考虑不确定性因素下的多单元结构鲁棒协同控制方法
- 国知局
- 2024-07-31 23:43:15
本技术涉及多单元协同控制,特别是涉及一种考虑不确定性因素下的多单元结构鲁棒协同控制方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、多单元协同运输为多个移动机器人协同运输一个负载,该多个移动机器人和负载构成多单元协同运输系统。例如,双无人车协同运输就是一种多单元协同运输,该双无人车和双无人车协同运输的负载构成多单元协同运输系统。相关的多单元结构协同控制方法主要为鲁棒控制方法。鲁棒控制方法为在确定性条件下使控制系统稳定。
2、然而,车辆在实际运行中,不可避免会存在大量参数不确定性、外部干扰、通讯障碍(如数据丢失、通信迟滞、数据错误等)及约束不确定性等问题,对车辆控制的稳定性造成了巨大挑战。因此,相关的多单元结构协同控制方法与实际运行情况不符,车辆控制的准确性差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高车辆控制的准确性的考虑不确定性因素下的多单元结构鲁棒协同控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种考虑不确定性因素下的多单元结构鲁棒协同控制方法,包括:
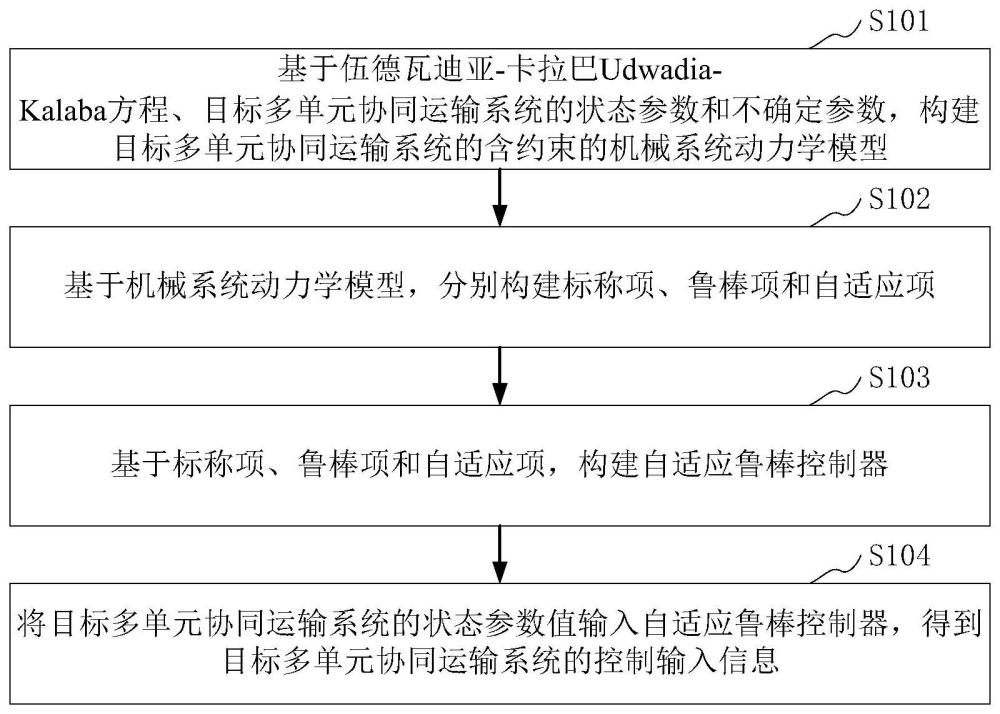
3、基于伍德瓦迪亚-卡拉巴udwadia-kalaba方程、目标多单元协同运输系统的状态参数和不确定参数,构建所述目标多单元协同运输系统的含约束的机械系统动力学模型;所述机械系统动力学模型包括已确定部分和不确定性部分;所述不确定性部分用于模拟所述目标多单元协同运输系统的在运行过程中的不确定性;
4、基于所述机械系统动力学模型,分别构建标称项、鲁棒项和自适应项;所述自适应项是基于自适应参数矢量得到的,用于估计不确定性边界;所述自适应参数矢量受泄露型的自适应律支配;
5、基于所述标称项、所述鲁棒项和所述自适应项,构建自适应鲁棒控制器;
6、将所述目标多单元协同运输系统的状态参数值输入所述自适应鲁棒控制器,得到所述目标多单元协同运输系统的控制输入信息。
7、在其中一个实施例中,所述方法还包括:
8、基于所述机械系统动力学模型和误差函数的表达式,构建误差函数;
9、基于预先确定的自适应律增益、不确定性边界和所述误差函数,构建自适应律的非负项;
10、基于所述误差函数和所述自适应参数矢量,构建自适应律的泄露量;
11、基于所述非负项和所述泄露量,构建自适应律。
12、在其中一个实施例中,所述方法还包括:
13、基于预设的系统稳态性能权重系数、系统控制成本权重系数、预先确定的不确定性边界下界参数、预设的鲁棒增益边界参数、自适应参数、单位矩阵、所述机械系统动力学模型和重心去模糊算法,构建所述机械系统动力学模型的约束优化问题的最优解;所述最优解为所述机械系统动力学模型的系统性能指标全局最小时对应的自适应律参数解;
14、将所述最优解,作为所述自适应律增益。
15、在其中一个实施例中,所述基于所述机械系统动力学模型,分别构建标称项、鲁棒项和自适应项,包括:
16、基于预先确定的自适应参数矢量、所述机械系统动力学模型和不确定性边界的表达式,构建不确定性边界;
17、基于误差函数、所述不确定性边界和鲁棒控制增益的表达式,构建鲁棒控制增益;
18、基于所述机械系统动力学模型、所述不确定性边界、所述误差函数和所述鲁棒控制增益,构建自适应项;
19、基于所述机械系统动力学模型,分别构建标称项和鲁棒项。
20、在其中一个实施例中,所述鲁棒控制增益的表达式为:
21、
22、
23、其中,λ(‖ρ‖)为鲁棒控制增益,ρ为中间变量,为不确定性边界,为误差函数,a(q,t)为约束矩阵,c(q,t)为约束矩阵a对应的m维一阶结果列矢量,η为鲁棒增益边界参数,n为鲁棒增益性能参数,n是正整数且n≥2,η>0。
24、在其中一个实施例中,所述基于所述标称项、所述鲁棒项和所述自适应项,构建自适应鲁棒控制器,包括:
25、将所述标称项、所述鲁棒项和所述自适应项相加,得到自适应鲁棒控制器的控制输入表达式。
26、第二方面,本技术还提供了一种考虑不确定性因素下的多单元结构鲁棒协同控制装置,包括:
27、第一构建模块,用于基于伍德瓦迪亚-卡拉巴udwadia-kalaba方程、目标多单元协同运输系统的状态参数和不确定参数,构建所述目标多单元协同运输系统的含约束的机械系统动力学模型;所述机械系统动力学模型包括已确定部分和不确定性部分;所述不确定性部分用于模拟所述目标多单元协同运输系统的在运行过程中的不确定性;
28、第二构建模块,用于基于所述机械系统动力学模型,分别构建标称项、鲁棒项和自适应项;所述自适应项是基于自适应参数矢量得到的,用于估计不确定性边界;所述自适应参数矢量受泄露型的自适应律支配;
29、第三构建模块,用于基于所述标称项、所述鲁棒项和所述自适应项,构建自适应鲁棒控制器;
30、第一确定模块,用于将所述目标多单元协同运输系统的状态参数值输入所述自适应鲁棒控制器,得到所述目标多单元协同运输系统的控制输入信息。
31、在其中一个实施例中,所述装置还包括:
32、第四构建模块,用于基于所述机械系统动力学模型和误差函数的表达式,构建误差函数;
33、第五构建模块,用于基于预先确定的自适应律增益、不确定性边界和所述误差函数,构建自适应律的非负项;
34、第六构建模块,用于基于所述误差函数和所述自适应参数矢量,构建自适应律的泄露量;
35、第七构建模块,用于基于所述非负项和所述泄露量,构建自适应律。
36、在其中一个实施例中,所述装置还包括:
37、第八构建模块,用于基于预设的系统稳态性能权重系数、系统控制成本权重系数、预先确定的不确定性边界下界参数、预设的鲁棒增益边界参数、自适应参数、单位矩阵、所述机械系统动力学模型和重心去模糊算法,构建所述机械系统动力学模型的约束优化问题的最优解;所述最优解为所述机械系统动力学模型的系统性能指标全局最小时对应的自适应律参数解;
38、第二确定模块,用于将所述最优解,作为所述自适应律增益。
39、在其中一个实施例中,所述第二构建模块,具体用于:
40、基于预先确定的自适应参数矢量、所述机械系统动力学模型和不确定性边界的表达式,构建不确定性边界;
41、基于误差函数、所述不确定性边界和鲁棒控制增益的表达式,构建鲁棒控制增益;
42、基于所述机械系统动力学模型、所述不确定性边界、所述误差函数和所述鲁棒控制增益,构建自适应项;
43、基于所述机械系统动力学模型,分别构建标称项和鲁棒项。
44、在其中一个实施例中,所述鲁棒控制增益的表达式为:
45、
46、
47、其中,λ(‖ρ‖)为鲁棒控制增益,ρ为中间变量,为不确定性边界,为误差函数,a(q,t)为约束矩阵,c(q,t)为约束矩阵a对应的m维一阶结果列矢量,η为鲁棒增益边界参数,n为鲁棒增益性能参数,n是正整数且n≥2,η>0。
48、在其中一个实施例中,所述第三构建模块,具体用于:
49、将所述标称项、所述鲁棒项和所述自适应项相加,得到自适应鲁棒控制器的控制输入表达式。
50、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的步骤。
51、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的步骤。
52、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面所述的步骤。
53、上述考虑不确定性因素下的多单元结构鲁棒协同控制方法、装置、计算机设备、存储介质和计算机程序产品,基于伍德瓦迪亚-卡拉巴udwadia-kalaba方程、目标多单元协同运输系统的状态参数和不确定参数,构建所述目标多单元协同运输系统的含约束的机械系统动力学模型;所述机械系统动力学模型包括已确定部分和不确定性部分;所述不确定性部分用于模拟所述目标多单元协同运输系统的在运行过程中的不确定性;基于所述机械系统动力学模型,分别构建标称项、鲁棒项和自适应项;所述自适应项是基于自适应参数矢量得到的,用于估计不确定性边界;所述自适应参数矢量受泄露型的自适应律支配;基于所述标称项、所述鲁棒项和所述自适应项,构建自适应鲁棒控制器;将所述目标多单元协同运输系统的状态参数值输入所述自适应鲁棒控制器,得到所述目标多单元协同运输系统的控制输入信息。这样,通过考虑不确定参数,构建多单元协同运输系统的含约束的包含不确定性部分的机械系统动力学模型,并基于该模型,构建确定多单元协同运输系统的控制输入信息的自适应鲁棒控制器,该自适应鲁棒控制器不仅包含标称项和鲁棒项,还包含受泄露型自适应律支配的自适应项,能够估计不确定性边界,从而消除由外部干扰、建模误差等引起的不确定性,更加符合实际运行情况,能够提高车辆控制的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198260.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表