用于深海沉积物探测的底栖软体自伸展顶进机器人
- 国知局
- 2024-08-01 07:21:31
本发明涉及深海勘探,具体地,涉及用于深海沉积物探测的底栖软体自伸展顶进机器人。
背景技术:
1、深海沉积物蕴含丰富的生物、矿产资源,同时沉积物也记录了古气候、环境信息,沉积物的研究对于海洋环境保护、资源开发意义重大;海底环境极端且复杂多变,海洋资源的研究开发受限,有效探测研究装备则突显重要。
2、现有的深海钻探设备虽然可以开展海底钻进探测,但存在如下问题:1)结构复杂,现有深海钻进为达到较深的钻探效果大都采用多节杆对接钻进,配装换杆机构、对接结构及辅助装置等,结构复杂可靠性较差;2)底质污染风险高,深海钻探系统多采用液压驱动,存在漏油风险,下水前清洗不足易污染样品;3)钻进探测距离较小,受限于布放回收装置和搭载潜器能力,钻进探测系统重量、支持功率和钻杆长度较小;4)探测取样路径不可控,深海钻探系统坐底后,钻杆垂向钻进,路径不可控。
技术实现思路
1、针对现有技术中现有深海钻探设备存在结构复杂可靠性差、底质污染风险高、钻进探测距离小、探测取样路径不可控的缺陷,本发明的目的是提供一种用于深海沉积物探测的底栖软体自伸展顶进机器人。采用高压充水软体伸展顶进尖端刺入沉积物、射流液化减阻、肤膜突刺和软体充水膨胀锚固,电磁铁吸合和骨架导向弹簧复位方式,实现沉积物的深层路径可控刺入探测与采样。
2、根据本发明提供的一种用于深海沉积物探测的底栖软体自伸展顶进机器人,包括底栖平台本体、自伸展软体、中心双层射流软管以及仿生顶进尖端机构,自伸展软体和中心双层射流软管一端分别连接于底栖平台本体上,中心双层射流软管另一端穿入自伸展软体与仿生顶进尖端机构连接,且仿生顶进尖端机构连接自伸展软体;
3、底栖平台本体控制高压水沿中心双层射流软管至仿生顶进尖端机构射流液化沉积物,并控制自伸展软体充水外翻伸展,推进仿生顶进尖端机构顶进。
4、优选的,仿生顶进尖端机构包括中心支架、仿生尖端壳、转向电磁铁以及自复位骨架导向弹簧,仿生尖端壳内部设有中心支架,转向电磁铁和自复位骨架导向弹簧分别连接于中心支架上;
5、仿生顶进尖端机构在自伸展软体伸展的推动作用下克服沉积物阻力产生前向顶进运动,转向电磁铁单个通电使得仿生顶进尖端机构转向,断电后自复位骨架导向弹簧迫使仿生顶进尖端机构恢复中位。
6、优选的,中心支架和仿生尖端壳之间填充有硅脂,且通过密封隔膜隔阻;
7、硅脂为仿生尖端壳提供刚性,密封隔膜阻隔硅脂溢出,且通过密封隔膜防止外界泥土进入仿生顶进尖端机构。
8、优选的,转向电磁铁包括电磁线圈、导磁坑以及方形铁片,电磁线圈和导磁坑镶嵌在仿生尖端壳内部四周,方形铁片镶嵌在中心支架四周;
9、导磁坑和方形铁片吸合发生转向,导磁坑和方形铁片分离保持平衡。
10、优选的,自复位骨架导向弹簧包括自复位骨架和导向弹簧,自复位骨架一端镶嵌在中心支架四周,自复位骨架另一端处于仿生尖端壳内部扇形区域中心;
11、压缩导向弹簧给尖端提供转向空间,伸展导向弹簧使仿生尖端壳恢复平衡。
12、优选的,自伸展软体上设有锥形锚定装置,自伸展软体充水翻转后,锥形锚定装置在自伸展软体膨胀力的作用下刺入沉积物实现锚定;
13、自伸展软体内部设有橡胶隔层和磁环,自伸展软体通过橡胶隔层和磁环与中心支架滑动密封连接。
14、优选的,底栖平台本体包括主体支架、主控模组、高压水动力及配流调节模组、软体存储模组以及射流软管存储模组,主控模组连接位于主体支架内的高压水动力及配流调节模组,射流软管存储模组通过中心双层射流软管连接软体存储模组;
15、高压水动力及配流调节模组包括主水泵、次水泵、蓄能器和电动调节阀,主水泵和次水泵分别连接蓄能器,蓄能器连接电动调节阀;
16、主水泵、次水泵产生作业用高压水,蓄能器稳定水压及作业过程产生的波动;主控器通过电动调节阀控制高压水沿自伸展软体至仿生顶进尖端机构射流液化沉积物,同时控制软体充水外翻伸展,推进尖端顶进。
17、优选的,软体存储及释放模组包括密封圆柱腔体和出口剪断装置,自伸展软体收缩储存在密封圆柱腔体内,且自伸展软体外翻身体固定连接在密封圆柱腔体上,且软体机器人完成工作后通过剪断装置进行剪断处理;
18、密封圆柱腔体一端上设有滑动密封装置,密封圆柱腔体另一端上设有固定环;滑动密封装置保持密封圆柱腔体压力的同时使得中心双层射流软管进入;自伸展软体外翻身体初始端通过固定环固定连接在密封圆柱腔体上,使得密封圆柱腔体和自伸展软体形成一个密封腔体。
19、优选的,射流软管存储及释放模组包括射流软管绞车、高压水滑环以及中心双层射流软管,中心双层射流软管一端连接于射流软管绞车,射流软管绞车侧边连接有高压水滑环,中心双层射流软管另一端插入密封圆柱腔体中,进而通入自伸展软体中心。
20、优选的,中心双层射流软管包括内层射流管、外层电缆以及电线管,内层射流管外设有外层电缆,外层电缆外部包裹有电线管;
21、中心双层射流软管连接仿生顶进尖端机构的射流孔,自伸展软体顶进仿生顶进尖端机构时,仿生顶进尖端机构带动中心双层射流软管在机器人内部向前移动。
22、与现有技术相比,本发明具有如下的有益效果:
23、(1)本发明的底栖软体自伸展顶进沉积物探测取样机器人引入了注水连续柔性伸展材料,解决了连续钻进距离和钻杆更换和对接问题,结构简单可靠;
24、(2)本发明动力驱动方面,采用水泵直接抽取环境海水加压驱动软体伸展,环境污染小,避免样品污染;
25、(3)本发明采用尖端伸展和射流液压减阻方案,避免杆体与介质的移动摩擦,降低尖端顶进阻力,能耗低;
26、(4)本发明通过转向电磁铁和骨架导向复位弹簧控制尖端顶进方向和路径,实现沉积物深层探测取样路径和点有效可控。
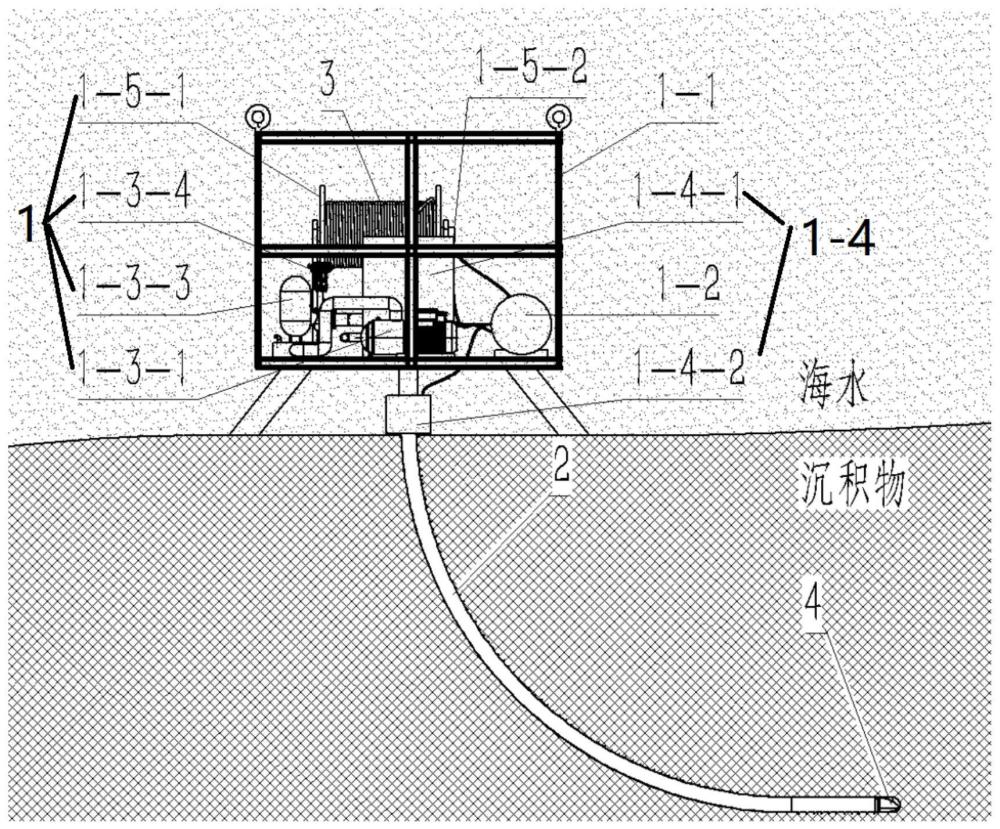
技术特征:1.一种用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,包括底栖平台本体(1)、自伸展软体(2)、中心双层射流软管(3)以及仿生顶进尖端机构(4),所述自伸展软体(2)和所述中心双层射流软管(3)一端分别连接于所述底栖平台本体(1)上,所述中心双层射流软管(3)另一端穿入所述自伸展软体(2)与所述仿生顶进尖端机构(4)连接,且所述仿生顶进尖端机构(4)连接所述自伸展软体(2);
2.根据权利要求1所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述仿生顶进尖端机构(4)包括中心支架(4-1)、仿生尖端壳(4-2)、转向电磁铁(4-3)以及自复位骨架导向弹簧(4-4),所述仿生尖端壳(4-2)内部设有所述中心支架(4-1),所述转向电磁铁(4-3)和所述自复位骨架导向弹簧(4-4)分别连接于所述中心支架(4-1)上;
3.根据权利要求2所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述中心支架(4-1)和所述仿生尖端壳(4-2)之间填充有硅脂(4-6),且通过密封隔膜(4-5)隔阻;
4.根据权利要求2所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述转向电磁铁(4-3)包括电磁线圈(4-3-1)、导磁坑(4-3-2)以及方形铁片(4-3-3),所述电磁线圈(4-3-1)和所述导磁坑(4-3-2)镶嵌在所述仿生尖端壳(4-2)内部四周,所述方形铁片(4-3-3)镶嵌在所述中心支架(4-1)四周;
5.根据权利要求2所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述自复位骨架导向弹簧(4-4)包括自复位骨架(4-4-1)和导向弹簧(4-4-2),所述自复位骨架(4-4-1)一端镶嵌在所述中心支架(4-1)四周,所述所述自复位骨架(4-4-1)另一端处于所述仿生尖端壳(4-2)内部扇形区域中心;
6.根据权利要求2所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述自伸展软体(2)上设有锥形锚定装置(2-1),所述自伸展软体(2)充水翻转后,所述锥形锚定装置(2-1)在所述自伸展软体(2)膨胀力的作用下刺入沉积物实现锚定;
7.根据权利要求2所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述底栖平台本体(1)包括主体支架(1-1)、主控模组(1-2)、高压水动力及配流调节模组(1-3)、软体存储模组(1-4)以及射流软管存储模组(1-5),所述主控模组(1-2)连接位于主体支架(1-1)内的所述高压水动力及配流调节模组(1-3),所述射流软管存储模组(1-5)通过所述中心双层射流软管(3)连接所述软体存储模组(1-4);
8.根据权利要求7所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述软体存储及释放模组(1-4)包括密封圆柱腔体(1-4-1)和出口剪断装置(1-4-2),所述自伸展软体(2)收缩储存在所述密封圆柱腔体(1-4-1)内,且所述自伸展软体(2)外翻身体固定连接在所述密封圆柱腔体(1-4-1)上,且软体机器人完成工作后通过所述剪断装置(1-4-2)进行剪断处理;
9.根据权利要求8所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述射流软管存储及释放模组(1-5)包括射流软管绞车(1-5-1)、高压水滑环(1-5-2)以及所述中心双层射流软管(3),所述中心双层射流软管(3)一端连接于所述射流软管绞车(1-5-1),所述射流软管绞车(1-5-1)侧边连接有所述高压水滑环(1-5-2),所述中心双层射流软管(3)另一端插入所述密封圆柱腔体(1-4-1)中,进而通入所述自伸展软体(2)中心。
10.根据权利要求2所述的用于深海沉积物探测的底栖软体自伸展顶进机器人,其特征在于,所述中心双层射流软管(3)包括内层射流管(3-1)、外层电缆(3-2)以及电线管(3-3),所述内层射流管(3-1)外设有所述外层电缆(3-2),所述外层电缆(3-2)外部包裹有所述电线管(3-3);
技术总结本发明提供了一种涉及深海勘探技术领域的用于深海沉积物探测的底栖软体自伸展顶进机器人,包括底栖平台本体、自伸展软体、中心双层射流软管以及仿生顶进尖端机构,自伸展软体和中心双层射流软管一端分别连接于底栖平台本体上,中心双层射流软管另一端穿入自伸展软体与仿生顶进尖端机构连接,且仿生顶进尖端机构连接自伸展软体;采用充水软体伸展、仿生尖端顶进、肤膜突刺锚固和沉积物液化减阻,实现沉积物的深层控向刺入探测与采样;主控模组调控软体充水外翻伸展,推动仿生尖端顶进挤压刺入沉积物,利用电磁铁吸合和复位弹簧控制尖端转向及复位。本发明应用于沉积物深层探测及取样,具有能耗低、环境破坏小,沉积物中探测取样路径可控等优点。技术研发人员:王猛,吴超,冯钊,段萧受保护的技术使用者:上海交通大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/227225.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表