一种毫米波雷达的目标航向角确定方法与流程
- 国知局
- 2024-07-30 10:54:32
本发明涉及毫米波雷达信号处理领域,尤其涉及一种毫米波雷达的目标航向角确定方法。
背景技术:
1、普通毫米波雷达由于水平角度分辨率不够小,目标点云密度不足,因此输出的目标航向角一般误差都较大,在多传感器融合阶段一般都不参考该值或将该值的权重设置很低,但随着多芯片级联的4d毫米波雷达问世,其水平角度分辨率行业平均水平达到了1.5°上下,每个目标的点云近乎可以描述目标的真实轮廓,此时目标航向角如果使用了合理的拟合方式,可以得到足够准确的结果为后续多传感器融合服务。
2、专利cn202010244026.6公开了一种用于毫米波雷达目标跟踪的点云划分与航迹匹配方法,本方法对于目标航向角的赋值一般采用多帧追踪后目标的速度方向来确定的,这样的方式在通常情况下得出的结果可以满足需求,但对于速度较低的目标拟合效果不好,且此方法难以对单帧点云生成目标的航向角有着准确的结果。
技术实现思路
1、本发明一种毫米波雷达的目标航向角确定方法,解决单一方法计算航向角不准确的问题。
2、本发明的技术方案如下:一种毫米波雷达的目标航向角确定方法,包括:
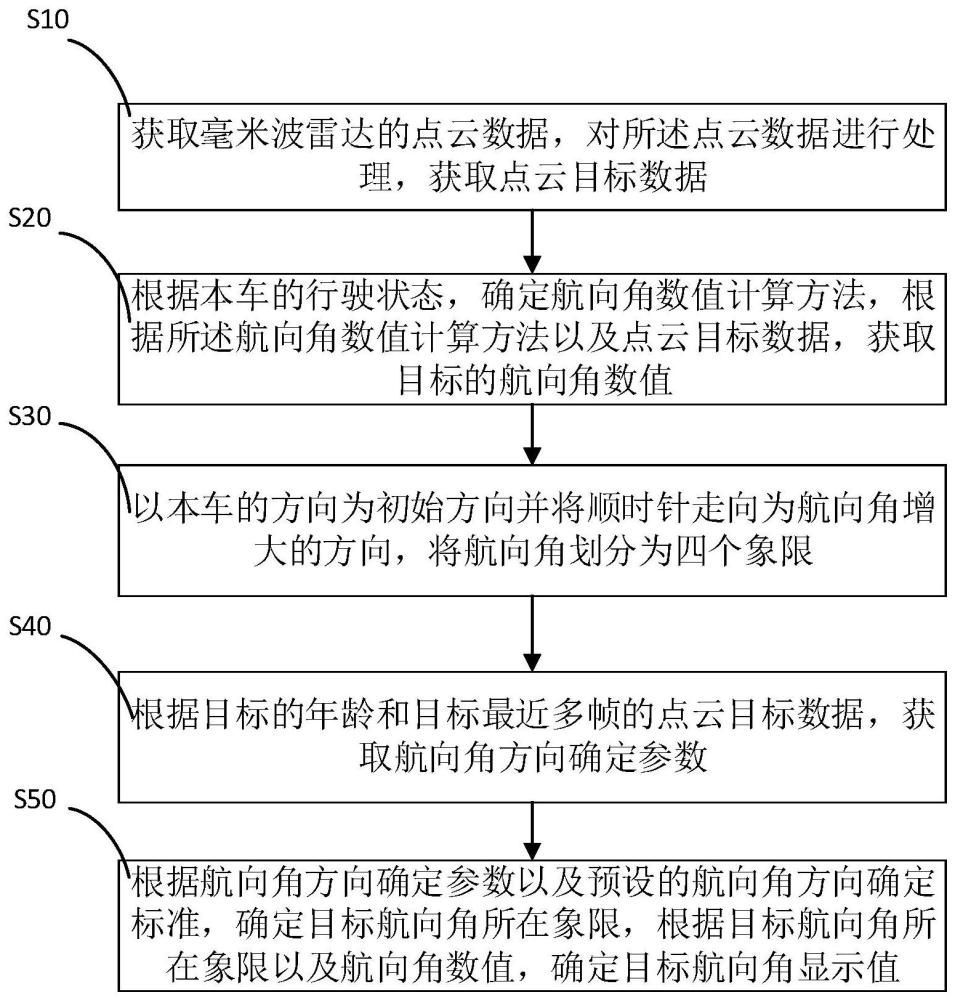
3、s10:获取毫米波雷达的点云数据,对所述点云数据进行处理,获取点云目标数据,所述点云目标数据包括:横向速度值、纵向速度值、横向距离值和纵向距离值;
4、s20:根据本车的行驶状态,确定航向角数值计算方法,根据所述航向角数值计算方法以及点云目标数据,获取目标的航向角数值;
5、s30:以本车的方向为初始方向并将顺时针走向为航向角增大的方向,将航向角划分为四个象限;
6、s40:根据目标的年龄和目标最近多帧的点云目标数据,获取航向角方向确定参数,所述航向角方向确定参数包括航向角x方向值和航向角y方向值;
7、s50:根据航向角方向确定参数以及预设的航向角方向确定标准,确定目标航向角所在象限,根据目标航向角所在象限以及航向角数值,确定目标航向角显示值。
8、进一步地,所述步骤s20包括:
9、对本车的行驶状态进行判断,当本车处于高速行驶状态时,采用第一航向角数值计算方法,当本车不处于高速行驶状态时,采用第二航向角数值计算方法。
10、进一步地,所述第一航向角数值计算方法包括:
11、根据点云目标数据中的横向速度值、纵向速度值以及本车的车速,确定目标绝对横向速度和目标绝对纵向速度;
12、将目标绝对横向速度和目标绝对纵向速度进行反正切函数运算,获取目标的航向角数值。
13、进一步地,所述第二航向角数值计算方法包括:
14、将点云目标数据中的横向距离值和纵向距离值进行反正切函数运算,获取目标的航向角数值。
15、进一步地,当本车处于低速行驶状态时,通过第二航向角数值计算获得目标本帧的航向角数值与最近若干帧的航向角数值的平均值,若两者的差值大于预设阈值,则将上帧中目标的航向角数值替代本帧中目标的航向角数值。
16、进一步地,所述步骤s40包括:
17、当目标的年龄大于年龄阈值时,将目标最近若干帧的所有横向距离值和纵向距离值以及本帧的横向距离值和纵向距离值进行拟合,获取横向距离斜率以及纵向距离斜率,所述航向角x方向值为横向距离斜率,所述航向角y方向值为纵向距离斜率;
18、当目标的年龄小于年龄阈值时,所述航向角x方向值为目标本帧的横向距离值与目标前一帧的横向距离值的差值,所述航向角y方向值为目标本帧的纵向距离值与目标前一帧的纵向距离值的差值。
19、进一步地,所述将目标最近若干帧的所有横向距离值和纵向距离值以及本帧的横向距离值和纵向距离值进行拟合,获取横向距离斜率以及纵向距离斜率,包括:
20、获取目标最近若干帧以及本帧的所有横向距离值的横向距离平均值和所有纵向距离值平均值;
21、获取目标最近若干帧以及本帧的每个横向距离值与横向距离平均值之间的横向距离差值以及每个纵向距离值与纵向距离值平均值之间的纵向距离差值;
22、将所有横向距离差值进行直线拟合,获取拟合后直线的横向距离斜率;
23、将所有纵向距离差值进行直线拟合,获取拟合后直线的纵向距离斜率。
24、进一步地,所述年龄阈值为20。
25、进一步地,所述步骤s50中,所述航向角方向确定标准包括:
26、当航向角x方向值和航向角y方向值均大于等于0时,所述目标的航向角位于第一象限;
27、当航向角x方向值大于等于0且航向角y方向值小于0时,所述目标的航向角位于第四象限。
28、当航向角x方向值和航向角y方向值均小于等于0时,所述目标的航向角位于第三象限;
29、当航向角x方向值小于0且航向角y方向值大于等于0时,所述目标的航向角位于第二象限。
30、进一步地,所述步骤s50中,根据目标航向角所在象限以及航向角数值,确定目标航向角显示值包括:
31、当所述目标的航向角位于第一象限时,所述目标航向角显示值为目标航向角数值;
32、当所述目标的航向角位于第四象限时,所述目标航向角显示值为360°-目标航向角数值的绝对值;
33、当所述目标的航向角位于第三象限时,所述目标航向角显示值为180°+目标航向角数值的绝对值;
34、当所述目标的航向角位于第二象限时,所述目标航向角显示值为180°-目标航向角数值的绝对值。
35、本发明的有益效果:本发明通过根据本车的行驶状态,采用不同的方法确定航向角数值,并根据目标的年龄,采用不同的方法确定航向角方向,从而提升雷达探测到的交通车目标航向角的准确性,更好的表征环境中目标的行驶方向。
技术特征:1.一种毫米波雷达的目标航向角确定方法,其特征在于,包括:
2.如权利要求1所述的毫米波雷达的目标航向角确定方法,其特征在于,所述步骤s20包括:
3.如权利要求2所述的毫米波雷达的目标航向角确定方法,其特征在于,所述第一航向角数值计算方法包括:
4.如权利要求2所述的毫米波雷达的目标航向角确定方法,其特征在于,所述第二航向角数值计算方法包括:
5.如权利要求4所述的毫米波雷达的目标航向角确定方法,其特征在于,当本车处于低速行驶状态时,通过第二航向角数值计算获得目标本帧的航向角数值与最近若干帧的航向角数值的平均值,若两者的差值大于预设阈值,则将上帧中目标的航向角数值替代本帧中目标的航向角数值。
6.如权利要求1所述的毫米波雷达的目标航向角确定方法,其特征在于,所述步骤s40包括:
7.如权利要求6所述的毫米波雷达的目标航向角确定方法,其特征在于,所述将目标最近若干帧的所有横向距离值和纵向距离值以及本帧的横向距离值和纵向距离值进行拟合,获取横向距离斜率以及纵向距离斜率,包括:
8.如权利要求6所述的毫米波雷达的目标航向角确定方法,其特征在于,所述年龄阈值为20。
9.如权利要求1所述的毫米波雷达的目标航向角确定方法,其特征在于,所述步骤s50中,所述航向角方向确定标准包括:
10.如权利要求1所述的毫米波雷达的目标航向角确定方法,其特征在于,所述步骤s50中,根据目标航向角所在象限以及航向角数值,确定目标航向角显示值包括:
技术总结本发明涉及一种毫米波雷达的目标航向角确定方法,包括:获取毫米波雷达的点云数据,对所述点云数据进行处理,获取点云目标数据;根据本车的行驶状态,确定航向角数值计算方法,根据所述航向角数值计算方法以及点云目标数据,获取目标的航向角数值;以本车的方向为初始方向并将顺时针走向为航向角增大的方向,将航向角划分为四个象限;根据目标的年龄和目标最近多帧的点云目标数据,获取航向角方向确定参数;根据航向角方向确定参数以及预设的航向角方向确定标准,确定目标航向角所在象限,根据目标航向角所在象限以及航向角数值,确定目标航向角显示值。本发明能够提升雷达探测到的交通车目标航向角的准确性,更好的表征环境中目标的行驶方向。技术研发人员:屈操,郭枰,陶烨受保护的技术使用者:无锡威孚高科技集团股份有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/154863.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表