一种基于计算机视觉的船槽定位方法及定位设备
- 国知局
- 2024-08-01 07:50:25
本发明涉及计算机应用,更具体地说,涉及一种基于计算机视觉的船槽定位方法及定位设备。
背景技术:
1、计算机俗称电脑,是现代一种用于高速计算的电子计算机器,可以进行数值计算,又可以进行逻辑计算,还具有存储记忆功能,是能够按照程序运行,自动、高速处理海量数据的现代化智能电子设备,由硬件系统和软件系统所组成,没有安装任何软件的计算机称为裸机;
2、计算机视觉是使用计算机及相关设备对生物视觉的一种模拟。它的主要任务就是通过对采集的图片或视频进行处理以获得相应场景的三维信息,就像人类和许多其他类生物每天所做的那样,对船槽进行定位时,一般需要使用到定位设备,通过计算机视觉对船槽进行定位。
3、但现有的定位设备,在对船槽进行定位前,一般会移动到船槽附近,采集的图片或视频,船体一般会停泊在浅滩处,定位设备移动至船体底部前,需要通过泥泞道路,履带上通常会粘连泥土,不进行清理,会加重设备的质量,从而使设备更为耗电,容易影响设备的采集,而设备在水里移动时,可能会有部分漂浮物附着在设备的拍摄处,对图片的采集造成影响,对此提供了一种基于计算机视觉的船槽定位方法及定位设备来解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于计算机视觉的船槽定位方法及定位设备,解决了定位设备,在对船槽进行定位前,一般会移动到船槽附近,采集的图片或视频,船体一般会停泊在浅滩处,定位设备移动至船体底部前,需要通过泥泞道路,履带上通常会粘连泥土,不进行清理,会加重设备的质量,从而使设备更为耗电,容易影响设备的采集,而设备在水里移动时,可能会有部分漂浮物附着在设备的拍摄处,对图片采集造成影响的问题。
3、(二)技术方案
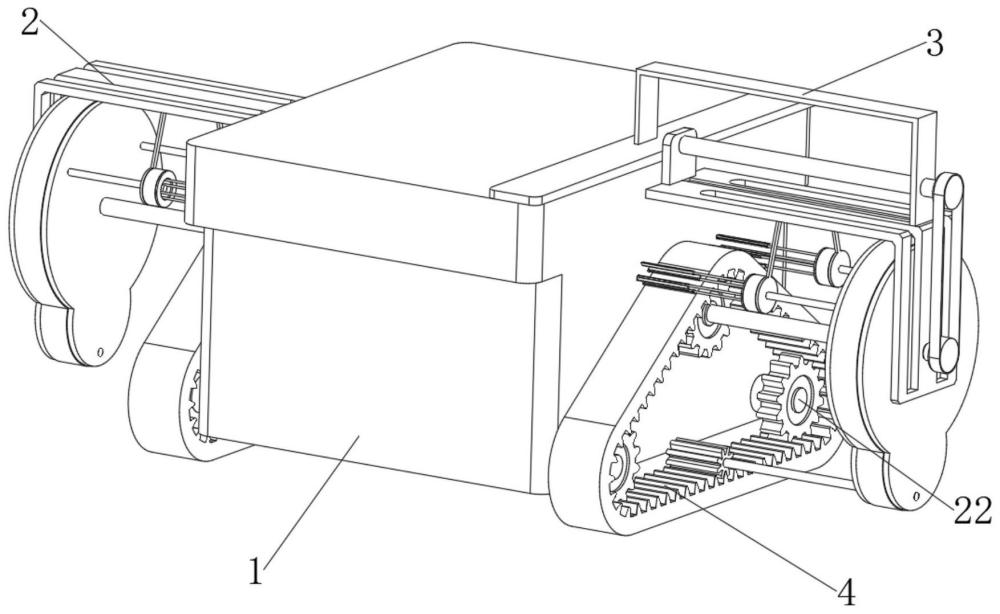
4、为实现上述所述目的,本发明提供如下技术方案:一种基于计算机视觉的船槽定位方法及定位设备,包括定位机器人,所述定位机器人的左右两侧均活动设有履带轮组件,所述履带轮组件的表面活动套设有履带本体,所述定位机器人的左右两侧均固定设有l型板,所述l型板的内腔通过轴承活动连接有第一转杆,所述第一转杆的表面固定套设有第一齿轮,所述第一齿轮的表面啮合有第二齿轮,所述第二齿轮的内腔固定连接有第二转杆,所述第二转杆的表面固定设有清泥组件,右侧的l型板的顶部固定设有清理组件;
5、所述清理组件包括有第一支撑板,所述第一支撑板的内腔通过轴承活动连接有往复丝杆,所述往复丝杆的表面螺纹套设有u型架,所述u型架右侧的底部与l型板的内腔滑动连接,所述u型架左侧的底部固定连接有刷板,所述往复丝杆和第一转杆的表面均固定套设有第一同步轮,所述第一同步轮的表面活动套设有第一同步带;
6、所述清泥组件包括有连接环,所述连接环的内圈固定设有齿圈,所述第二转杆的表面固定套设有齿轮环,所述齿轮环的表面啮合有第三齿轮,所述第三齿轮的表面与齿圈的内圈相啮合,所述第三齿轮的内腔固定连接有第三转杆,所述第三转杆靠近定位机器人的一端固定连接有清理铲。
7、优选的,所述刷板的底部与定位机器人的顶部相贴合,所述第一支撑板的底部与右侧的l型板的顶部固定连接。
8、优选的,所述连接环外侧的表面固定连接有第二支撑板,所述第二支撑板的内腔与第二转杆的表面通过轴承活动连接,所述第二支撑板靠近定位机器人的一侧固定连接有第一容纳框,所述第一容纳框靠近定位机器人的一侧固定连接有限位环,所述第二转杆靠近定位机器人的一端固定连接有限位圈,所述第二支撑板的表面固定连接有第三支撑板,所述第三支撑板的顶部与l型板的底部固定连接。
9、优选的,所述第三齿轮的数量为八个,四个第三齿轮为一组且呈环形阵列分布,所述清理铲的数量为八个,四个清理铲为一组且呈环形阵列分布,底部的清理铲与履带本体的表面相抵合。
10、优选的,所述清理铲的底部开设有刮槽,所述清理铲的顶部开设有出泥槽。
11、优选的,所述第二齿轮的数量为两组,两个第二齿轮为一组且呈前后对称分布。
12、优选的,所述第一转杆的表面活动套设有第一保护板,所述第一保护板外侧的表面与l型板内侧的表面固定连接,所述第一保护板靠近定位机器人的一侧固定连接有第二容纳框,所述第二容纳框靠近定位机器人的一侧固定连接有第二保护板,所述第二保护板的内腔与第二转杆的表面通过轴承活动连接,所述第二保护板和第一保护板的内腔通过轴承活动连接有第四转杆,所述第四转杆靠近定位机器人的一端固定设有清理辊,所述清理辊的表面与履带本体的内圈相抵合。
13、优选的,所述第一转杆和第四转杆的表面均固定套设有第二同步轮,所述第二同步轮的表面活动套设有第二同步带。
14、优选的,所述定位机器人的顶部固定设有定位组件。
15、优选的,所述一种基于计算机视觉的船槽定位方法及定位设备,使用步骤如下:
16、步骤一:
17、履带本体在浅滩移动时,履带本体的表面会粘连泥土,此时顶部的履带轮组件会带动第一转杆进行转动,使得顶部的第二同步轮开始转动,从而通过第二同步带带动底部的第二同步轮同步转动,使得底部的第二同步轮带动第四转杆进行转动,从而带动清理辊进行转动,对履带本体内圈上附着的泥土进行清理。
18、步骤二:
19、第一转杆转动的同时会带动第一齿轮进行转动,使得第一齿轮带动前后两侧的两个第二齿轮同步转动,通过设置的第二保护板,使得第二转杆限位,第二转杆仅能在原处进行转动,从而使得两个第二齿轮带动第二转杆在原处进行转动,使得齿轮环开始转动,通过设置的第二支撑板和第三支撑板,使得连接环固定,连接环固定后,当齿轮环转动时,四个与齿轮环和齿圈啮合的第三齿轮开始同步转动,在连接环的内腔做行星环绕运动,通过设置的限位环,使得第三齿轮限位,防止第三齿轮脱落的情况发生,第三齿轮在转动的同时会带动第三转杆同步进行行星环绕运动,使得清理铲对履带本体表面上的泥土进行清除,通过设置多组清理铲,使得履带本体上的泥土可以甩在水中,从而避免泥土附着而增加设备的质量,避免设备更为耗电,便于设备的采集;
20、步骤三:
21、第一转杆转动的同时会带动底部的第一同步轮进行转动,通过设置的第一同步带,使得底部的第一同步轮可以带动顶部的第一同步轮同步转动,从而使得往复丝杆开始转动,通过右侧l型板上设置的滑槽,使得u型架只能做水平运动,使得u型架水平往复移动,带动刷板对定位机器人的顶部进行清理,设备在水里移动时,可能会有部分漂浮物附着在设备的拍摄处,通过设置的刷板,扫除漂浮物,便于设备对船槽处进行采集拍摄。
22、(三)有益效果
23、与现有技术相比,本发明提供了一种基于计算机视觉的船槽定位方法及定位设备,具备以下有益效果:
24、1、该基于计算机视觉的船槽定位方法及定位设备,通过顶部的履带轮组件会带动第一转杆进行转动,使得顶部的第二同步轮开始转动,从而通过第二同步带带动底部的第二同步轮同步转动,使得底部的第二同步轮带动第四转杆进行转动,从而带动清理辊进行转动,对履带本体内圈上附着的泥土进行清理,第一转杆转动的同时会带动第一齿轮进行转动,使得第一齿轮带动前后两侧的两个第二齿轮同步转动,通过设置的第二保护板,使得第二转杆限位,第二转杆仅能在原处进行转动,从而使得两个第二齿轮带动第二转杆在原处进行转动,使得齿轮环开始转动,通过设置的第二支撑板和第三支撑板,使得连接环固定,连接环固定后,当齿轮环转动时,四个与齿轮环和齿圈啮合的第三齿轮开始同步转动,在连接环的内腔做行星环绕运动,通过设置的限位环,使得第三齿轮限位,防止第三齿轮脱落的情况发生,第三齿轮在转动的同时会带动第三转杆同步进行行星环绕运动,使得清理铲对履带本体表面上的泥土进行清除,通过设置多组清理铲,使得履带本体上的泥土可以甩在水中,从而避免泥土附着而增加设备的质量,避免设备更为耗电,便于设备的采集。
25、2、该基于计算机视觉的船槽定位方法及定位设备,通过设置的第一转杆转动,带动底部的第一同步轮进行转动,通过设置的第一同步带,使得底部的第一同步轮可以带动顶部的第一同步轮同步转动,从而使得往复丝杆开始转动,通过右侧l型板上设置的滑槽,使得u型架只能做水平运动,使得u型架水平往复移动,带动刷板对定位机器人的顶部进行清理,设备在水里移动时,可能会有部分漂浮物附着在设备的拍摄处,通过设置的刷板,扫除漂浮物,便于设备对船槽处进行采集拍摄。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229116.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。