线控转向变传动比控制方法、控制系统及其车辆与流程
- 国知局
- 2024-08-01 07:58:29
本发明涉及车辆,尤其涉及一种线控转向变传动比控制方法、控制系统及其车辆。
背景技术:
1、对于线控转向系统来说,由于路感模拟器与线控转向执行器之间取消了中间轴机械连接,因此线控转向系统可以进行变传动比控制,变传动比控制可以在不同的驾驶模式、不同的车速等条件下通过不同的驾驶员输入从而提供不同的车辆转角输出。然而,在当前的变传动比决策算法中存在普遍性的痛点问题,在切换驾驶模式和车速明显变化的情况下,此时的变传动比输出的执行转向角度存在偏差,驾驶员会感觉到明显的车辆失稳、过多转向、不足转向等现象,存在车辆失稳风险。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种线控转向变传动比控制方法,能够有效避免潜在的车辆失稳风险,提高线控转向控制系统的用户驾乘体验。
2、本发明还提供包括线控转向控制系统、车辆控制器及其车辆。
3、根据本发明实施例第一方面的线控转向变传动比控制方法,包括:
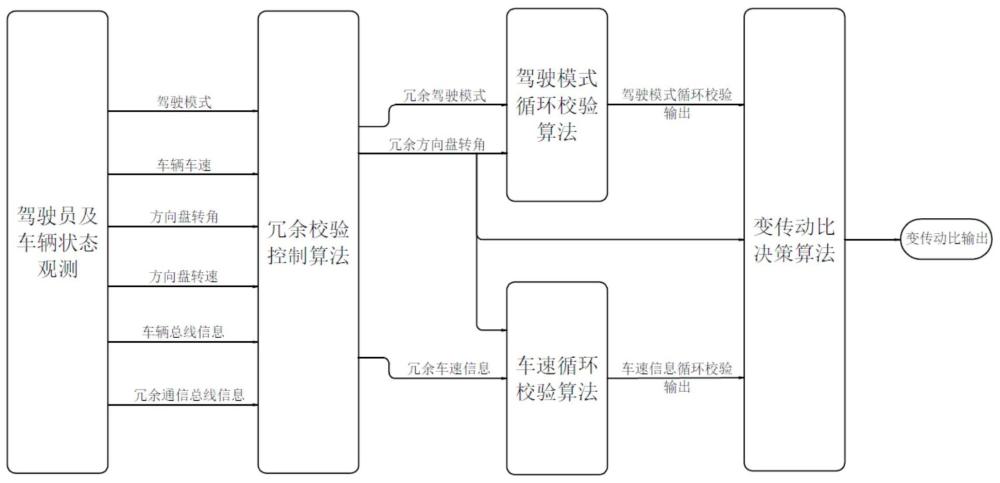
4、获取车辆的状态信息,并将所述状态信息输入到冗余校验控制算法进行冗余处理,得到冗余控制信息;
5、根据所述冗余控制信息进行输出处理,得到驾驶模式循环校验输出和车速信息循环校验输出;
6、根据所述驾驶模式循环校验输出和所述车速信息循环校验输出进行变传动比决策计算,得到决策后的变传动比;
7、利用决策后的所述变传动比对线控转向系统进行变传动比控制。
8、根据本发明实施例的线控转向变传动比控制方法,至少具有如下有益效果:
9、将获取的车辆的状态信息输入到冗余校验控制算法进行冗余处理,提供高安全的冗余控制信息,以提高安全性;并通过对冗余控制信息进行输出处理,以得到驾驶模式循环校验输出和车速信息循环校验输出,然后将经过校验输出的内容进行变传动比决策计算,将决策后的变传动比作为对外输出进行变传动比控制,实现线控转向的变传动比功能,通过设计提升车辆稳定性的线控转向变传动比控制策略,解决了线控转向控制系统在不同驾驶模式切换、不同车速变化情况下由于变传动比输出引发的车辆稳定性问题,避免潜在的车辆失稳风险,提高用户驾乘体验。
10、根据本发明的一些实施例,所述状态信息包括驾驶模式、驾驶模式切换请求和方向盘转角,所述根据所述冗余控制信息进行输出处理,得到驾驶模式循环校验输出和车速信息循环校验输出,包括:
11、根据所述驾驶模式确定所述车辆的当前驾驶模式;
12、当接收到所述驾驶模式切换请求,利用驾驶模式循环校验算法判断当前的所述方向盘转角是否在第一预设范围;
13、当所述方向盘转角在所述第一预设范围内,执行切换所述车辆的驾驶模式;
14、当所述方向盘转角超出所述第一预设范围,维持所述车辆的当前驾驶模式。
15、根据本发明的一些实施例,所述状态信息包括车辆车速和方向盘转角,所述根据所述冗余控制信息进行输出处理,得到驾驶模式循环校验输出和车速信息循环校验输出,包括:
16、获取当前的所述车辆车速;
17、当接收到所述车辆车速的控制命令,利用车速循环校验算法判断当前的所述方向盘转角是否在第二预设范围;
18、当所述方向盘转角在所述第二预设范围内,执行更新所述车辆车速;
19、当所述方向盘转角超出所述第二预设范围,维持当前的所述车辆车速。
20、根据本发明的一些实施例,所述当所述方向盘转角在所述第二预设范围内,执行更新所述车辆车速之后,还包括:
21、获取更新后的所述车辆车速和上一时刻的所述车辆车速,并进行对比;
22、当更新后的所述车辆车速与上一时刻的所述车辆车速之间的车速差在第三预设范围内,继续执行更新所述车辆车速。
23、根据本发明的一些实施例,所述当所述方向盘转角在所述第二预设范围内,执行更新所述车辆车速之后,还包括:
24、当更新后的所述车辆车速与上一时刻的所述车辆车速之间的车速差超出所述第三预设范围,根据车速跟随算法对当前的所述车辆车速进行控制,以控制所述车辆车速的变化幅度。
25、根据本发明的一些实施例,所述状态信息包括方向盘转角,所述驾驶模式循环校验输出包括经过驾驶模式循环校验算法处理得到的驾驶模式,所述车速信息循环校验输出包括经过车速循环校验算法处理得到的车辆车速;
26、所述根据所述驾驶模式循环校验输出和所述车速信息循环校验输出进行变传动比决策计算,得到决策后的变传动比,包括:
27、将所述驾驶模式、所述车辆车速和所述方向盘转角作为变量,并分别输入到变传动比决策算法进行计算,所述变传动比决策算法用于以所述变量作为输入并进行变传动比综合控制输出,以得到不同的变传动比。
28、根据本发明的一些实施例,所述状态信息包括车辆总线信息、冗余通信总线信息和板间通信状态,所述将所述状态信息输入到冗余校验控制算法进行冗余处理,得到冗余控制信息,包括:
29、当所述车辆总线信息的信号内容和总线状态的有效性均正常,则直接输出所述车辆总线信息和车辆状态;
30、当所述车辆总线信息的信号内容和总线状态的其中一项存在异常,判断所述板间通信状态的有效性是否正常;
31、当所述板间通信状态的有效性正常,且所述冗余通信总线信息的信号内容和总线状态的有效性均正常,则输出所述冗余通信总线信息和车辆状态。
32、根据本发明的一些实施例,所述将所述状态信息输入到冗余校验控制算法进行冗余处理,得到冗余控制信息,还包括:
33、当所述板间通信状态的有效性正常,且所述冗余通信总线信息的信号内容和总线状态的其中一项存在异常,则输出总线和车辆故障状态;
34、当所述板间通信状态的有效性存在异常,输出总线和车辆故障状态。
35、根据本发明实施例第二方面的线控转向控制系统,包括:
36、车辆状态观测模块,用于获取车辆的状态信息,并将所述状态信息发送至冗余校验控制模块;
37、冗余校验控制模块,用于接收所述状态信息,并将所述状态信息输入到冗余校验控制算法进行冗余处理,得到冗余控制信息;
38、循环控制算法模块,用于根据所述冗余控制信息进行输出处理,得到驾驶模式循环校验输出和车速信息循环校验输出;
39、综合决策控制算法模块,用于根据所述驾驶模式循环校验输出和所述车速信息循环校验输出进行变传动比决策计算,得到决策后的变传动比;并利用决策后的所述变传动比对线控转向系统进行变传动比控制。
40、根据本发明实施例的线控转向控制系统,至少具有如下有益效果:
41、将车辆状态观测模块获取的车辆的状态信息输入到冗余校验控制模块,利用冗余校验控制算法对状态信息进行冗余处理,从而提供高安全的冗余控制信息,以提高安全性;并通过循环控制算法模块对冗余控制信息进行输出处理,以得到驾驶模式循环校验输出和车速信息循环校验输出,然后利用综合决策控制算法模块将经过校验输出的内容进行变传动比决策计算,将决策后的变传动比作为对外输出进行变传动比控制,实现线控转向的变传动比功能,通过设计提升车辆稳定性的线控转向变传动比控制策略,解决了线控转向控制系统在不同驾驶模式切换、不同车速变化情况下由于变传动比输出引发的车辆稳定性问题,避免潜在的车辆失稳风险,提高用户驾乘体验。
42、根据本发明的一些实施例,所述状态信息包括驾驶模式、驾驶模式切换请求和方向盘转角,所述循环控制算法模块包括驾驶模式循环控制算法模块,所述驾驶模式循环控制算法模块用于:
43、根据所述驾驶模式确定所述车辆的当前驾驶模式;
44、当接收到所述驾驶模式切换请求,利用驾驶模式循环校验算法判断当前的所述方向盘转角是否在第一预设范围;
45、当所述方向盘转角在所述第一预设范围内,执行切换所述车辆的驾驶模式;
46、当所述方向盘转角超出所述第一预设范围,维持所述车辆的当前驾驶模式。
47、根据本发明的一些实施例,所述状态信息包括车辆车速和方向盘转角,所述循环控制算法模块包括车速循环控制算法模块,所述车速循环控制算法模块用于:
48、获取当前的所述车辆车速;
49、当接收到所述车辆车速的控制命令,利用车速循环校验算法判断当前的所述方向盘转角是否在第二预设范围;
50、当所述方向盘转角在所述第二预设范围内,执行更新所述车辆车速;
51、当所述方向盘转角超出所述第二预设范围,维持当前的所述车辆车速。
52、根据本发明的一些实施例,所述车速循环控制算法模块还用于:
53、获取更新后的所述车辆车速和上一时刻的所述车辆车速,并进行对比;
54、当更新后的所述车辆车速与上一时刻的所述车辆车速之间的车速差在第三预设范围内,继续执行更新所述车辆车速;
55、当更新后的所述车辆车速与上一时刻的所述车辆车速之间的车速差超出所述第三预设范围,根据车速跟随算法对当前的所述车辆车速进行控制,以控制所述车辆车速的变化幅度。
56、根据本发明的一些实施例,所述状态信息包括方向盘转角,所述驾驶模式循环校验输出包括经过驾驶模式循环校验算法处理得到的驾驶模式,所述车速信息循环校验输出包括经过车速循环校验算法处理得到的车辆车速;
57、所述综合决策控制算法模块还用于:
58、将所述驾驶模式、所述车辆车速和所述方向盘转角作为变量,并分别输入到变传动比决策算法进行计算,所述变传动比决策算法用于以所述变量作为输入并进行变传动比综合控制输出,以得到不同的变传动比。
59、根据本发明实施例第三方面的车辆控制器,包括至少一个处理器;以及存储器,其存储有指令,当通过至少一个处理器来执行该指令时,执行上述实施例第一方面所述的线控转向变传动比控制方法。
60、根据本发明实施例的车辆控制器,至少具有如下有益效果:
61、车辆控制器执行上述实施例的线控转向变传动比控制方法,能够实现线控转向的变传动比功能,通过设计提升车辆稳定性的线控转向变传动比控制策略,解决了线控转向控制系统在不同驾驶模式切换、不同车速变化情况下由于变传动比输出引发的车辆稳定性问题,避免潜在的车辆失稳风险,提高用户驾乘体验。
62、根据本发明实施例第四方面的车辆,包括上述实施例第二方面所述的线控转向控制系统,或上述实施例第三方面所述的车辆控制器。
63、由于车辆采用了上述实施例的线控转向控制系统或车辆控制器的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再赘述。
64、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229723.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。