一种剪式双举升机器人的制作方法
- 国知局
- 2024-08-05 12:44:12
本技术涉及机械设备,尤其涉及一种剪式双举升机器人。
背景技术:
1、举升机是一种将举升的设备,主要应用于车辆维修和立体车库等领域,随着新能源车的兴起,处合装线体需要用到agv举升机器人外,电池合装线体上也会用到,因电池很重,需要利用举升机后,再对其进行装配。
2、现有的剪式举升机器人不便于移动,且功能性不强,只能对物品进行提升,不能对其进行送料,无法将物品输送至不同高度的其他平台上,需要人工手动上料卸料,没有全自动的安全锁定结构,锁定结构需要人工手动进行锁紧或解锁,操作麻烦。
技术实现思路
1、本实用新型所要解决的技术问题是针对上述现有技术的不足,提供一种剪式双举升机器人,以解决上述背景技术中存在的至少一个技术问题。
2、本实用新型解决上述技术问题的技术方案如下:一种剪式双举升机器人,其包括:
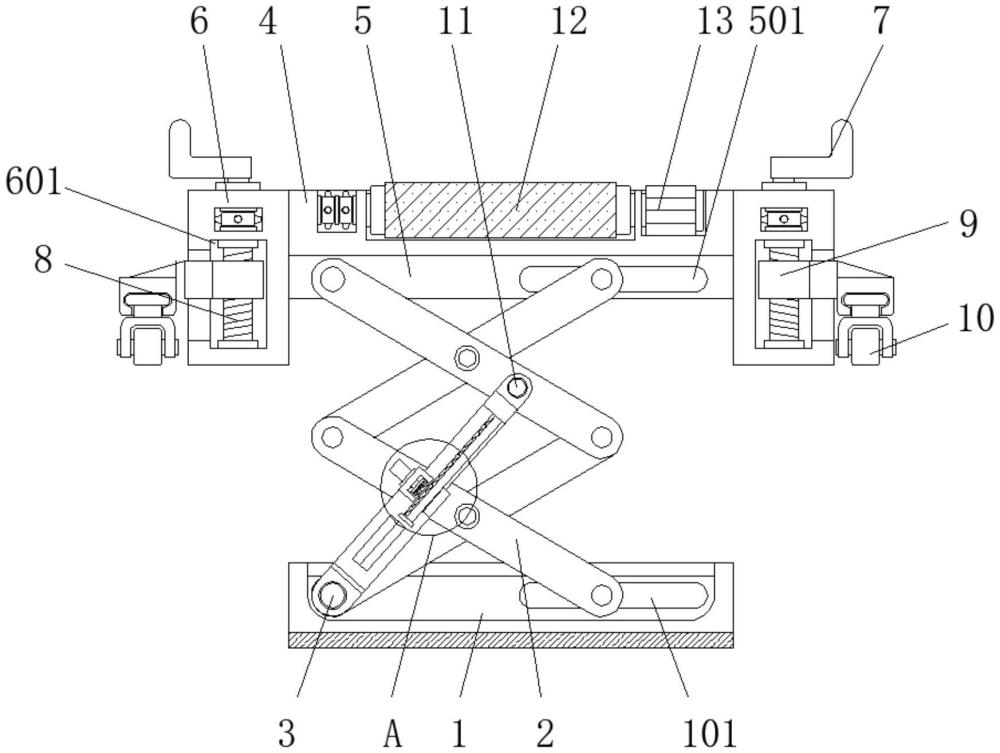
3、底座,所述底座内部的两端均安装有剪式架,且底座内部的一侧固定有安装轴,所述剪式架底部靠近安装轴的一侧均与安装轴相铰接,且剪式架之间的安装轴上对称铰接有液压撑杆,所述剪式架之间远离安装轴的一侧固定有连接杆,且液压撑杆的顶部均与连接杆相铰接;
4、承托座,所述承托座设置于剪式架顶端,且承托座底部的两端均设置有侧板,所述剪式架顶部靠近安装轴的一侧均与侧板相铰接,且剪式架顶部远离安装轴的一侧均与侧板滑动连接,所述剪式架顶部的中间位置处开设有驱动仓,且驱动仓内均匀设置有输送辊;
5、行走座,所述行走座对称固定在承托座的两侧,且行走座的内部均匀开设有驱动仓,所述驱动仓内均设置有丝杆,且丝杆上均套设有与其相适配的丝杆套,所述丝杆套远离承托座的一侧均固定有行走轮,所述行走座顶部的一端均安装有旋转手柄,且旋转手柄的底部均通过转轴与其中一个丝杆连接,同一所述行走座内的丝杆之间均通过链轮机构构成传动连接。
6、优选的,所述底座内部两端远离安装轴的一侧均开设有第一滑轨,且侧板内部远离安装轴的一侧均开设有第二滑轨,所述第一滑轨和第二滑轨内均设置有形状与其相吻合的滚轮,且滚轮均与剪式架连接。
7、优选的,所述承托座的两端均铰接有上坡板,且承托座顶部的四个拐角处均开设有卡槽。
8、优选的,所述承托座顶部一侧的中间位置处安装有驱动电机,且驱动电机的输出端通过转轴与其中一个所述输送辊连接,所述输送辊之间通过链轮机构构成传动连接。
9、优选的,所述液压撑杆之间安装有连接座,且连接座内部的中间位置处开设有限位槽,所述限位槽内贯穿有安全板,且安全板的顶部与连接杆相铰接,所述安全板的靠近安装轴的一侧开设有限位卡槽。
10、优选的,所述连接座靠近安装轴一侧的中间位置处安装有微型液压伸缩杆,且连接座内部靠近微型液压伸缩杆的位置处开设有收纳仓,所述收纳仓内设置有安装板,且微型液压伸缩杆的输出端与安装板连接,所述安装板靠近安全板的一侧通过弹簧安装有形状与限位卡槽相吻合的限位块。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过安装有行走座,其远离承托座的一侧皆均匀设置有可升降的行走轮,再需要对装置进行转移时,剪式架处于压缩状态,转动旋转手柄,通过丝杆传动作用使行走轮下移与地面接触,方便装置的转移;
13、2、本实用新型通过设置有承托座,其顶部均匀设置有输送辊,可同步旋转,对物品进行自动上料卸料,方便将物品输送至不同高度的其他平台上,功能性更强;
14、3、装置通过设置有安全板和限位块,举升至合适位置时,微型液压伸缩杆伸长,使得限位块完全卡入安全板的限位卡槽内,完成自锁,使得装置使用的安全性更高,且无需手动操作,使用更方便。
技术特征:1.一种剪式双举升机器人,其特征在于,其包括:
2.根据权利要求1所述的一种剪式双举升机器人,其特征在于:所述底座(1)内部两端远离所述安装轴(3)的一侧均开设有第一滑轨(101),且所述侧板(5)内部远离所述安装轴(3)的一侧均开设有第二滑轨(501),所述第一滑轨(101)和第二滑轨(501)内均设置有形状与其相吻合的滚轮(18),且所述滚轮(18)均与所述剪式架(2)连接。
3.根据权利要求1所述的一种剪式双举升机器人,其特征在于:所述承托座(4)的两端均铰接有上坡板(14),且所述承托座(4)顶部的四个拐角处均开设有卡槽(402)。
4.根据权利要求1所述的一种剪式双举升机器人,其特征在于:所述承托座(4)顶部一侧的中间位置处安装有驱动电机(13),且所述驱动电机(13)的输出端通过转轴与其中一个所述输送辊(12)连接,所述输送辊(12)之间通过链轮机构构成传动连接。
5.根据权利要求1-4任一项所述的一种剪式双举升机器人,其特征在于:所述液压撑杆(15)之间安装有连接座(16),且所述连接座(16)内部的中间位置处开设有限位槽(1602),所述限位槽(1602)内贯穿有安全板(17),且所述安全板(17)的顶部与所述连接杆(11)相铰接,所述安全板(17)的靠近所述安装轴(3)的一侧开设有限位卡槽(1701)。
6.根据权利要求5所述的一种剪式双举升机器人,其特征在于:所述连接座(16)靠近所述安装轴(3)一侧的中间位置处安装有微型液压伸缩杆(19),且所述连接座(16)内部靠近所述微型液压伸缩杆(19)的位置处开设有收纳仓(1601),所述收纳仓(1601)内设置有安装板(20),且所述微型液压伸缩杆(19)的输出端与所述安装板(20)连接,所述安装板(20)靠近所述安全板(17)的一侧通过弹簧安装有形状与所述限位卡槽(1701)相吻合的限位块(21)。
技术总结本技术涉及一种剪式双举升机器人,其包括:底座,所述底座内部的两端均安装有剪式架,且底座内部的一侧固定有安装轴,所述剪式架底部靠近安装轴的一侧均与安装轴相铰接,且剪式架之间的安装轴上对称铰接有液压撑杆,所述剪式架之间远离安装轴的一侧固定有连接杆,且液压撑杆的顶部均与连接杆相铰接。该剪式双举升机器人,通过安装有行走座,其远离承托座的一侧皆均匀设置有可升降的行走轮,再需要对装置进行转移时,剪式架处于压缩状态,转动旋转手柄,通过丝杆传动作用使行走轮下移与地面接触,方便装置的转移。技术研发人员:何清华,李杰,易智,张登辉,陈圣江,张晗受保护的技术使用者:武汉道禾智能设备有限公司技术研发日:20231221技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/264132.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表