基于形状记忆合金丝的超轻薄柔性致动器
- 国知局
- 2024-07-27 13:30:34
本发明属于电子仪器,尤其是涉及一种超轻薄柔性致动器,可用于软体机械结构设计。
背景技术:
1、柔性致动器是软体机械结构实现驱动控制的核心。形状记忆合金致动器可以用焦耳热即电流直接进行驱动,能产生较大的输出力,具有响应速度快、噪音低的独特优势。
2、授权公告号为cn114888533b的专利文献公开了一种“具备温度自传感功能的形状记忆合金软体驱动器的制备方法”,其基于预拉伸层柔性基底和封装层柔性基底,将形状记忆合金丝和柔性温度传感器封装于预拉伸层柔性基底和封装层柔性基底之间,从而制备致动器。其中预拉伸柔性基底与封装层柔性基底均为弹性体,致动器依靠形状记忆合金实现驱动变形,在之后通过弹性体的回弹使致动器恢复初始状态,从而实现致动器的双向驱动。
3、授权公告号为cn202210943487.1的专利文献公开了一种“快速响应的多模态形状记忆合金软体驱动器”,该致动器组成包括形状记忆合金丝,柔性基底,弹性增强层,散热涂层,所述形状记忆合金丝设置在柔性基底中,所述弹性增强层设置在柔性基底中性面上,所述散热涂层喷涂在形状记忆合金丝表面的柔性致动器。其中柔性基底与弹性增强层均为弹性体,致动器依靠形状记忆合金实现驱动变形,在之后通过弹性体的回弹使致动器恢复初始状态,从而实现致动器的双向驱动。
4、授权公告号为cn111396274a的专利文献公开了一种“基于形状记忆合金的感知驱动一体化薄板驱动器”其包括两块固定板,柔性传感器阵列,硅胶基体,弹性薄片以及形状记忆金属丝的柔性致动器。其中硅胶基体与弹性薄片均为弹性体材料,在工作过程中,致动器依靠形状记忆合金实现驱动变形,在之后通过弹性体的回弹使致动器恢复初始状态,从而实现致动器的双向驱动。
5、上述现有形状记忆合金丝柔性致动器由于需要与弹性体结合,因而存在以下几方面的问题:
6、一是由于引入弹性体本身的体积与柔性性能,导致该类形状记忆合金致动器在小型化、轻薄化、柔性化程度上明显不足,限制了形状记忆合金柔性致动器在小型化、高度集成化设备中的应用。
7、二是以上方案需要通过弹性力恢复原始形状。即在一个驱动周期中,先驱动形状记忆合金使致动器产生形变,再停止驱动形状记忆合金通过弹性力恢复初始状态。该问题限制了致动器的输出能力与驱动频率,大幅影响了致动器的驱动能力。
8、上述不足致使现有柔性形状记忆合金致动器无法用于制备超轻薄小型柔性机器人、小型机械爪等小型轻量化柔性设备。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提供一种基于形状记忆合金丝的超轻薄柔性致动器,以在能够实现双向驱动的前提下,减小致动器质量及厚度,提高致动器轻薄化、柔性化程度,提升致动器形变量与驱动频率。
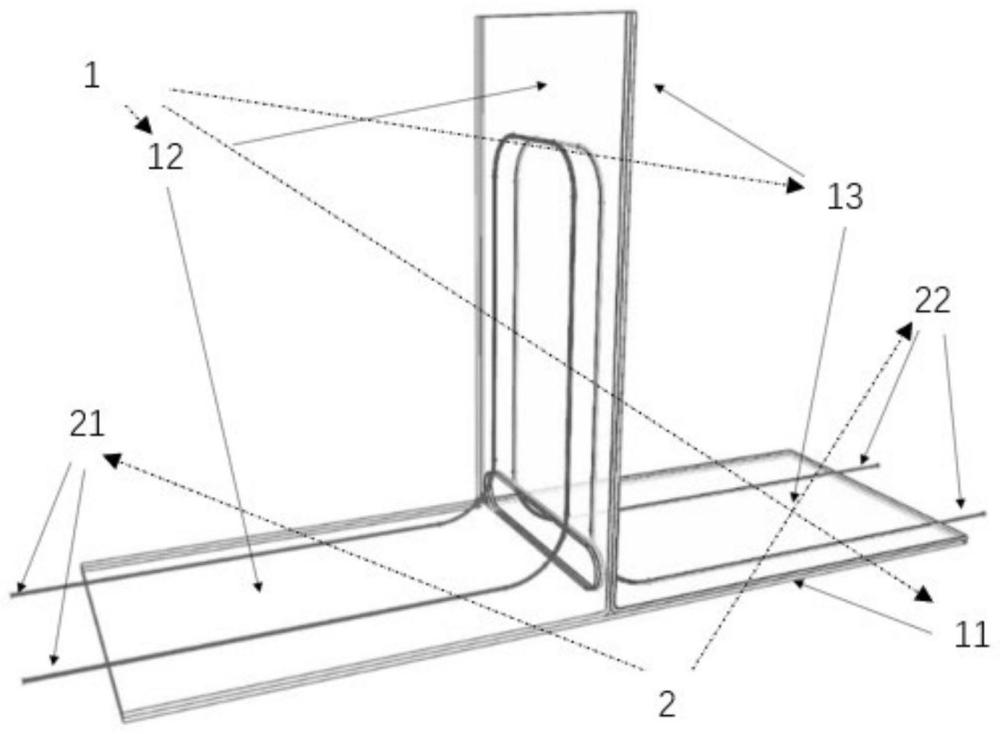
2、为解决以上技术问题,本发明基于形状记忆合金丝的超轻薄柔性致动器,包括柔性基底1和形状记忆合金丝2,其特征在于:
3、所述柔性基底1包括底层11和分布在该低层上的两个约束形状记忆合金形变效果的约束层12和13;
4、所述形状记忆合金丝2,设为对称的两根,分别分布在两个约束层12和13之上,用于提供向不同方向的驱动与恢复能力;
5、所述两个约束形状记忆合金形变效果的约束层12和13,其上半部分之间相互粘结,下半部分分别弯折后对称粘结在底层11中部,构成t型整体结构。
6、进一步,每片约束层的中部均切割有一个用于提升致动器形变量的圆矩形切口31,该圆矩形切口的两侧约束层上设有偶数圆形通孔32,用以约束形状记忆合金丝2的形状。
7、进一步,所述柔性基底中底层11和两个约束层12和13,均采用相同的非弹性薄膜材料,其包括聚酰亚胺、聚氯乙烯、聚对苯二甲酸乙二醇酯材料中的任意一种。
8、进一步,所述形状记忆合金丝2为等长的两根形状记忆金属丝,且通过编织的方式分别穿过两片约束层上的通孔32,对其形变进行约束。
9、进一步,所述柔性基底中底层11和两个约束层12和13均为矩形,且两片约束层的大小完全相同,该底层11的高度可根据所需致动器大小设定,宽度则与约束层宽度相同。
10、进一步,其特征在于,所述两个约束层12和13上的圆形通孔32均匀分布在约束层边缘内侧,且距离一侧边缘的间距略大于另一侧。
11、本发明与现有技术相比,具有如下优点:
12、本发明由于采用编织方式将形状记忆金属丝固定在约束层上,采用约束层对两根形状记忆合金丝进行形变约束,采用t字形的整体结构,实现了在两根形状记忆合金丝交替驱动的情况下,稳定的双向驱动效果,且具备超轻、超薄、柔性化程度高的特性以及更高的致动性能,为制备超轻薄小型柔性机器人、小型机械爪等小型轻量化柔性设备,提供了极高的应用价值。
技术特征:1.一种基于形状记忆合金丝的超轻薄柔性致动器,包括柔性基底(1)和形状记忆合金丝(2),其特征在于:
2.根据权利要求1所述的致动器,其特征在,每片约束层的中部均切割有一个用于提升致动器形变量的圆矩形切口(31),该圆矩形切口的两侧约束层上设有偶数个圆形通孔(32),用以约束形状记忆合金丝(2)的形状。
3.根据权利要求1所述的致动器,其特征在,所述柔性基底中底层(11)和两个约束层(12,13),均采用相同的非弹性薄膜材料,其包括聚酰亚胺、聚氯乙烯、聚对苯二甲酸乙二醇酯材料中的任意一种。
4.根据权利要求1所述的致动器,其特征在于,所述形状记忆合金丝(2)为等长的两根形状记忆金属丝,且通过编织的方式分别穿过两片约束层上的通孔(32),对其形变进行约束。
5.根据权利要求1所述的致动器,其特征在于,所述柔性基底中底层(11)和两个约束层(12,13)均为矩形,且两片约束层的大小完全相同,该底层(11)的高度h1可根据所需致动器大小设定,宽度w1则与约束层宽度w2相同。
6.根据权利要求1所述的致动器,其特征在于,所述两个约束层(12)和(13)上的圆形通孔(32)均匀分布在约束层边缘内侧,且距离一侧边缘的间距l1略大于另一侧l2。
7.根据权利要求2所述的致动器,其特征在于,每个约束层上的圆矩形切口(31)长度l3略小于约束层的宽度w2,以降低约束层对致动器致动状态的影响。
8.根据权利要求2所述的致动器,其特征在于,每个人约束层上的圆形通孔(32),其直径φ1略大于所穿形状记忆合金丝(2)的直径φ2,以最大程度限制形状记忆合金丝的形变。
技术总结本发明公开了一种基于形状记忆合金丝的超轻薄柔性致动器,主要解决现有技术柔性化和轻薄化程度低,不利于小型柔性机械结构集成的问题。其包括柔性基底(1)和形状记忆合金丝(2),该柔性基底采用超薄非弹性薄膜材料,其包括底层(11)和分布在该低层上的两个约束形状记忆合金形变效果的约束层(12,13);该形状记忆合金丝设为对称的两根(21,22),分别分布在两个约束层之上,用于提供向不同方向的驱动与恢复能力;两个约束层其上半部分之间相互粘结,下半部分分别弯折后对称粘结在底层中部,构成T型整体结构。本发明具有超轻、超薄、柔性化程度高的特性,可用于驱动现有机器人、机械爪设备,或是开发新型柔性机器人与机械爪等设备。技术研发人员:吕晓洲,刘奕扬,史尧光受保护的技术使用者:西安电子科技大学技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240726/126431.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种霍尔推力器的制作方法
下一篇
返回列表