起重机制动过程吊具运动姿态和下滑位移量的检测方法及系统与流程
- 国知局
- 2024-08-01 04:55:10
本发明涉及起重机制动过程吊具运动姿态及下滑位移量检测,尤其涉及一种起重机制动过程吊具运动姿态和下滑位移量的检测方法及系统。
背景技术:
1、起重机械被广泛应用于工矿企业、建筑、道路桥梁等工业生产和基础建设领域,制动下滑量是评价起重机安全性能的重要指标,gb6067.1—2010《起重机械安全规程 第 1部分》、tsg 51-2023《起重机械安全技术规程》以及gb/t3811—2008《起重机设计规范》中对起重机制动下滑量进行了技术规范中规定:起吊物品在下降制动时的制动距离,即起升机构的控制器调节到最低档位,使得起升设备以最缓慢的速度保持向下平稳降落运动,操纵控制器至归零档位抱闸制动,当制动器制动到重物完全静止下来的下降距离,应该小于等于1min内起升机构稳定起升距离的 1/65,且吊具偏角应小于3°(吊钩偏角即吊重摆角)。
2、然而,迄今各种类型起重机自身均缺失垂直吊装显示,司机无法判断吊装中提升滑轮组是否处于垂直状态,其要由吊装指挥者,依据监视被吊重物姿态变化者提供的信息指挥司机协同吊装,尤其抬吊是比较危险的作业;同时,海上货运码头风力较大,为了降低风力对做起重机制动下滑量的影响,需要提高起重机吊具下滑量测量检测结果的准确性。
3、换言之,起重机在实际应用中,吊具运动偏角过大会影响起重机定位精度,并对周围人员或物体安全造成影响;并且,制动下滑位移量必须在标注允许范围内,过大会对吊运过程中的工作人员或货物造危险,过小可能产生较大的瞬间冲击,对起重机整机结构安全造成损坏。
技术实现思路
1、本发明的目的在于提供一种起重机制动过程吊具运动姿态和下滑位移量的检测方法及系统,其能够提高吊运重物运行及卸装位置的准确性判断,从而有效降低起重机械制动下滑量检测晃动的误差,进而有效提升制动下滑位移量的精确性;并且,能够准确分析起重机制动器的制动性能,以有效提高检验工作效率。
2、为达到上述目的,本发明采用如下技术方案:
3、一种起重机制动过程吊具运动姿态和下滑位移量的检测方法,包括以下步骤:步骤s1、选择需要检验测量吊具运动姿态及制动下滑位移量的起重机械设备;
4、步骤s2、将数据采集模块通过底座磁铁吸附在起重机的吊具上,使得数据采集模块保持水平、且z轴与参考竖直向下方向保持平行,并处于竖直的状态,以及调整方位方向与地球磁场方向保持一致;
5、步骤s3、开启数据采集模块,等待电源指示灯长亮,与手持操作端连接无线网络,配置无线网络参数,并验证无线连接是否连接成功,以进行系统自检功能;
6、步骤s4、把起重机吊具载荷升到合适的高度,再使其下降,当达到匀速下降时刻前,触摸手持操作端的触发按钮发送开始检测采集制动过程的数据,在吊具载荷禁止停稳,触摸手持操作端的触发按钮发送结束指令,并保存数据;
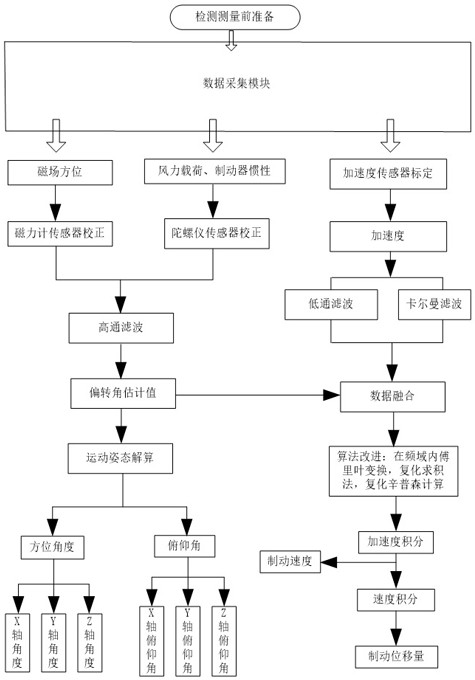
7、步骤s5、使用高通滤波对磁力传感器和陀螺仪传感器的数据进行滤波,得出其对应的偏转角估计值,对吊具载荷的运动姿态解算出方位角和俯仰角;
8、步骤s6、对加速度传感器进行标定,采集到制动过程的加速度数据,经过低通滤波和卡尔曼滤波处理后的数据与偏转角估计值进行融合,以降低因风载荷、制动器惯性和钢丝绳晃动造成的偏转角对制动下滑过程加速度结果的影响;
9、步骤s7、先在频域内对加速度数据进行傅里叶变换,为了避免可能会引起截断误差,引用复化求积方法对加速度数据进行处理;
10、步骤s8、对制动过程的加速度数据进行积分,并积分求解出制动过程的速度,再对制动过程的速度进行积分,求解出吊具载荷制动位移量。
11、其中,数据采集模块对起重机械吊具载荷运动姿态及制动位移量数据进行采集,经过无线方式上传到手持操作端,使用手持操作端上的触发按钮下发开始和结束控制指令,采集的数据在显示模块上进行实时显示并能保存。
12、具体地,把数据采集模块采集吊具载荷的制动下滑加速度、角速度和方位角数据,采用高通滤波、低通滤波和卡尔曼滤波对数据进行处理,使用角速度和方位角数据优化制动下滑位移量的数据。
13、进一步地,将滤波后的磁力计传感器和陀螺仪传感器采集的数据进行滤波,得出姿态的偏转角估计值,经过运动姿态解算,求解其运动的姿态;使用偏转估计值对滤波后的加速度数据进行融合处理,在频域内进行傅里叶变换,复化求积法、复化辛普森计算,经过积分求解制动下滑的速度和位移量。
14、一种起重机制动过程吊具运动姿态和下滑位移量的检测系统,包括:数据采集模块和手持操作端;
15、所述数据采集模块包括:与加速度传感器、陀螺仪传感器和磁力计传感器连接的数据处理模块,且所述数据处理模块连接有信息处理中心,所述信息处理中心连接有无线通讯模块和电源模块;所述手持操作端包括:触发按钮,以及显示模块;
16、传感器组中加速度传感器、陀螺仪传感器和磁力计传感器对起重机制动性能及运动姿态数据信息进行采集,经过数据处理模块输送给信息处理中心进行无线传输通信,然后通过无线通信模块传输给手持操端,并在手持操作端的显示模块上进行信息显示,同时电源模块为整个数据采集模块提供电源;并且,手持操作端具有触发按钮控制开始或停止数据采集指令。
17、更进一步地,所述触发按钮包括:金属外壳,以及设置于所述金属外壳内部的前部触摸面板;所述前部触摸面板连接有触摸单元的触摸面板,且所述触摸面板连接有触摸采集芯片;所述触摸采集芯片连接有通信单元的基带处理模组,且所述基带处理模组连接有天线,所述天线用于通过无线通信的方式与数据采集模块连接;
18、通过触摸单元的触摸面板感应人手的信号,触摸采集芯片进行识别处理,把感应到的控制信号传输给通信单元的基带处理模组,并经过天线分别发送给数据采集模块。
19、相对于现有技术,本发明所述的起重机制动过程吊具运动姿态和下滑位移量的检测方法及系统具有以下优势:
20、本发明提供的起重机制动过程吊具运动姿态和下滑位移量的检测方法及系统,能够实时判断起重机械吊具运动姿态以及起重机械制动下滑位移量进行精确地检测,其对起重机的吊具载荷制动位移量及运动姿态的检测方便可行,能够为起重机械的安全性进行良好地评估,特别为多种形式起重机的作业安全性提供检验结果,从而有效提高现场检验人员的工作效率,并对降本增效起到积极效果,具有很好地实用价值。
技术特征:1.一种起重机制动过程吊具运动姿态和下滑位移量的检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的起重机制动过程吊具运动姿态和下滑位移量的检测方法,其特征在于,数据采集模块对起重机械吊具载荷运动姿态及制动位移量数据进行采集,经过无线方式上传到手持操作端,使用手持操作端上的触发按钮下发开始和结束控制指令,采集的数据在显示模块上进行实时显示并能保存。
3.根据权利要求2所述的起重机制动过程吊具运动姿态和下滑位移量的检测方法,其特征在于,把数据采集模块采集吊具载荷的制动下滑加速度、角速度和方位角数据,采用高通滤波、低通滤波和卡尔曼滤波对数据进行处理,使用角速度和方位角数据优化制动下滑位移量的数据。
4.根据权利要求3所述的起重机制动过程吊具运动姿态和下滑位移量的检测方法,其特征在于,将滤波后的磁力计传感器和陀螺仪传感器采集的数据进行滤波,得出姿态的偏转角估计值,经过运动姿态解算,求解其运动的姿态;使用偏转估计值对滤波后的加速度数据进行融合处理,在频域内进行傅里叶变换,复化求积法、复化辛普森计算,经过积分求解制动下滑的速度和位移量。
5.一种起重机制动过程吊具运动姿态和下滑位移量的检测系统,其特征在于,包括:数据采集模块和手持操作端;
6.根据权利要求5所述的起重机制动过程吊具运动姿态和下滑位移量的检测系统,其特征在于,所述触发按钮包括:金属外壳,以及设置于所述金属外壳内部的前部触摸面板;所述前部触摸面板连接有触摸单元的触摸面板,且所述触摸面板连接有触摸采集芯片;所述触摸采集芯片连接有通信单元的基带处理模组,且所述基带处理模组连接有天线,所述天线用于通过无线通信的方式与数据采集模块连接;
技术总结一种起重机制动过程吊具运动姿态和下滑位移量的检测方法及系统,涉及起重机检测技术领域,其能够提高吊运重物运行及卸装位置的准确性判断。所述起重机制动过程吊具运动姿态和下滑位移量的检测方法,使用高通滤波对磁力传感器和陀螺仪传感器的数据进行滤波,得出其对应的偏转角估计值,对吊具载荷的运动姿态解算出方位角和俯仰角;对加速度传感器进行标定,采集到制动过程的加速度数据,经过低通滤波和卡尔曼滤波处理后的数据与偏转角估计值进行融合;在频域内对加速度数据进行傅里叶变换,引用复化求积方法对加速度数据进行处理;对制动过程的加速度数据进行积分,求解出制动过程的速度,再对制动过程的速度进行积分,求解出吊具载荷制动位移量。技术研发人员:刘德阳,苏宇航,戚政武,杨宁祥,陈建勋,杨明超,李继承,李谦,崔靖昀受保护的技术使用者:广东省特种设备检测研究院珠海检测院技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/217337.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表