基于改进混合整数线性规划的电机装配产线节拍规划方法
- 国知局
- 2024-07-31 23:52:58
本发明属于电机装配,尤其是涉及一种使用于电机装配自动化生产线中的基于改进混合整数线性规划的电机装配产线节拍规划方法。
背景技术:
1、随着自动化技术的快速提升,在电机的制造过程中,基本已实现了自动化加工和装配,特别是在装配阶段,目前国内大型电机制造企业基本已采用了基于多机器人协同、视觉伺服图像处理、数据采集分析等技术的智能化自动装配产线,这使得电机产品装配一致性、装配精度等装配性能得到了很大提升。然而,由于装配机器人运动速度限制,同时又由于目前大多数自动化车间的装配节拍并未进行优化,使得目前电机装配产线普遍存在资源浪费、效率偏低、装配流程不稳定等问题,导致企业成本增加、交付延迟。因此,提出一种针对电机装配产线资源浪费、效率低下的节拍优化方法,对于企业快速地实现降本增效具有重要意义,也是电机行业目前关注的一大热点问题。
2、申请号为zl202111675458.3的专利公开了一种驱动电机转子铁芯整形生产线的变节拍协同控制组件,包括皮带输送机、设置在皮带输送机一侧的转角伺服电机、设置在转角伺服电机的电机轴上的节拍控制拨盘,节拍控制拨盘包括垂直固定在电机轴上端部位的用于从驱动电机转子铁芯前进方向的后方向前拨动驱动电机转子铁芯外圆的扇形拨块、设置在扇形拨块上远离扇形拨块弧形外缘位置的用于从驱动电机转子铁芯前进方向的前方挡住驱动电机转子铁芯外圆前进的悬臂挡条,在皮带输送机的另一侧正对于节拍控制拨盘的位置设置有指向扇形拨块正对侧面的红外线探测器,转角伺服电机、红外线探测器和皮带输送机分别连接plc控制器,实现了整形生产线的高可靠性变节拍协同控制。该方案虽然一定程度上可以实现节拍控制,然而该方案是通过采用由扇形拨块和悬臂挡条组成的节拍控制拨盘来实现对驱动电机转子铁芯的拨动与阻挡,而电机装配自动化生产线中混合整数线所涉及的产品与零部件规格众多,采用该节拍控制方法难以有效满足对混合装配线的装配节拍方案解决,难以适用于不同的电机装配线场景。同样存在资源浪费、效率偏低、装配流程不稳定等问题,导致企业成本增加、交付延迟等问题。
技术实现思路
1、本发明为解决现有电机装配自动化生产线存在着生产线资源浪费、效率偏低、装配流程不稳定等问题,导致企业成本增加、交付延迟等现状,提供一种基于改进混合整数线性规划的电机装配产线节拍规划方法,可对电机生产企业装配车间的资源调度及产线节拍规划,可适应更多不同电机装配产线场景,实现生产节拍的整体解决方案,实现高效高质量装配。
2、本发明为解决上述技术问题所采用的具体技术方案为:
3、基于改进混合整数线性规划的电机装配产线节拍规划方法,包括如下步骤:
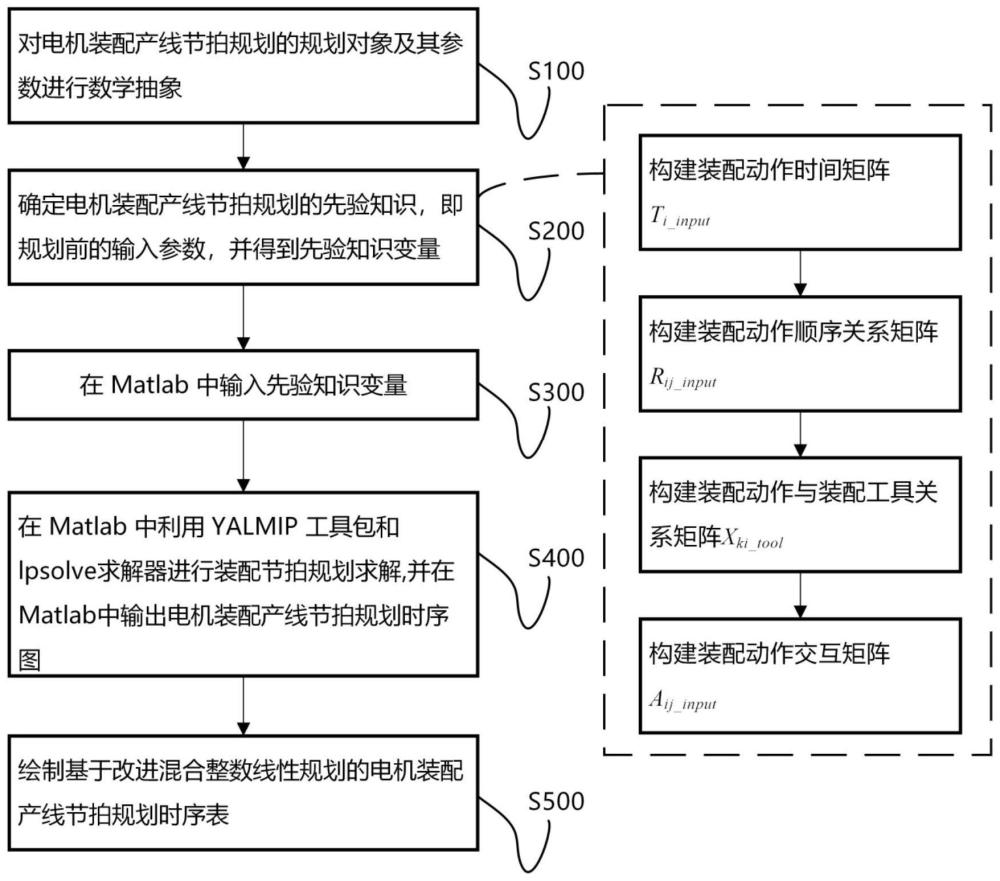
4、s100对电机装配产线节拍规划的规划对象及其参数进行数学抽象,形成电机装配产线节拍规划规划对象的数学表达;
5、s200确定电机装配产线节拍规划规划前的输入参数,得到先验知识变量;
6、s300在matlab中输入先验知识变量;
7、s400在matlab中利用yalmip工具包和lpsolve求解器进行电机装配节拍规划求解,得到基于改进混合整数线性规划的电机装配产线节拍规划结果的数学表征,并在matlab中输出电机装配产线节拍规划时序图;
8、s500根据输出的电机装配产线节拍规划时序图绘制基于改进混合整数线性规划的电机装配产线节拍规划时序表。
9、优选地,s100步骤中,电机装配产线节拍规划的规划对象为最小单元的装配动作,规划参数有:动作i动作时间ti_cal、动作i开始时刻ti_start、动作i结束时刻ti_stop、动作i和动作j的顺序关系rij_cal;其中:若规划后动作i在动作j之前,则rij_cal为1;若规划后动作i在动作j之后,或动作i和动作j无顺序关系,则rij_cal为0。
10、优选地,s200步骤中,规划前的输入参数有:基于人工经验的每个装配动作所需时长ti_input、基于人工经验的动作i和动作j的顺序关系rij_input、动作i和装配工具k的关系值xki_tool、动作i和动作j之间的交互关系值aij_inter;根据输入参数执行如下矩阵构建步骤:
11、s210构建装配动作时间矩阵ti_input=[t1_input,t2_input,…,ti_input,…,tn_input],ti_input表示基于经验动作i所需时长,n为动作的总数目;
12、s220构建装配动作顺序关系矩阵rij_input,矩阵中的第i行第j列的数表示动作i与动作j的顺序关系;
13、s230构建装配动作与装配工具关系矩阵xki_tool,矩阵中第k行第i列的值表示动作i是否由工具k执行;
14、s240构建装配动作交互矩阵aij_input,矩阵中第i行第j列表示动作i和动作j之间的交互关系;
15、其中:若基于人工经验的动作i在动作j之前,则rij_input为1;若基于人工经验的动作i在动作j之后,或动作i和动作j无顺序关系,则rij_input为0;xik_tool表示动作i是否是由装配工具k完成,若基于人工经验的动作i由工具k执行,则xik_tool值为1,否则为0;aij_inter表示动作i和动作j是否具有动作交互,即动作i和动作j是否发生了零件在不同装配工具上的传递,若是,则aij_inter值为1,否则为0。
16、优选地,所述的先验知识变量包括装配动作时间矩阵ti_input、装配动作顺序关系矩阵rij_input、装配动作与装配工具关系矩阵xki_tool、装配动作交互矩阵aij_input。
17、优选地,s400步骤具体如下:在matlab中利用yalmip工具包和lpsolve求解器进行装配节拍规划求解,得到然后,人工判断求解后的结果是否符合实际装配情景,若不符合实际装配情景,则修改规划前的输入参数值,并更新先验知识变量,回到s300步骤继续执行,从而继续在matlab中利用yalmip工具包和lpsolve求解器进行装配节拍规划求解,直到符合实际装配情景,最后得到计算后的装配动作时间矩阵ti_cal、装配动作开始时刻矩阵ti_start、装配动作结束时刻矩阵ti_stop、装配动作顺序关系矩阵rij_cal,并输出电机装配产线节拍规划时序图。
18、优选地,利用yalmip工具包和lpsolve求解器求得时,采用基于混合整数线性规划的数学方法进行装配节拍规划寻优,寻优目标函数和约束条件数学表达式如下:
19、目标函数:即首先找到ti_stop中的最大值maxti_stop,然后对maxti_stop进行寻优规划,求得其最小值。
20、约束条件为:
21、ti_start≥0
22、ti_stop-ti_start≥ti_input
23、tj_start≥ti_stop-(1-rij_cal)×m,m为一个无穷大的实数
24、rij_cal∈{0,1}
25、rij_cal≥rij_input
26、
27、优选地,
28、ti_cal=[t1_cal,t2_cal,…,ti_cal,…,tn_cal]
29、ti_start=[t1_start,t2_start,…,ti_start,…,tn_start]
30、ti_stop=[t1_stop,t2_stop,…,ti_stop,…,tn_stop]
31、
32、本发明具有的有益效果是:
33、本发明主要应用于电机装配自动化产线在产线范围内生产节拍的整体解决方案,涉及装配资源和装配工具作业的时序规划。对于电机生产企业装配车间的资源调度及产线节拍规划,本发明依托于企业内部自主移动式机器人(自动驾驶车辆)的作业空间配置及其时序规划,依托于企业资源计划erp(enterprise resource planning)、制造执行系统mes(manufacturing execution system)等企业信息系统,可适用于任何电机装配产线场景,以最优化装配资源和装配效率,实现了高效高质量装配。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198972.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表