一种可重构定义的线控转向路感模拟方法和系统
- 国知局
- 2024-08-01 08:17:59
本发明涉及汽车控制,尤其是涉及一种可重构定义的线控转向路感模拟方法和系统。
背景技术:
1、随着汽车技术的迅猛发展,线控转向技术作为驾驶操控领域的一项先进技术逐渐崭露头角,并且越来越受到车企和众多消费者的关注。与传统的机械转向系统相比,线控转向系统取消了转向盘与转向车轮之间的机械连接,引入了电子控制单元和路感电机,从而无需通过机械连接装置,由电信号实现指令传递从而操纵汽车的转向。其灵活的控制方式和快速精确的响应特性,高度符合现代汽车电动化、智能化的发展需求。
2、如图1所示,线控转向系统由转向盘模块、转向执行模块和主控制器模块三个主要部分组成。转向盘模块包括转向盘、转向盘转角传感器、力矩传感器和转向盘力感模拟电机。转向盘模块的主要功能是将驾驶员的转向意图(转向盘转角)转换成数字信号,并传递给线控转向控制器;同时接受主控制器传递来的力矩信号,产生转向盘回正力矩,以提供给驾驶员相应的路感信息。转向执行模块包括前轮转角传感器、转向执行电机、转向电机控制器和前轮转向组件等。转向执行模块的功能是接受主控制器的命令,通过转向电机控制器控制转向车轮转动,以实现驾驶员的转向意图。主控制器对采集的信号进行分析处理,识别车辆的运动状态,向路感电机和转向电机发送指令,控制两个电机的工作,保证各种工况下都具有理想的车辆响应。
3、在线控转向系统中,转向盘与转向车轮之间没有传统的转向传动轴,驾驶员的转向意图由转向盘模块中的转角和力矩传感器获得,通过控制转向电机驱动车轮实现车辆的转向操作;路面信息则通过转向执行模块中的位置和力传感器获得,通过控制路感模拟电机实现对驾驶员的力反馈,同时转向控制器也将车辆行驶状态信息转换成转向盘的回正力矩信息,传递给转向盘模块中的路感电机,以提供驾驶员相应的路感。
4、路感模拟技术是线控转向中不可或缺的部分,它是驾驶员感受路面状态和车辆运动状态的重要媒介,承担着反馈车辆行驶状况的任务。随着科技的不断进步,传统机械转向系统逐渐显露出无法满足消费者对操控体验不断提升的需求的局限性。在这一时代背景下,电子化和智能化成为汽车行业的两大关键趋势,在电子化和智能化的趋势下,车辆系统不仅变得更加先进,而且智能驾驶辅助系统的普及也为车辆的操控性能提出了更高要求。驾驶者不仅期望车辆能够更好地响应操控指令,还希望能够获得更为真实的路感反馈。在这种背景下,线控转向路感模拟技术成为了一个关键的创新方向,其旨在为驾驶者提供更加智能、灵敏和个性化的转向感受。
5、路感模拟这一技术的发展对于驾驶员体验的提升有着显著的影响。首先,通过电子化的路感模拟,驾驶员可以更为准确地感知到车辆在路面上的运动状态,从而更好地掌握车辆的操控。其次,线控转向路感重构技术为驾驶员提供了更为个性化的操控体验。驾驶员可以根据自己的喜好和习惯,通过系统设置调整路感的强度、灵敏度等参数,使得驾驶体验更贴合个体需求。这种个性化体验不仅提高了驾驶的乐趣,也增加了驾驶员对车辆的掌控感。这一技术的崛起也紧密关联着可持续发展的目标。采用线控转向路感模拟技术通常意味着减轻传统机械转向系统的重量和复杂性,有助于实现汽车的轻量化设计。在当前汽车行业对于可持续发展和环保的重视下,轻量化设计成为了制造商们追求的方向之一。因此,路感模拟技术的发展既顺应了电动汽车兴起的趋势,也契合了整个汽车行业对于可持续发展的共同追求。
6、综上所述,线控转向路感模拟技术的崛起是对传统机械转向系统的一次创新性挑战,同时也是汽车行业在电子化、智能化和可持续发展方向上的积极响应。这一技术的发展不仅提高了驾驶员的操控体验,也推动了整个汽车产业链的升级和创新。在未来,随着智能驾驶和电动汽车的不断发展,路感模拟技术有望成为驾驶体验提升的关键技术之一,为驾驶者创造更为智能、安全和舒适的驾驶环境。
7、公开号为cn117068259a的发明公开了一种路感模拟系统及控制方法,路感模拟系统包括相连的方向盘、转向柱管、路感电机、路感电机控制器和底盘域控制器;转动方向盘,路感电机将方向盘信号传给路感电机控制器;路感电机控制器对方向盘信号处理,并传给底盘域控制器;底盘域控制器计算路感反馈力矩,并传给路感电机控制器;控制路感电机产生路感反馈力矩,使驾驶员感知路面状况和车辆状态。提供了一种基于路感模拟系统的控制方法,包括路感电机控制器将方向盘信号处理,并传给底盘域控制器;底盘域控制器计算路感反馈力矩,并反馈给路感电机控制器,使路感电机产生路感反馈力矩,使驾驶员感知。这一路感模拟系统能获得反映路面状况和车辆行驶状态的反馈力矩,并使驾驶员感知。
8、公开号为cn113799872a的发明公开了一种基于线控转向路感模拟的控制方法及系统,属于汽车转向技术领域,路感电机控制器通过can总线接收方向盘转角传感器的转角信号和方向盘力矩传感器的力矩信号,确定驾驶方向和驾驶角度,并做出相应控制;路感电机控制器基于eps电机输出力矩,通过方向盘转角和车速得到的阻尼补偿力矩、回正补偿力矩、摩擦补偿力矩和软止点补偿力矩,通过路感电机控制器上的补偿力矩,通过路面激励、车身姿态和路面情况确定的路面模拟补偿力矩,得到车辆在行驶过程中的实时的路感模拟,将总力矩请求输出给路感电机,由路感电机输出对应的转速。这一路感模拟系统通过多模块模拟路感,实现和传统汽车电动助力转向相同的驾驶手感。
9、公开号为cn113306624a的发明公开了一种基于路感力矩反馈模型的线控转向系统路感调节方法,包括以下步骤:1)构建线控转向系统的路感反馈模型;2)根据路感反馈模型进行路感反馈客观评价;3)根据评价结果设定调节标准进行路感调节。与现有技术相比,这一发明具有考虑全面、路感调节灵活、易于操作等优点。
10、公开号为cn114954640a的发明公开了一种用于线控转向系统的路感模拟装置及其控制方法,装置包括顺次连接的转向管柱、力矩及角度传感器、减速机、以及电机及控制器;所述方法包括:基于齿轮齿条模型、车辆模型计算齿条力的两个分量;对两个分量进行加权计算得到估计齿条力;将估计齿条力与车辆行驶状态相结合计算出基础路感反馈;在基础路感反馈中加入补偿值,得到转向管柱的扭矩参考值;控制器将扭矩参考值,以及齿条末端保护扭矩、扰动估计扭矩进行求和计算,得到路感电机的目标扭矩;控制器控制路感电机输出目标扭矩,以实现车辆在行驶过程中的实时路感模拟。在使用线控转向系统时,这一路感模拟系统可以使驾驶员保持对车辆的路感,保证车辆的操控性及极端状况下的安全性。
11、现有的路感模拟技术在多个方面存在缺陷,具体如下:
12、首先,在低速的行驶场景下,现有技术难以提供合适的路感反馈,某些技术轻便性不足,导致驾驶员驾驶疲劳;某些技术轻便性过足,容易造成安全事故。不合适的路感反馈会降低驾驶的舒适性和操控性。
13、在高速行驶时,现有技术无法实现中心区路感明显、大角度区路感相对缓和的特性,导致在高速下路感的表现不够差异化,使驾驶者难以准确地感知车辆的行驶状态。此外,还存在高速路感不清晰的问题,使得驾驶者难以感知路面状况的变化。
14、在路感灵活性方面,现有技术缺乏足够的可调性,不能通过参数调节进行路感可重构的定义,限制了驾驶员根据个体偏好或不同驾驶条件对转向路感进行个性化调整的能力。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种低速路感轻便,高速路感清晰的可重构定义的线控转向路感模拟方法和系统。
2、本发明的目的可以通过以下技术方案来实现:
3、一种可重构定义的线控转向路感模拟方法,包括以下步骤:
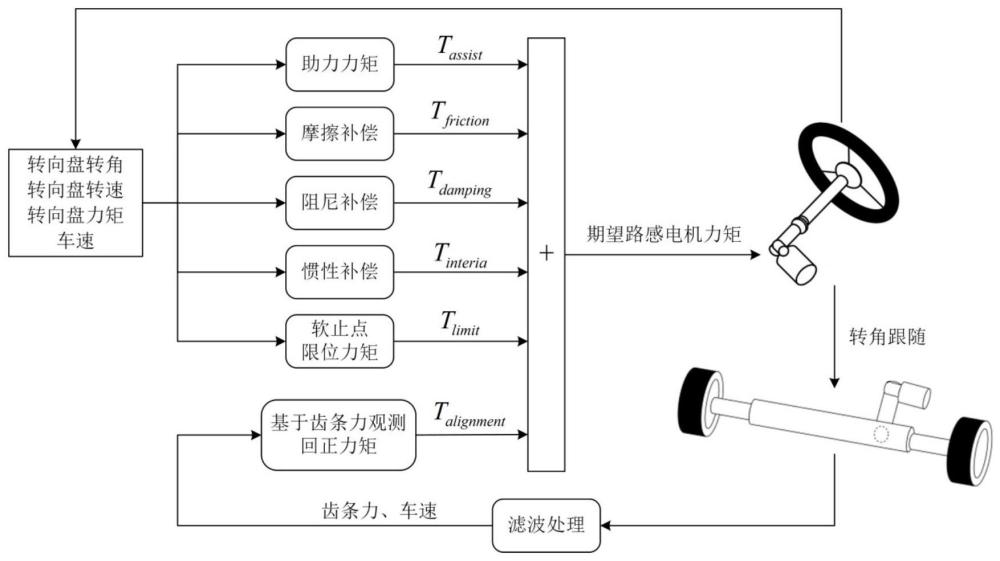
4、构建路感反馈模拟模型,该路感反馈模拟模型包括基于齿条力观测的回正力矩模块、助力力矩模块、摩擦补偿力矩模块、阻尼补偿力矩模块、惯性补偿力矩模块和软止点限位力矩模块,分别用于计算基于齿条力观测的回正力矩、助力力矩、摩擦补偿力矩、阻尼补偿力矩、惯性补偿力矩和软止点限位力矩,并整体相加得到总的期望路感电机力矩;
5、将转向盘转角、转速、力矩、观测齿条力以及车速信号输入所述路感反馈模拟模型中,获取总的期望路感电机力矩,并传输到路感电机,通过路感电机输出此路感反馈力矩至转向盘;
6、通过调整所述路感反馈模拟模型内各个模块的可调节参数,以适应不同的转向盘硬件特性和路感需求。
7、进一步地,所述基于齿条力观测的回正力矩模块对低速和中高速下的回正力矩进行分段设计,并采用双曲正切函数曲线型设计中高速下的回正力矩;
8、所述助力力矩模块基于指数函数曲线型设计助力力矩;
9、所述摩擦补偿力矩模块分别进行动摩擦补偿力矩的设计和静摩擦补偿力矩的设计;
10、所述阻尼补偿力矩模块分别进行转向盘转速有关的阻尼补偿力矩设计和回正过程中的阻尼补偿力矩设计,并采用反正切函数和指数型函数分段组成转向盘转速有关的阻尼补偿力矩;
11、所述惯性补偿力矩模块采用转向盘力矩微分法设计惯性补偿力矩;
12、所述软止点限位力矩模块采用指数函数设计软止点限位力矩。
13、进一步地,所述基于齿条力观测的回正力矩模块的计算表达式为:
14、当车速v小于v0时,
15、talignment=ka_low(v)·g·frack·r
16、式中,talignment为基于齿条力观测的回正力矩,ka_low(v)为回正力矩随车速的增益调节系数,g为回正力矩增益系数,frack为齿条力观测器得到的齿条力,r为将齿条力转化为回正力矩的小齿轮等效半径,v0为低速阈值;其中,参数ka_low(v)和g为可调节参数,以达到低速路感可重构定义的目的;
17、当车速v大于v0时,
18、talignment=kstate·ka_high(v)·g·tanh(ki(v)·frack·r)
19、式中,ka_high(v)为回正力矩随车速的增益调节系数,ki(v)为回正力矩与转向盘转角的梯度随车速的调节系数,kstate为转向盘回正过程中的回正力矩调节系数,g为回正力矩增益系数,frack为齿条力观测器得到的齿条力,r为齿条力转化为回正力矩的小齿轮等效半径;其中,参数ka_low(v),ki(v),kstate,g为可调节参数,以达到中高速路感可重构定义的目的;
20、所述基于齿条力观测的回正力矩模块的可调节参数的调整规律包括:
21、增大参数ka_low(v)会增大对应车速下的回正力矩,使低速下路感相对变沉重;
22、增大参数ka_high(v)会增大对应车速下的回正力矩,使中高速下路感相对变沉重;
23、增大参数ki(v)会使得中高速转向盘力矩达到饱和时的转向盘转角的临界角度变小;
24、减小参数kstate会减小回正过程中的回正力矩。
25、进一步地,所述助力力矩模块的计算表达式为:
26、
27、式中,tassist为助力力矩,th为由转向盘力矩传感器得到的转向盘力矩,ga为助力增益系数,ka为助力曲线上升系数;其中参数ga和ka为可调节参数;
28、所述助力力矩模块的可调节参数的调整规律包括:
29、增大参数ga会增大助力力矩;
30、增大参数ka会增大助力力矩关于转向盘力矩的梯度,从而增大助力力矩。
31、进一步地,所述摩擦补偿力矩模块的计算表达式为:
32、tfriction=tdynamic+tstatic1+tstatic2
33、
34、式中,tfriction为摩擦补偿力矩,tdynamic为动摩擦补偿力矩,为转向盘转速,由转向盘转角传感器检测到的转向盘转角微分后得到,fright,fleft分别为向右转动转向盘和向左转动转向盘的摩擦补偿力矩大小,af为曲线上升系数;其中,fright,fleft,af为可调节参数;
35、
36、
37、式中,tstatic1和tstatic2均为静摩擦补偿力矩,θsw为转向盘转角,th为转向盘力矩,fstatic为补偿的静摩擦大小,θpre为转向盘上一次开始转动时的角度值,bf,cf,df为静摩擦补偿的相关调节系数;其中,fstatic,bf,cf,df为可调节参数;
38、所述摩擦补偿力矩模块的可调节参数的调整规律包括:
39、增大参数fright会使得向右转动转向盘的摩擦阻力变小;
40、增大参数fleft会使得向左转动转向盘的摩擦阻力变小;
41、增大参数af会使得动摩擦补偿力矩达到饱和时的对应转速变小;
42、增大参数fstatic会使得驾驶员感受到的静摩擦力变小;
43、增大参数bf或cf会使转向盘开始转动前的静摩擦补偿变大;
44、增大参数df会使转向盘刚开始转动时的静摩擦补偿变小。
45、进一步地,所述阻尼补偿力矩模块分为中高速下的阻尼补偿和回正过程中的阻尼补偿,对应的计算表达式为:
46、tdamping=tdamping1+tdamping2
47、
48、
49、式中,tdamping为阻尼补偿力矩,tdamping1为中高速下的阻尼补偿力矩,tdamping2为回正过程中的阻尼补偿,车速v大于v0时为中高速,v0为低速阈值;为转向盘转速,b(v)为阻尼补偿力矩随车速的调节系数,vd1为开始施加阻尼补偿的临界车速,vd2为中高速分界车速,此车速后阻尼补偿随车速的增长而快速增长,ad1,ad2,ad3,ad4,ad5为阻尼补偿力矩的相关调节参数;其中,vd1,vd2,ad1,ad2,ad3,ad4,ad5均为可调节参数;
50、
51、式中,θsw为转向盘转角,为转向盘转速,θ0为开始施加回正过程阻尼补偿的临界角度,为开始施加回正过程阻尼补偿的临界转速,ad6,ad7为回正过程阻尼补偿力矩的相关调节参数;其中,θ0,ad6,ad7均为可调节参数;
52、所述阻尼补偿力矩模块的可调节参数的调整规律包括:
53、增大参数vd1会增大开始施加阻尼补偿的临界车速值;
54、增大参数vd2会增大阻尼补偿随车速的更快增长的临界车速值;
55、增大参数ad1或ad4会增大增大阻尼补偿力矩
56、增大参数ad2会在中速范围内,阻尼补偿力矩随车速的增长梯度更大;
57、增大参数ad5会在高速范围内,阻尼补偿力矩随车速的增长梯度更大;
58、增大参数ad3会使阻尼补偿力矩随转向盘转速的增长梯度更大;
59、增大参数θ0,会分别增大开始施加回正过程阻尼补偿的临界角度和临界转速,以达到防止回正过程转向盘回正转速过快的效果,同时不影响驾驶员对转向盘的正常转动
60、增大参数ad6或ad7会使回正过程中的阻尼变大,进一步限制转向盘的转速。
61、进一步地,所述惯性补偿力矩模块的表达式为:
62、
63、式中,tinertia为惯性补偿力矩,为转向盘力矩的微分,ginertia为惯性补偿力矩的增益系数,其中,ginertia为可调节参数;
64、所述惯性补偿力矩模块的可调节参数的调整规律包括:
65、增大参数ginertia会增大惯性补偿力矩。
66、进一步地,所述软止点限位力矩模块的计算表达式为:
67、
68、式中,tlimit为软止点限位力矩,θsw为转向盘角度传感器检测到的转向盘转角,θlimit为限位角度,klimit为限位力矩增益系数,alimit为限位力矩上升系数;其中,θlimit,klimit为可调节参数;
69、所述软止点限位力矩模块的可调节参数的调整规律包括:
70、增大参数θlimit会增大转向盘的最大可转动角度;
71、增大参数klimit会使转向盘超出限位角后,限位力矩增长更快;
72、增大参数alimit会使当转向盘转角超出限位值后限位力矩增长更快。
73、进一步地,所述方法还包括构建多个路感的客观评价指标,基于各个路感的客观评价指标,调整所述路感反馈模拟模型内各个模块的可调节参数;
74、所述客观评价指标包括:
75、转向角滞后指标,定义为在转向盘力矩为零时的剩余转向盘角度,描述了转向盘角度相对于转向盘力矩的滞后性;
76、转向摩擦指标,定义为在转向盘角度为零时的剩余转向盘力矩值,描述了转向系统的摩擦水平;
77、转向力矩刚度指标,定义为在转向盘角度为零时的转向盘力矩梯度,描述了在高速行驶时驾驶员对转向盘中心位置的感觉;
78、转向回正性指标,定义为在转向盘力矩为零时的车辆剩余侧向加速度,直接反映了车辆转向系统的回正性能;
79、转向中心力指标,定义为在车辆侧向加速度为零时的转向盘力矩大小,描述了转向系统的干摩擦;
80、转向中心感觉指标,定义为在车辆侧向加速度为零时的转向盘力矩梯度,直接反映了车辆的操控特性;
81、转向非线性力指标,定义为在车辆侧向加速度为0.1g时的转向盘力矩大小,描述了转向盘非线性力的大小;
82、转向线性度指标,定义为在车辆侧向加速度为0.1g时的转向盘力矩梯度与转向中心感觉的比值,描述了转向盘偏离中心区域时的转向感觉变化程度;
83、转向盘最大作用力矩指标,定义为中低速下转向盘力矩的最大值,描述了中低速下驾驶员大角度转向时的转向感觉;
84、转向盘平均力矩指标,定义为中低速下正弦转向时的转向盘力矩平均值,描述了中低速下的转向盘力矩水平。
85、本发明还提供一种可重构定义的线控转向路感模拟系统,包括存储器和处理器,所述存储器存储有计算机程序,处理器调用所述计算机程序执行如上所述的方法的步骤。
86、与现有技术相比,本发明具有以下优点:
87、(1)本发明通过设计线控转向路感模拟方法,实现了车辆在低中高各种车速下良好的转向盘路感反馈,低速下转向轻便且舒适,高速下转向路感清晰准确,且具有明显的转向盘中心区路感;本发明的路感模拟方法加入了可重构定义的特性,对基于齿条力观测的回正力矩、助力力矩、摩擦补偿力矩、阻尼补偿力矩、惯性补偿力矩和软止点限位力矩的计算均设置对应的可调节参数,可以自由设计这些参数以适应不同的转向盘硬件特性和路感需求,充分发挥了线控转向系统的灵活性优势,且考虑到驾驶员驾驶风格的不同,可以进行个性化的转向盘手感定制,以满足多样的驾驶需求。
88、(2)本发明设置的可调节参数充分考虑了各车速下的路感反馈特性,以满足路感低速轻便和高速清晰准确的要求,能够实现低速行驶时转向路感轻便,驾驶员大角度转向轻松舒适,高速行驶时转向路感清晰准确,具有明显的转向盘中心区路感,转向盘在大角度区能够提醒驾驶员感受到轮胎的附着状态,以防止危险的大角度转向行为等效果。
89、(3)本发明定义了路感的相关客观性评价指标,指出了路感模型中各参数对路感评价指标的具体影响,便于进行各项可调节参数的调整。
本文地址:https://www.jishuxx.com/zhuanli/20240722/231069.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表