基于双流DAMAS-CNN的真空管线漏点定位方法与流程
- 国知局
- 2024-07-30 12:26:59
本发明涉及声源定位,尤其涉及一种基于双流damas-cnn的真空管线漏点定位方法。
背景技术:
1、为突破高速列车的速度极限,随着磁浮技术的发展,真空管线逐渐成为超高速磁浮列车领域的研究热点之一,在真空管道条件下推进能源的摩擦、热损耗更少,可以更有效的转化为列车的推进动力。但列车的长区间、多站点特点导致了真空管道磁浮列车系统的管线主要特征为:线路长、尺寸大、工作时间长、尽量避免频繁抽(复)压等,因此为保证线路的运行安全,需要对管线进行长周期、稳定的检测,其中管道漏点为最重要的检测项目之一。
2、在以往针对长大真空管线的漏点检测中,考虑到管线的尺寸,周围环境等因素,最常用的检测方式为人工巡检。在管道低压情况下,人工巡线并通过“听声辩位”方法确定管道漏点严重程度和位置。但通过人工巡检的方式存在较多弊端,如检测的持续性、频率以及误检率、漏检率方面很难达到预期,同时巡检过程中有较多隐患,对人身安全造成威胁。
技术实现思路
1、本发明提供了一种基于双流damas-cnn的真空管线漏点定位方法,能够解决现有技术中的问题。
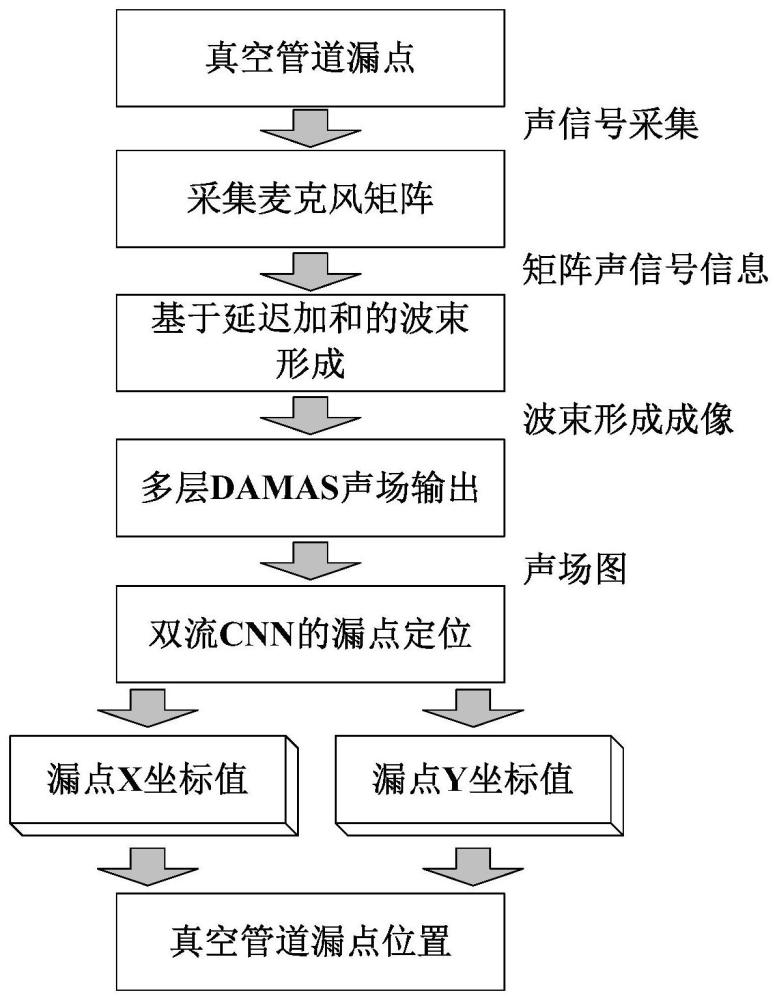
2、本发明提供了一种基于双流damas-cnn的真空管线漏点定位方法,其中,该方法包括:
3、通过音频传感器阵列采集真空管线内设备运行中的音频信号;
4、根据采集的音频信号进行基于延迟加和的波束形成成像,得到延迟加和波束形成成像结果;
5、建立多层damas网络模型,根据延迟加和波束形成成像结果和多层damas网络模型生成声场图,声场图包括真空管线漏点在其上的位置信息;
6、建立双流cnn网络模型,根据声场图和双流cnn网络模型得到真空管线漏点的实际位置坐标。
7、优选地,根据采集的音频信号进行基于延迟加和的波束形成成像,得到延迟加和波束形成成像结果包括:
8、根据采集的音频信号计算互谱矩阵;
9、根据互谱矩阵计算延迟求和导向响应;
10、计算延迟求和导向响应复共轭乘积并归一化得到故障选频的延迟加和波束形成成像结果。
11、优选地,通过下式计算互谱矩阵:
12、
13、其中,csm为互谱矩阵,为由m个音频传感器构成的采集阵列所采集的音频信号短时傅里叶变换结果,m为可开方的整数,i为短时傅里叶变换结果的自变量,w、p和f*为选频得到的具有特定宽度的分析窗口、窗口步长和漏点声频特征频段,k为互谱矩阵分辨率系数,np为短时傅里叶变换点数。
14、优选地,通过下式计算延迟求和导向响应:
15、s=(w×ee)t×csm×(ee×w),
16、其中,s为延迟求和导向响应,w为的均匀矩阵,w所有元素都为ee为导向向量。
17、优选地,通过下式计算导向向量ee:
18、e=sin(tht)×cos(phi)+sin(tht)×sin(phi)+cos(tht),
19、
20、其中,为导向指数e的复共轭向量,tht和phi分别为声场中的假定目标声源点与音频传感器阵列中心点的水平夹角和垂直夹角。
21、优选地,通过下式得到延迟加和波束成像结果:
22、
23、其中,为延迟求和导向响应s的复共轭矩阵,max()表示取最大值,dasm为在漏点声频特征频段f*下的延迟加和波束形成成像结果。
24、优选地,建立多层damas网络模型,根据延迟加和波束形成成像结果和多层damas网络模型生成声场图包括:
25、建立多层damas网络模型,多层damas网络模型包括一个输入层、三个反卷积层和一个输出层;
26、将延迟加和波束形成成像结果作为多层damas网络模型的输入,并将延迟加和波束形成成像结果对应的声源点所在位置作为对应多层damas网络模型输出的输出层标签,对多层damas网络模型进行训练;
27、将延迟加和波束形成成像结果输入到训练后的多层damas网络模型中,输出得到声场图。
28、优选地,建立双流cnn网络模型,根据声场图和双流cnn网络模型得到真空管线漏点的实际位置坐标包括:
29、建立双流cnn网络模型,双流cnn网络模型包括一个输入层、四个卷积层、一个全连接层和一个双通道输出层;
30、将多层damas网络模型输出的声场图作为双流cnn网络模型的输入,并将声场图对应的声源点所在位置作为对应双流cnn网络模型的双通道输出的双通道输出层标签,对双流cnn网络模型进行训练;
31、将多层damas网络模型输出的声场图输入到训练后的双流cnn网络模型中,得到真空管线漏点的实际位置坐标。
32、通过上述技术方案,通过多层damas网络模型获得音频传感器阵列获得的声源信号的声场图,并在声场图的基础上利用双流cnn网络模型获得去除背景噪声的漏点声源在声场图中的横、纵坐标,从而确定真空管线漏点位置,提高检测连续性、准确度的同时提高检测的安全性,为真空管线的维护提供信息支撑。
技术特征:1.一种基于双流damas-cnn的真空管线漏点定位方法,其特征在于,该方法包括:
2.根据权利要求1所述的方法,其特征在于,根据采集的音频信号进行基于延迟加和的波束形成成像,得到延迟加和波束形成成像结果包括:
3.根据权利要求2所述的方法,其特征在于,通过下式计算互谱矩阵:
4.根据权利要求3所述的方法,其特征在于,通过下式计算延迟求和导向响应:
5.根据权利要求4所述的方法,其特征在于,通过下式计算导向向量ee:
6.根据权利要求5所述的方法,其特征在于,通过下式得到延迟加和波束成像结果:
7.根据权利要求6所述的方法,其特征在于,建立多层damas网络模型,根据延迟加和波束形成成像结果和多层damas网络模型生成声场图包括:
8.根据权利要求7所述的方法,其特征在于,建立双流cnn网络模型,根据声场图和双流cnn网络模型得到真空管线漏点的实际位置坐标包括:
技术总结本发明涉及声源定位技术领域,公开了一种基于双流DAMAS‑CNN的真空管线漏点定位方法。其中,该方法包括:通过音频传感器阵列采集真空管线内设备运行中的音频信号;根据采集的音频信号进行基于延迟加和的波束形成成像,得到延迟加和波束形成成像结果;建立多层DAMAS网络模型,根据延迟加和波束形成成像结果和多层DAMAS网络模型生成声场图,声场图包括真空管线漏点在其上的位置信息;建立双流CNN网络模型,根据声场图和双流CNN网络模型得到真空管线漏点的实际位置坐标。由此,可以确定真空管线漏点位置,为真空管线的维护提供信息支撑。技术研发人员:张艳清,张国华,蒋沁宇,张明跃,李萍受保护的技术使用者:中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240729/160547.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表