明的仿生设计;
33、(2)且本发明在主壳构件的中后端还设有可在一定范围内左右摆动的尾摆杆和尾鳍套,可实现该机器人的换向操作;
34、(3)并且本发明在顶壳体的外底端创造性的安装有吸附清理组件,通过将充气气囊设置成可充放气的结构,可实现磁条与刷毛相对于气囊槽的伸出与回收,当磁条和刷毛回收在气囊槽内时,可实现该机器人在udc外壳附近的快速移动,当磁条和刷毛伸出后,可使得该机器人磁力贴合在udc外壳外的表面,并随着该机器人的移动,利用同步伸出的刷毛,可实现对udc外壳上附着的海洋生物进行清理刮除工作;
35、(4)本发明在主壳构件中还安装有降温组件和探伤模块,利用探伤模块可实现对udc外壳的无损探伤工作,快速的检测udc外壳表面的腐蚀情况以及缺陷,并利用降温组件,可消除udc工作散热的局部热点,维护udc的正常运行。
技术特征:1.一种仿蝠鲼鱼的扑翼型udc水下运维机器人,包括主壳构件(1)和探伤模块(6),其特征在于:还包括鳍架组件(2)、尾架组件(3)、吸附清理组件(4)和降温组件(5);
2.根据权利要求1所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述主壳构件(1)包括底壳体(101)和顶壳体(102),所述底壳体(101)和顶壳体(102)对向固定连接,所述顶壳体(102)的外底面开设有贴合弧面(103)。
3.根据权利要求2所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述鳍架组件(2)还包括主摆动座(202),所述主摆动座(202)对称的固定在顶壳体(102)的内腔底面,所述底壳体(101)和顶壳体(102)的两侧都开设有主摆动槽(203),所述主摆动杆(204)穿过主摆动槽(203)后的内端旋转连接在主摆动座(202)中,所述顶壳体(102)的内腔底面还对称的固定连接有底旋座(206),所述偏心轮(207)的中心轴旋转连接在底旋座(206)中,所述偏心轮(207)的偏心端固定连接有偏心轴(208),所述偏心轴(208)滑动连接在主摆动连杆(205)的长槽中,所述偏心轮(207)中心轴的另一端还固定连接有蜗轮(209),所述顶壳体(102)的内腔底面还对称的固定连接有连接轴座(210),两组所述连接轴座(210)中共同旋转连接有连接轴(211),所述连接轴(211)的两端都插接固定有蜗杆(212),同侧的所述蜗杆(212)与蜗轮(209)啮合,所述顶壳体(102)的内腔底面固定安装有主驱电机(214),所述主驱电机(214)的转轴中插接固定有主驱齿轮(215),所述连接轴(211)中插接固定有中齿轮(213),所述中齿轮(213)与主驱齿轮(215)啮合,所述顶壳体(102)的内腔底面固定安装有主控制中心(201),所述主驱电机(214)与主控制中心(201)电性连接,所述外鳍套(217)的内端连接在底壳体(101)和顶壳体(102)组成的腔体外侧面。
4.根据权利要求1、2或3所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述主摆动杆(204)的主体中开设有数组相互交叉的弹性滑槽(219)与侧滑槽(220),所述鳍架(216)的内中部固定连接有连接内柱(218),所述连接内柱(218)滑插在弹性滑槽(219)中,所述连接内柱(218)的中部两侧固定连接有侧滑块(221),所述侧滑块(221)滑动连接在侧滑槽(220)中,所述连接内柱(218)的中部另外两侧还固定连接有内簧连柱(222),每组所述内簧连柱(222)中都套接固定有内平衡簧(223),所述内平衡簧(223)的另一端固定连接在弹性滑槽(219)的内槽中。
5.根据权利要求3所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述尾架组件(3)还包括尾部摆轴(301),所述尾部摆轴(301)固定连接在顶壳体(102)内腔底面的中后部,所述底壳体(101)和顶壳体(102)的中后部共同的开设有尾槽(303),所述尾摆杆(302)穿过尾槽(303)后的前端旋转连接在尾部摆轴(301)中,所述尾摆杆(302)的后部竖向的固定连接有内架(308),所述尾鳍套(304)的内后端套固在内架(308)中,所述尾鳍套(304)的前端开口处固定连接在底壳体(101)和顶壳体(102)组成的腔体后侧面,所述尾摆杆(302)的前端还固定连接有扇形结构的半齿环(307),所述顶壳体(102)的内腔底面还安装固定有尾驱电机(305),所述尾驱电机(305)的转轴中插接固定有尾驱齿轮(306),所述尾驱齿轮(306)与半齿环(307)啮合,所述尾驱电机(305)与主控制中心(201)电性连接。
6.根据权利要求3或5所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述吸附清理组件(4)还包括气囊槽(401),所述气囊槽(401)开设在贴合弧面(103)中,所述充气气囊(402)的顶端固定连接在气囊槽(401)的槽底,所述充气气囊(402)的顶端中前部连接有充气连接管(405),所述顶壳体(102)腔体底面的中前部连接有连管密封座(406),所述顶壳体(102)的内腔底面安装固定有气泵(407),所述充气连接管(405)的进气端密封穿过连管密封座(406)后与气泵(407)的供气口连接,所述气泵(407)与主控制中心(201)电性连接。
7.根据权利要求6所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述磁条(403)的底端为与贴合弧面(103)一致的曲面结构。
8.根据权利要求6所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述气泵(407)供气口与充气连接管(405)进气端之间还连接有泄气阀。
9.根据权利要求3、5、7或8所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述降温组件(5)还包括水泵(502)和散热管密封座(503),所述散热管密封座(503)对称的连接在顶壳体(102)后部的两侧,所述水泵(502)固定连接在顶壳体(102)内腔中,且与主控制中心(201)电性连接,所述回形散热管(501)的进出水端分别经散热管密封座(503)穿出至主壳构件(1)主体的外部,所述回形散热管(501)的主管路与水泵(502)的进出水端连接,所述回形散热管(501)为铜制回形管结构,且所述回形散热管(501)的进出水端都安装有过滤网。
10.根据权利要求3、5、7或8所述的一种仿蝠鲼鱼的扑翼型udc水下运维机器人,其特征在于:所述探伤模块(6)包括探头座(601)和超声波探头(602),所述探头座(601)固定连接在顶壳体(102)的内腔底面,所述超声波探头(602)安装在探头座(601)中,且所述超声波探头(602)与主控制中心(201)电信号连接。
技术总结本发明提供一种仿蝠鲼鱼的扑翼型UDC水下运维机器人,属于仿生水下机器人装置技术领域。包括主壳构件、鳍架组件、尾架组件、吸附清理组件、降温组件和探伤模块,主壳构件的两侧对称的旋设有主摆动杆,通过同一驱动机构可实现主摆动杆同步的摆动,达到驱动本发明移动的目的,且通过尾摆杆带动尾鳍套的摆动,可实现本发明在移动过程中的换向;通过对充气气囊进行充气操作,可使得磁条和刷毛同时伸出到气囊槽的外侧,既能利用磁条吸附到UDC外壳的表面,同时可配合本发明的移动,利用刷毛对附着在UDC外壳表面的海洋生物进行清理和刮除工作;并利用探伤模块以及降温组件配合本发明的移动,可分别达到对UDC外壳表面探伤以及局部散热的目的。技术研发人员:周海峰,张亚恒,倪钰坤,陈鑫,陈星汝,张桂玲,罗成汉,卢其炎,郑东强,林忠华受保护的技术使用者:集美大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/227212.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
现有船舶的利用方法与流程
下一篇
返回列表