一种实孔径毫米波雷达图像去噪方法
- 国知局
- 2024-07-31 23:02:08
本发明属于图像处理,尤其涉及一种实孔径毫米波雷达图像去噪方法。
背景技术:
1、近年来,高级驾驶辅助系统(advanced driving assistance system,adas)作为汽车的热点话题和研发方向之一,吸引了广泛的注意。随着从adas到自动驾驶的过渡,未来自动驾驶系统面临着的一个巨大问题就是在各种环境下对不同道路环境的感知问题。广泛使用的传感器有摄像头、激光雷达和毫米波雷达。但摄像头对周围环境非常敏感,并且受到光照的干扰较大。激光雷达产生的激光在雨、雾、沙等恶劣天气下会受到阻塞干扰。
2、而毫米波雷达对于道路环境感知具有很大优势。首先,毫米波雷达具有良好的穿透性,能够在雨、雾、沙尘等恶劣天气条件下依然保持较高的探测性能。其次,毫米波雷达的工作频率高,可以实现对目标物体的高分辨率探测,即使是小型物体或者低反射率的目标也能够被有效地检测到。而且毫米波雷达的探测距离较远,可以实现对远距离目标的有效感知。这意味着在高速行驶或者复杂路况下,自动驾驶系统可以提前获知远处的交通情况或者障碍物,有足够的时间做出相应的决策和规避动作,从而减少事故的发生概率。毫米波雷达对于道路环境感知的优势,引起了广泛的关注。
3、虽然毫米波雷达对于道路环境感知具有很大优势,然而当毫米波雷达向目标发射波束时,波在发射方向上散射并以多个方向反射和相互干扰,散射波的振幅和相位发生变化,在雷达图像上呈现为散斑噪声。雷达图像的质量直接影响道路环境感知效果,因此,毫米波雷达图像去噪方法十分重要。
技术实现思路
1、发明目的:本发明的目的在于提供一种实孔径毫米波雷达图像去噪方法,采用该方法解决实孔径毫米波雷达图像去噪效果不明显及去噪结果边缘纹理不清晰的问题。
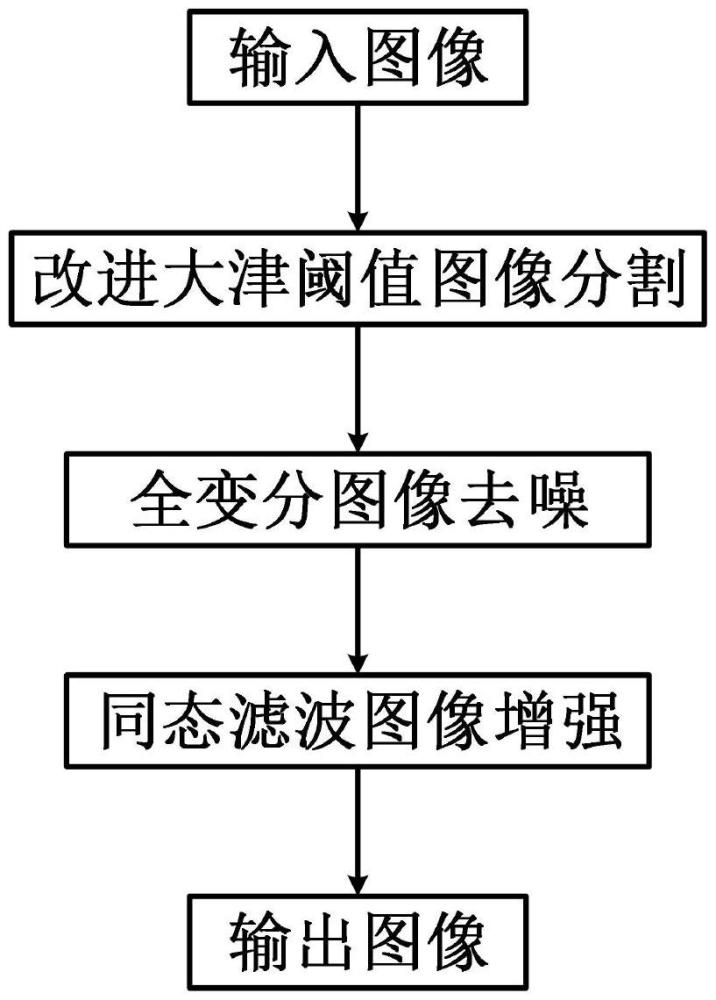
2、技术方案:本发明的一种实孔径毫米波雷达图像去噪方法,包括如下步骤:
3、步骤1、输入实孔径毫米波雷达图像,利用改进的大津阈值算法计算实孔径毫米波雷达图像的最佳阈值t;
4、步骤2、根据最佳阈值t,确定实孔径毫米波雷达图像的背景域和前景域;
5、步骤3、将背景域的像素值设为零,使用全变分模型对前景域进行去噪,得到初步去噪图像;
6、步骤4、基于照明反射模型rrm和同态滤波对初步去噪图像进行图像增强,得到最终去噪图像。
7、进一步的,步骤1具体为:利用改进的大津阈值算法计算实孔径毫米波雷达图像的最佳阈值t,具体如下:
8、设图像的像素灰度级为g=1,2,…,l,级别为i的像素点数由gi表示,图像的像素总数n=g1+g2+…+gl。处于灰度级为i的像素点在图像中出现的概率为其中pi≥0,通过选取一个级别为t的像素值作为阈值,将图像像素分为两个类别:背景像素c0和前景像素c1,c0={1,2,…,t},c1={t+1,t+2,…,l}。
9、
10、
11、
12、
13、
14、最佳阈值
15、其中的变量说明:p0(t)为背景像素点占整幅图像的比例,μ0(t)为p0(t)平均灰度,p1(t)为前景像素点占整幅图像的比例,μ1(t)为p1(t)平均灰度,μ为整幅图像的平均灰度,为图像的类间方差,k为调节因子。
16、进一步的,步骤2具体为:
17、根据最佳阈值t,确定实孔径毫米波雷达图像的背景域和前景域,具体如下:
18、
19、进一步的,步骤3具体包括如下步骤:
20、步骤3.1、tv图像去噪是含有噪声的图像的全变分明显大于无噪声图像的全变分,将图像去噪问题转化为最小化能量泛函的问题,tv图像去噪模型的定义如下:
21、
22、
23、minj(u)=g(u)+h(u)#(9)
24、其中的变量说明:j(u)表示能量泛函,g(u)为正则项,h(u)为保真项,ω表示图像的定义域,u是去噪图像,u0是噪声图像,是梯度向量的l2范数,λ是lagrange权重参数并满足λ>0;
25、步骤3.2、应用变分法,得到全变分模型的偏微分方程,如式(10)所示:
26、
27、步骤3.3、使用梯度下降法解方程得到tv模型:
28、
29、其中的变量说明:为扩散系数,为梯度幅值。
30、进一步的,步骤4具体包括如下步骤:
31、步骤4.1、基于照明反射模型rrm将图像p(x,y)分成两个分量,并应用对数变换将这两个变量进行分离;
32、步骤4.2、采用傅里叶变换,将图像从空间域转换到频域,得到频域图像p(u,v);
33、步骤4.3、对频域图像p(u,v)应用改进的高斯高通滤波器q(u,v),增强高频分量并抑制低频分量;
34、步骤4.4、使用逆傅里叶变换将频域图像转换到空间域;
35、步骤4.5、利用指数函数重建图像,获得最终去噪图像。
36、进一步的,步骤4.1具体为:基于照明反射模型rrm将图像分成两个分量,并应用对数变换将这两个变量进行分离:
37、p(x,y)=pi(x,y)·pr(x,y)#((12)
38、ln[p(x,y)]=ln[pi(x,y)·pr(x,y)]=ln[pi(x,y)]+ln[pr(x,y)]#(13)
39、其中的变量说明:pi(x,y)是照度分量,范围为[0,∞],pr(x,y)是反射分量,范围为[0,1]。
40、进一步的,步骤4.2具体为:采用傅里叶变换,将图像从空间域转换到频域,得到频域图像p(u,v):
41、
42、进一步的,步骤4.3具体为:对p(u,v)应用改进的高斯高通滤波器q(u,v),增强高频分量并抑制低频分量,得到滤波后的图像s(u,v):
43、
44、s(u,v)=q(u,v)p(u,v)=q(u,v)pi(u,v)+q(u,v)pr(u,v)#(16)
45、其中的变量说明:c控制斜率,ph是高频增益,pl是低频增益,d(u,v)是(0,0)和(u,v)之间的距离,d0是截止频率。
46、进一步的,步骤4.4具体为:使用逆傅里叶变换将频域图像s(u,v)转换到空间域:
47、ifft{s(u,v)}=ifft{q(u,v)pi(u,v)}+ifft{q(u,v)pr(u,v)}#(17)
48、式(17)被简化为:
49、ln[s(x,y)]=ln[zi(x,y)]+ln[zr(x,y)]#(18)
50、其中的变量说明:zi(x,y)是处理后的照度分量,zr(x,y)是处理后的反射分量。
51、进一步的,步骤4.5具体为:利用指数函数重建图像,获得最终去噪图像z(x,y):
52、
53、有益效果:与现有技术相比,本发明具有如下显著优点:
54、1、本发明提出了一种实孔径毫米波雷达图像去噪方法,能够显著去除图像中的噪声,提高图像的清晰度和对比度。
55、2、本发明能够在去除噪声的同时,有效保留图像的边缘信息,克服了多数方法在去噪和边缘保留之间难以平衡的技术难点。实验数据表明,本发明与nlm和ppb等去噪方法相比,β指数提高了20%。
56、3、本发明不仅实现了高效去噪,还具有较高的计算效率。实验数据表明,在相同的硬件环境下,本发明的处理速度相比nlm和ppb等去噪方法提高了70%。
57、4、本发明在不同场景下的实孔径毫米波雷达图像上均表现出优异的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195707.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表