基于ASILD等级的EPS控制器内部主芯片隔离电路及控制方法与流程
- 国知局
- 2024-08-01 08:18:35
本发明涉及转向系统,具体的说是一种基于asil d等级的eps控制器内部主芯片隔离电路及控制方法。
背景技术:
1、电动助力转向系统具有体积小、重量轻、结构简单、效率高、节能环保、控制方法灵活等优点,已经成为了汽车不可缺少的一部分。电动助力转向系统控制器电路设计及其控制方法是电助力转向系统的核心,国内外的电动助力转向系统或者控制器的供应商都有自己的控制器电路设计和控制方法,主要实现的核心功能就是助力电机的控制和转向系统功能安全设计。
2、现有的电动助力转向控制系统(eps)由转角转矩传感器、车速传感器、控制单元处理器(包含电源,mcu,预驱,功率模块等)、助力电机等组成。其基本工作原理是:转角转矩传感器测得的方向盘转矩信号和车速信号一同送给控制单元mcu处理器,经主芯片处理器处理和计算以决定助力电机的转向和助力电流的大小,从而完成转向助力控制。但现有的电动助力转向控制系统是基于驾驶员转向提高助力进行设计,其功能安全等级只能达到asil-b,假如其中的每一个节点处于异常,整个电动助力转向控制系统将失效,将会给安全驾驶带来严重的后果,所以无法满足自动驾驶的功能安全要求。针对于此提出了冗余系统控制方法,达到asil-d的产品,在冗余系统中由于两边存在着干扰,所以为了增强抗干扰性,在两边进行了隔离方案,以达到避免相互之间串扰的存在。
技术实现思路
1、本发明为克服现有技术的不足,提供一种基于asil d等级的eps控制器内部主芯片隔离电路及控制方法,使冗余系统的电动助力转向系统功能安全等级提高;助力电机的控制性能更加稳定;控制器保护和诊断机制更加全面,使得控制器更加安全可靠,不易损坏的目的。
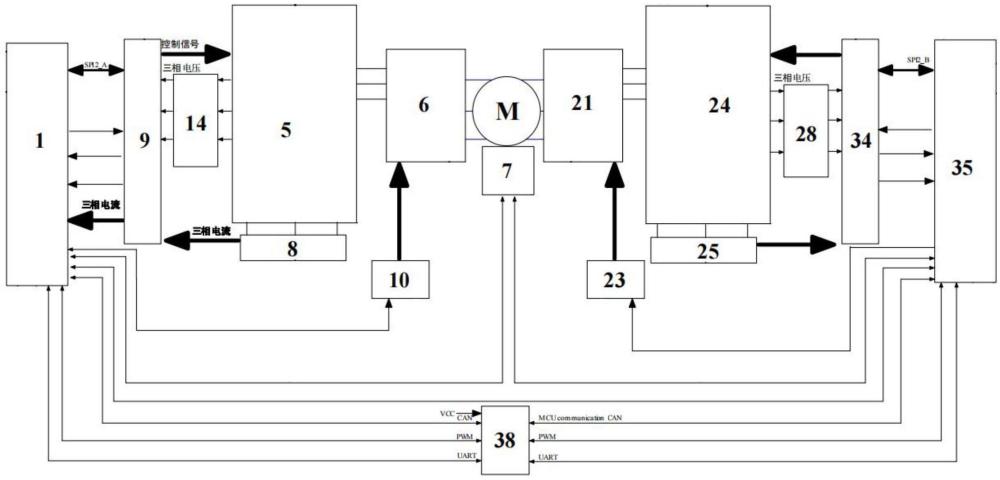
2、为实现上述目的,设计一种基于asil d等级的eps控制器内部主芯片隔离电路,包括微控制器、冗余微控制器、通信隔离模块、六相桥驱动芯片、冗余六相桥驱动芯片、六相桥模块、冗余六相桥模块、六相分离模块、冗余六相分离模块、六相相电流采样电路模块、冗余六相相电流采样电路模块、六相分离电路驱动芯片、冗余六相分离电路驱动芯片、电机转角位置传感器,其特征在于:微控制器与冗余微控制器之间连接通信隔离模块,微控制器与冗余微控制器的控制信号输出口分别与六相分离电路驱动芯片与冗余六相分离电路驱动芯片的信号输入口相连,六相分离电路驱动芯片与冗余六相分离电路驱动芯片的信号输出口与六相分离模块与冗余六相分离模块的控制信号接收口相连;六相分离模块与冗余六相分离模块的信号输出口与永磁同步电机的信号输入端口相连,永磁同步电机的信号输出端口与电机转角位置传感器相连;所述的六相分离模块与冗余六相分离模块的信号输入口分别与六相桥模块与冗余六相桥模块的信号输出端口相连,六相桥模块与冗余六相桥模块的电源输入口分别与六相相电流采样电路模块与冗余六相相电流采样电路模块的电源输入口、六相桥驱动芯片与冗余六相桥驱动芯片的电源输入口相连;所述六相相电流采样电路模块与冗余六相相电流采样电路模块还与六相桥驱动芯片与冗余六相桥驱动芯片的六相电流信号输入口相连接。
3、所述的六相分离模块与冗余六相分离模块相同,六相分离模块内包括电机续流电路,所述的电机续流电路为:vbat端口分为三路,分别与场效应管一的漏电极、场效应管二的漏电极、场效应管二的漏电极相连,场效应管一的源极分为两路,分别与场效应管四的漏电极、场效应管七的漏电极相连,场效应管七的源极与六相电机的u相相连,场效应管二的源极分为两路,分别与场效应管八的漏电极、场效应管五的漏电极相连,场效应管八的源极与六相电机的v相相连,场效应管三的源极分为两路,分别与场效应管六的漏电极、场效应管九的漏电极相连,场效应管九的源极与六相电机的w相相连,场效应管四的源极、场效应管五的源极、场效应管六的源极汇总后接地;所述场效应管一~场效应管六的门极汇总后与六相桥驱动芯片相连。
4、所述的六相桥模块与冗余六相桥模块、六相桥驱动芯片与冗余六相桥驱动芯片、微控制器与冗余微控制器之间通过六相电机相电压状态反馈电路与冗余六相电机相电压状态反馈电路连接。
5、所述的六相电机相电压状态反馈电路与冗余六相电机相电压状态反馈电路相同,六相电机相电压状态反馈电路为:电机续流电路中的场效应管一的源极分别与电阻一和电阻二的一端连接,电阻一的另一端与vbat相连,电阻二的另一端分别电阻三的一端、电容一的一端、微控制器的ad1端口相连,电阻三及电容一的另一端合并接地;场效应管二的源极分别与电阻四和电阻五的一端连接,电阻四的另一端与vbat相连,电阻五的另一端分别电阻六的一端、电容二的一端、微控制器的ad2端口相连,电阻六及电容二的另一端合并接地;场效应管三的源极分别与电阻七和电阻八的一端连接,电阻七的另一端与vbat相连,电阻八的另一端分别电阻九的一端、电容三的一端、微控制器的ad3端口相连,电阻九及电容三的另一端合并接地。
6、所述的vbat为电池两端的电压。
7、所述的微控制器与冗余微控制器的型号为sak-tc234lp-32f200n ac。
8、所述的隔离模块包括隔离芯片,所述的隔离芯片的型号为iso7763-q1,隔离芯片一边的vcc1端口分别连接5v电压及电容四的一端,电容四的另一端接地,隔离芯片的ina、inb、inc、outd、oute、outf端口的两边分别与微控制器及冗余微控制器连接,隔离芯片的gnd1端口接地;隔离芯片另一边的vcc1端口分别连接5v电压及电容五的一端,电容五的另一端接地。
9、一种基于asil d等级的eps控制器内部主芯片隔离电路的控制方法,所述的控制方法的具体流程如下:
10、s1、在微控制器和冗余微控制器中预先设置助力曲线或者助力模型;
11、s2、微控制器和冗余微控制器采集汽车点火信号、车速信号、方向盘扭矩信号、方向盘转角信号;
12、s3、以助力曲线或助力模型为基础,根据步骤s2采集到的相关数据,获得电流信号给定、转速信号给定;
13、s4、六相相电流采样电路模块和冗余六相相电流采样电路模块对六相电流进行高精度采样,得到电机实际六相电流信号,并将该信号传递到微控制器和冗余微控制器;与此同步进行的是:电机转角位置传感器将同步采集到的电机实际转速信号同步传递到微控制器和冗余微控制器;
14、s5、微控制器和冗余微控制器同步将电机实际六相电流信号、电机实际转速信号和与其对应的电流信号给定、转速信号给定分别传递到微控制器和冗余微控制器内部的电机电流闭环控制器和电机转速闭环控制器,进行闭环控制处理,从而得到电流控制信号和转速控制信号;
15、s6、将电流控制信号和转速控制信号传递到微控制器和冗余微控制器内的pwm调制器中,产生六相桥控制信号;
16、s7、将六相桥控制信号传递到六相桥驱动芯片和冗余六相桥驱动芯片中,以六相桥模块和冗余六相桥模块中12个场效应管一~场效应管六的开启/闭合,从而控制电机产生相应的电机助力。
17、所述的控制方法还包括六相桥上电故障诊断,以u相上下桥场效应管一、场效应管四的工作状态诊断为例,具体诊断流程如下:
18、(1)微控制器发出控制指令使u相上下桥场效应管一、场效应管四同时关闭,此时的u相反馈电压为vbat经过电阻一、电阻二、电阻三的电阻分压之后输入到微控制器,故此时微控制器测量u相反馈电压的正常值应该为vbat*(r3)/(r1+r2+r3) ;
19、(2)对微控制器测量u相反馈电压进行判断,符合正常值,则进入步骤(5);反之,则说明u相上下桥的场效应管一、场效应管四必然发生了故障,到底是场效应管一还是场效应管四发生了故障,这需要在这种状况下进一步比较测到的相电压;
20、(3)判断微控制器测量u相反馈电压是否等于vbat*(r3)/(r2+r3),是则u相上桥场效应管一发生了短路故障;否则进入步骤(4)继续进行判断;
21、(4)判断微控制器测量u相反馈电压是否等于0,是则u相下桥场效应管四发生了短路故障;否则说明场效应管一和场效应管四都有可能处在一个非预期的状态,此时系统无法正常工作,u相场效应管的诊断工作终止;
22、(5)微控制器发出控制指令使u相上桥场效应管一打开,u相下桥场效应管四关闭,此时vbat直接输入到电机u相上,此时u相反馈电压为vbat经过电阻二、电阻三电阻分压之后输入到冗余微控制器中,故此时微控制器测到的u相反馈电压的正常值应该为vbat*(r3)/(r2+r3);
23、(6)此时对微控制器测量u相反馈电压进行判断,符合正常值,则进入步骤步骤(8);反之,则说明u相上桥场效应管一发生了故障,具体故障需要进行下一步判断;
24、(7)判断微控制器测量u相反馈电压是否等于vbat*(r3)/(r1+r2+r3) ,如果是的话,则说明u相上桥场效应管一发生了断路故障;否则说明u相上桥场效应管一工作不正常;
25、(8)微控制器发出控制指令使u相上桥场效应管一关闭,u相下桥场效应管四打开,此时电机的u相直接接在gnd上,那么微控制器测到的u相反馈电压的正常值应该为0v;
26、(9)判断微控制器测量u相反馈电压是否等于0,是则说明u相上下桥场效应管一、场效应管四工作正常;否则说明u相下桥场效应管四出现故障,具体故障需要进行下一步判断;
27、(10)判断微控制器测量u相反馈电压是否等于vbat*(r3)/(r1+r2+r3),是则u相下桥场效应管四发生了断路故障;否则u相下桥场效应管四工作不正常。
28、本发明同现有技术相比,提供一种基于asil d等级的eps控制器内部主芯片隔离电路及控制方法,使冗余系统的电动助力转向系统功能安全等级提高;助力电机的控制性能更加稳定;控制器保护和诊断机制更加全面,使得控制器更加安全可靠,不易损坏的目的。
本文地址:https://www.jishuxx.com/zhuanli/20240722/231102.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表