基于鱼类AI识别的便携式在线监测设备的制作方法
- 国知局
- 2024-08-01 07:23:16
本发明涉及水下机器人,具体为一种基于鱼类ai识别的便携式在线监测设备。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种,水下机器人的应用范围十分广泛,可用于检查大坝、桥墩上是否安装爆炸物以及结构好坏情况;遥控侦察、危险品靠近检查;水下基阵协助安装、拆卸;船侧、船底物品检测;水下目标观察,废墟、坍塌矿井搜救等。
2、现有的水下机器人大部分整理重量较大,在应用于水下鱼类监测方面时,常常存在一以下缺点:推进器噪音大,鱼类在收到其干扰后会迅速原理,无法实施拍摄;推进器的推力造成的水流会增加水体浊度,影响摄像机的拍摄距离及摄像效果;机器人设备一般为带线式,地面需配置电缆及用电设备,设备庞大不便携,准备工作多,效果差,不适宜鱼类识别。
3、公开号为cn116714748b的中国发明专利公开了一种具有鱼类检测功能的水下生物机器人,该发明包括本体,本体设置有监测组件,本体两侧安装有防护架,防护架设置有缓冲组件。该生物机器人通过转动电机带动主动齿轮转动,使得转动板带动监测摄像头进行转动,使得监测摄像头的拍摄范围得到扩大,然而该机器人仅适用于水底鱼类监测,对于难以捕捉浅水区域画面。
4、公开号为kr101313546b1的韩国发明专利公开了一种浮标式照相机器人,该机器人包括浮体,浮体上安装有推进单元以及监控单元,浮体上具有无线通信部件,该发明能通过控制推进器来实现 浮体的移动,以保证监控单元能对目标位置进行监测。该装置在应用与鱼类识别和监测时,在以下技术问题上存在改进空间:监控设备在水下容易晃动,导致画面模糊;推进器推进产生噪声,容易惊扰鱼群。
技术实现思路
1、本发明的目的在于提供一种具有稳定性的基于鱼类ai识别的便携式在线监测设备。
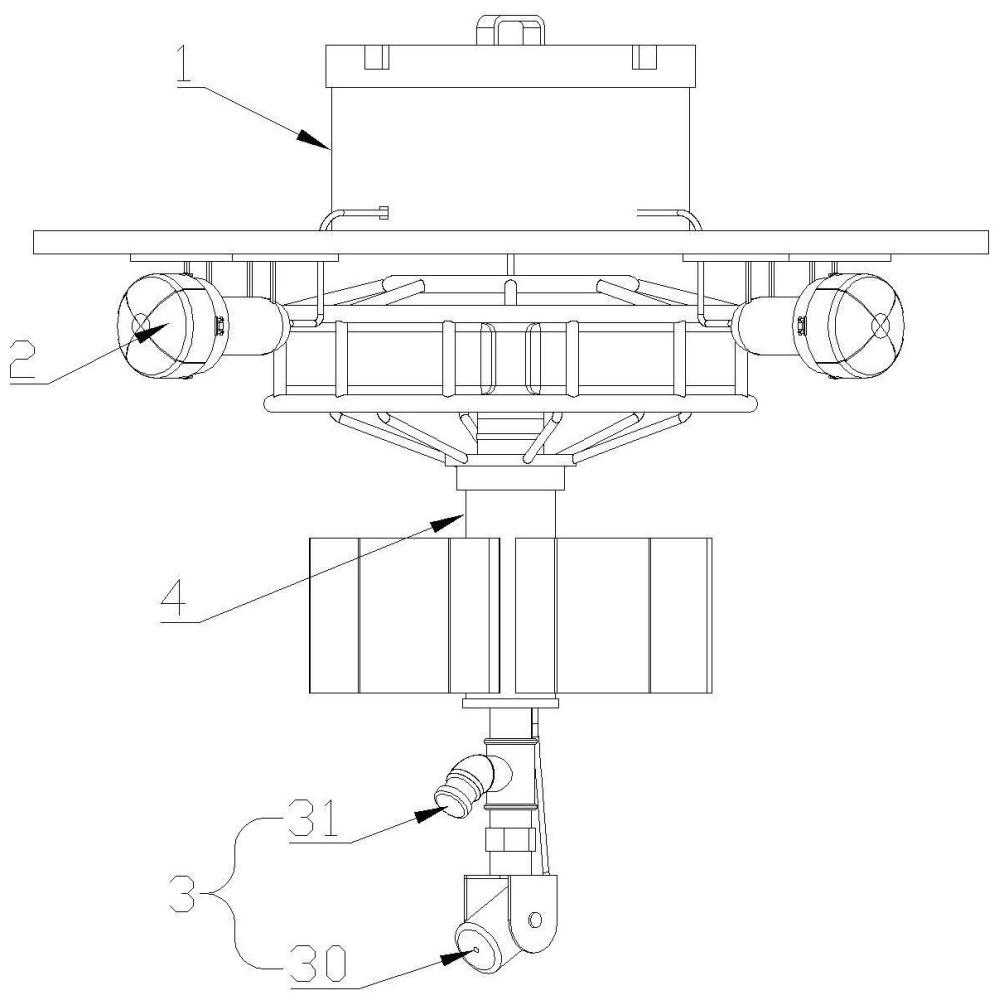
2、基于鱼类ai识别的便携式在线监测设备,包括,浮标、推进器、摄像系统和引鱼组件,推进器用于浮标在水面移动,引鱼组件包括设于浮标底部的框架,框架下方设有套筒,套筒内外连通且内置有鱼饵,摄像系统包括与套筒连接的摄像头,摄像头用于对鱼类监测和识别。浮标漂浮于水面上,通过推进器到达目标监测区域后,利用摄像头对水下鱼群进行识别、拍摄,实现定点监测,监测期间,套筒内的鱼饵能够向外发散,从而吸引多种鱼群摄像头,以获得清晰的画面,有助于提高识别正确率,由于浮标漂浮于水面,与浮标连接的推进器距离底部的摄像头距离较远,一方面防止推进器的噪声惊扰鱼群,导致摄像头无法捕捉到鱼类画面,另一方面避免推进器引起水底沉积物悬浮浑浊水体,保证了检测稳定性。
3、优选地,摄像系统还包括补光灯,补光灯与摄像头配合连接。补光灯用于在昏暗的水下环境下提供照明,以帮助摄像头能清楚地捕捉到鱼群的画面并加以识别。
4、优选地,摄像系统还包括与摄像头配设的监视器。摄像头所拍摄到的画面实时传送到监视器,以供地面人员观察、分析和数据统计,画面数据最终可根据拍摄的种类,结合水体的水质、流量等综合数据,对水体的生态评价提供有效的生物数据。
5、优选地,浮标具有控制仓,控制仓用于控制推进器以及摄像系统。通过控制仓能够分别驱动各个推进器,从而实现浮标在水面上的前景、后退以及转向,便于实现快速、定点的监测,提高了效率和准确度。
6、优选地,套筒转动连接在框架下方,套筒侧方环绕设置有叶板,套筒在相邻叶板之间阵列开设通槽,套筒顶部与框架转动连接,套筒内活动连接有饵仓,饵仓用于放置鱼饵。框架和套筒使推进器与摄像头存在高度间隔距离,避免推进器噪声惊扰鱼群,在水面下方存在侧方扰流,扰流作用叶板使套筒相对框架旋转对水流冲击消耗,从而稳定摄像头防止其过分晃动导致画面模糊,有助于提高监测稳定性;
7、叶板旋转时带动套筒旋转,同时带动套筒内侧设置的饵仓旋转,此时饵仓内的鱼饵在旋转作用下通过通槽向外扩散,提高了引诱范围,有助于摄像机在有限视角内捕捉到更多的鱼类画面,提高了监测效率,从而实现摄像头的能耗节省;
8、旋转的叶板也能带动摄像头进行方位的调整,便于摄像头获取范围更大的监测画面,提高了监测准确性。
9、优选地,饵仓包括内套和外套,内套在外套内侧上方滑动连接,内套和外套分别与套筒的顶部和底部之间连接有弹簧,外套内设有螺杆,内套内设有与螺杆配设的螺纹套,外套侧壁阵列设有通孔。内套与外套可拆卸式连接,,二者形成的内部腔体用于防止鱼饵,外侧水体横向流动时,能够经过通槽到达内部并作用内套和外套,使得内套和外套通过挤压弹簧发生晃动,弹簧实现饵仓在套筒内高度居中的同时,通过形变进一步稳定摄像头,提高监测画面清晰程度;
10、弹簧受压时,内套相对外套发生滑移,在螺杆与螺纹套的配合设置下,内套相对外套滑动的同时发生旋转,有助于腔体内鱼饵的均匀搅拌,一方面提高引诱鱼群的效果,提高监测效果,另一方面旋转的内套有助于刮除堵塞在通孔的泥沙等,防止鱼饵难以向外扩散吸引鱼群。
11、优选地,框架内侧设有支架,套筒与支架底部转动连接,支架外侧与框架内侧之间环绕设置有气囊,单个气囊能够被控制充气和放气,支架设有配重柱,配重柱上套设有配重环。框架能形成套筒与浮标的装配,在不使用时,套筒与框架不形成组装,浮体依靠框架形成底部支撑,防止移动磨损;
12、通过单个气囊充气个放气,能使得框架在水中的姿态发生倾斜,从而带动底部设置的摄像头调整角度,便于应对坑洼水底,保证摄像头监控画面有效,通过多个气囊同步同步充气放气,能够改变框架以及底部摄像头在水中的高度位置,从而实现拍摄画面的高度调节,一方面有助于获取准确、清晰、有效的鱼类监测画面,另一方面使装置能适应不同水深区域的监测,提高了适应性。
13、环绕设置的气囊还能对噪声吸收,进一步减小推进器噪声干扰鱼群的问题。
14、优选地,配重柱侧方开设有上下贯通的线槽,摄像头连接有线缆,线缆能安装于线槽内,配重环具有能通过线缆的开口,配重环能在配重柱上转动。摄像头连接到控制仓的线缆能通过配重柱的线槽收纳,安装时,首先将线缆部分置入线槽中,再在配重柱上套接配重环,最底部的配重环的开口与线槽对齐,保证线缆进入线槽,再继续套设配重环,并将后套设的配重环的开口与线槽错位,实现线缆在线槽内的限位,实现了收纳,防止摄像头线缆在水中飘散与外界物体发生捆绑导致装置整体无法移动卡死,同时也根据装置所处位置的水密度进行配种调节,保证装置稳定漂浮。
15、优选地,配重环的外侧设置有灯带,配重环位于气囊的内侧。配重环外侧的灯带能在水面下方的空间进行发光警示,便于人员发现回收,也防止夜间渔船意外碰撞可能,且灯带位于气囊内侧,降低了侧方撞击引起灯带损坏的可能,降低了维护成本。
16、本发明与现有技术相比较具有如下有益效果:浮标依靠推进器能实现移动式监测和定点监测,具有机动灵活性;摄像头通过引鱼组件设于浮标底部,降低了噪声干扰鱼群的可能,提高监测效果;推进器远离摄像头,防止推力引起水浑浊导致画面不清楚;套筒通过叶板对侧方水流消能,稳定监测画面;旋转的套筒实现摄像方位自调整,提高检测范围;旋转的套筒和叶板对鱼饵扩散,提高鱼群积聚效果;水流波动促进饵仓旋转和挤压,有利于搅匀鱼饵提高引鱼效果;旋转的内套和外套实现自清洁,防止泥沙堵塞通孔影响引鱼效果;气囊通过充放气能调节摄像头倾角,保证视野清晰、有效;气囊充、放气能调整摄像头水下高度,实现固定水深监测,提高适应性;配重柱和配重环能通过装配对线缆收纳,降低线缆缠绕或受损可能,提高安全性和稳定性。因此,本发明是一种具有稳定性的基于鱼类ai识别的便携式在线监测设备。
本文地址:https://www.jishuxx.com/zhuanli/20240722/227352.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表