一种采用附加侧滑角在线快速迭代速度控制方法与流程
- 国知局
- 2024-07-31 23:54:54
本发明属于导弹,具体涉及一种采用附加侧滑角在线快速迭代速度控制方法。
背景技术:
1、高超声速飞行器的末速控制在实际飞行中至关重要,合适的末速能保证导引头正常抛罩、保证战斗部发挥增加性能、提高末制导精度。但考虑到飞行器的硬件成本,因此需要在不增加硬件成本的基础上,仅采用算法调整飞行器轨迹来实现速度的闭环控制。现有技术主要采用高度-理想速度曲面或者阻力-理想速度曲面的方法,属于开环的控制方法,控制精度不足,设计参数众多,不能满足快速发射和复杂任务需求,因此需要一种高精度的闭环速度控制方法。
技术实现思路
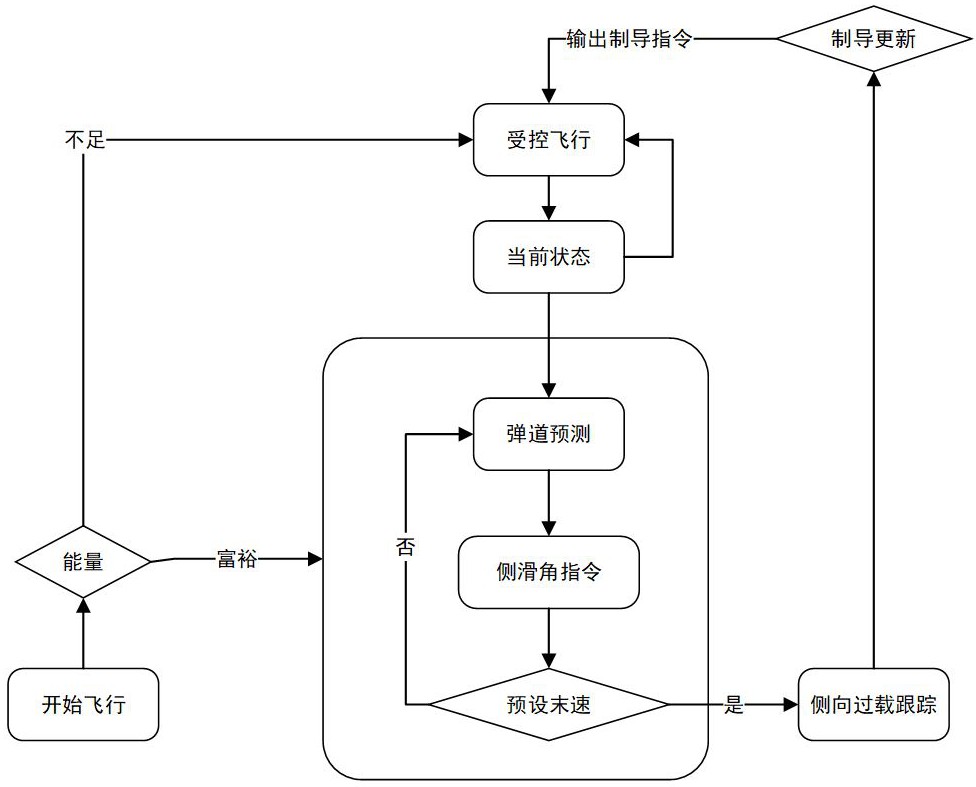
1、为了克服现有技术的不足,本发明提供了一种采用附加侧滑角在线快速迭代速度控制方法,首先采用变步长积分通过并行计算实现末速在线预测;其次利用高斯牛顿法计算附加侧滑角的幅值进行减速;然后设置速度追踪切换通道进行附加侧滑角方向切换;最后根据附加侧滑角输出量进行过载跟踪,实现侧向机动突防并进行减速。本发明方法作用时间长,计算精度高,减速的同时可增加突防概率,工程实践能力强。
2、本发明解决其技术问题所采用的技术方案如下:
3、步骤1:末速预测;
4、建立速度预测微分方程:
5、(1)
6、其中为结束预测时的对应射程,分别为导弹射程、导弹速度、导弹弹道倾角、弹道视线倾角、导弹气动阻力、重力加速度和当地弹道倾角;预测射程处的速度通过对(1)式积分获得:
7、(2)
8、其中为当前射程;
9、重力加速度与飞行高度有关:
10、
11、式中,为海平面引力加速度,为地球半径,为飞行高度;
12、气动阻力是导弹速度、大气密度、气动阻力系数的函数:
13、
14、式中,为大气密度,为参考截面积;为气动阻力系数,是马赫数以及合攻角相关的函数,由导弹气动外形决定;其中,为声速,与飞行高度相关;合攻角表示如下:
15、
16、其中为攻角,为侧滑角;
17、步骤2:需用侧滑角幅值迭代计算;
18、设剩余射程中的侧滑角有如下形式:
19、(3)
20、其中为末段侧滑角幅值;为当前侧滑角幅值;为标称射程;
21、重复步骤1中的积分运算式(2),根据高斯-牛顿迭代法多次迭代,产生当前侧滑角幅值,迭代计算公式如下所示:
22、(4)
23、其中为迭代常数因子;分别表示第k次迭代过程中的侧滑角和速度差,速度差,分别为第k次迭代过程中的预测速度和期望速度;表示第k+1次迭代过程中的侧滑角,表示第k-1次迭代过程中的侧滑角;为第k-1次迭代过程中的预测速度和期望速度的差值;
24、当速度差则结束迭代,为预设阈值;获得当前时刻需用侧滑角幅值的最终值,记为;
25、步骤3:需用侧向过载设计;
26、需用侧滑角最终由下式确定:
27、(5)
28、其中为符号函数,表示括号内数值的符号,为预设侧滑角幅值,用来描述减速通道大小;
29、侧向需用过载指令为:
30、(6)
31、其中为飞行器质量;为侧向力系数。
32、本发明的有益效果如下:
33、本发明方法已应用于国内某制导火箭的项目研制中,设计的预测校正方法保障了导弹中制导和末制导阶段的全程减速,并能随机换向,增加突防概率。本发明方法具有广阔的应用前景。
技术特征:1.一种采用附加侧滑角在线快速迭代速度控制方法,其特征在于,包括如下步骤:
技术总结本发明公开了一种采用附加侧滑角在线快速迭代速度控制方法,首先采用变步长积分通过并行计算实现末速在线预测;其次利用高斯牛顿法计算附加侧滑角的幅值进行减速;然后设置速度追踪切换通道进行附加侧滑角方向切换;最后根据附加侧滑角输出量进行过载跟踪,实现侧向机动突防并进行减速。本发明方法作用时间长,计算精度高,减速的同时可增加突防概率,工程实践能力强。技术研发人员:刘钧圣,高登巍,苗昊春,栗金平,邓海鹏,李琪,皇甫逸伦,常江,潘瑞,刘梦焱,裴培,张哲铭,李雅君,张梦典,王洋,李鹏受保护的技术使用者:西安现代控制技术研究所技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240730/199148.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表