一种无人巡更方法、系统及存储介质与流程
- 国知局
- 2024-07-31 23:55:14
本发明涉及机器人巡更,尤其涉及一种无人巡更方法、系统及存储介质。
背景技术:
1、现有的巡更主要由人工巡逻,具体的工作原理是:将巡更点安放在巡逻路线的关键点上,保安在巡逻的过程中用随身携带的巡更棒读取自己的人员点,然后按线路顺序读取巡更点,在读取巡更点的过程中,如发现突发事件可随时读取事件点,巡更棒将巡更点编号及读取时间保存为一条巡逻记录。定期用通讯座将巡更棒中的巡逻记录上传到计算机中。管理软件将事先设定的巡逻计划同实际的巡逻记录进行比较,就可得出巡逻漏检、误点等统计报表,通过这些报表可以真实的反映巡逻工作的实际完成情况。
2、随着机器人技术地不断发展,通过机器人按照预定的路径进行无人化巡更的方式已经出现,申请公布号为cn117608302a的中国专利公开了一种无人巡更方法、系统及存储介质;其原理是通过固定设置的监控装置初步判断三维地图中的异常点位置,再由巡检机器人按照异常点位置规划路径,对异常点进行巡检。
3、然而,若依靠一台巡检机器人对巡检区域的每个角落进行详细、完整地拍摄视频记录,则会耗费大量的存储空间,且巡检的效率大幅降低,若预定的巡检路线并不能完整覆盖整个巡检区域,若如以上专利方案所述,仅通过监控判断异常点,通过将异常点增加至巡检机器人的巡检路径中,从而根据巡检机器人当前的位置重新计算巡检路线,由于固定的监控装置的视角受限,无法完全覆盖并准确判断异常点,且不断重新计算巡检路线也会耗费算力和巡检时间;导致整体的巡检效率下降。
技术实现思路
1、本发明所要解决的技术问题是:提供一种无人巡更方法、系统及存储介质,既能避免监控死角遗漏的情况,又能准确、高效地对疑似异常位置进行高效、全面地巡更,记录完整地现场视频信息。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、一种无人巡更方法,包括以下步骤:
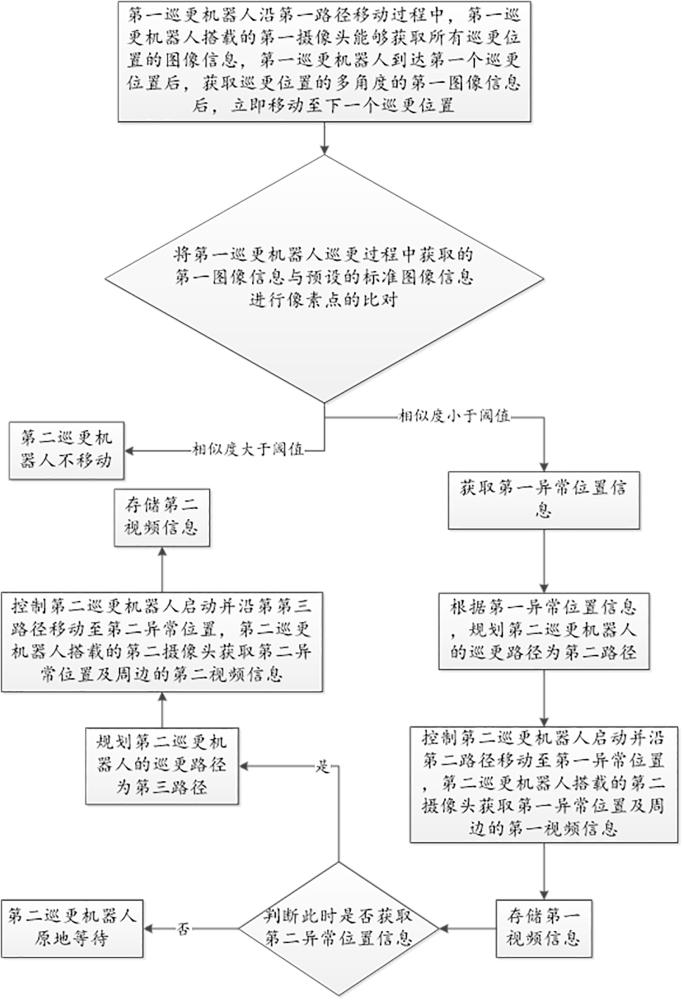
4、根据巡更区域的三维模型,规划第一巡更机器人的巡更路径为第一路径,所述第一路径为起始点途经所有巡更位置的最优路径,使第一巡更机器人沿第一路径移动过程中,第一巡更机器人搭载的第一摄像头能够获取所有巡更位置的图像信息,第一巡更机器人到达第一个巡更位置后,获取巡更位置的多角度的第一图像信息后,立即移动至下一个巡更位置;
5、将第一巡更机器人巡更过程中获取的第一图像信息与预设的标准图像信息进行像素点的比对,若相似度小于预设的阈值时,则获取第一异常位置信息;
6、根据第一异常位置信息,规划第二巡更机器人的巡更路径为第二路径,所述第二路径为起始点至第一异常位置的最短路径,控制第二巡更机器人启动并沿第二路径移动至第一异常位置,第二巡更机器人搭载的第二摄像头获取第一异常位置及周边的第一视频信息,存储第一视频信息;
7、当第二巡更机器人获取完成第一视频信息后,判断此时是否获取第二异常位置信息,若是,则规划第二巡更机器人的巡更路径为第三路径,所述第三路径为第一异常位置至第二异常位置的最短路径,控制第二巡更机器人启动并沿第三路径移动至第二异常位置,第二巡更机器人搭载的第二摄像头获取第二异常位置及周边的第二视频信息,存储第二视频信息;若否,则原地等待,直至出现第二异常位置信息。
8、进一步,上述无人巡更方法中,所述预设的标准图像信息为巡更位置在正常状态下拍摄的多组图像信息;
9、“将第一巡更机器人巡更过程中获取的第一图像信息与预设的标准图像信息进行像素点的比对,若相似度小于预设的阈值时,则获取第一异常位置信息”具体为:将第一巡更机器人巡更过程中获取的每个角度的第一图像信息分别与所有的第一位置预设的所有该角度的标准图像信息进行像素点比对,若所有比对结果的相似度均小于预设的阈值时,则获取第一异常位置信息。
10、进一步,上述无人巡更方法中,每个巡更位置设置有多个固定的巡更拍摄位点,所述第一巡更机器人在获取第一图像信息时,定位于各固定的拍摄位点进行拍摄。
11、进一步,上述无人巡更方法中,每个巡更位点的每个巡更拍摄位点的高度不同,每个拍摄位点与水平面之间设有用于第一巡更机器人移动的斜坡。
12、进一步,上述无人巡更方法中,若第一巡更机器人完成所有巡更位置的巡更后,未获取下一个异常位置,而第二巡更机器人处于异常位置原地等待状态,则控制第一巡更机器人和第二巡更机器人分别规划回到起始点的最优路径,第一巡更机器人和第二巡更机器人按照各自的最优路径回到起始点待命。
13、进一步,上述无人巡更方法中,还包括预设第一巡更机器人的自动巡更的时间点,使到达预设时间点时,第一巡更机器人自动启动巡更。
14、本发明还保护上述无人巡更方法的巡更系统,包括:
15、第一路径规划模块,用于规划第一巡更机器人的巡更路径为第一路径;
16、第一巡更机器人搭载的第一摄像头,用于获取所有巡更位置的图像信息;
17、比对计算模块,用于将第一摄像头获取的图像信息与预设的标准图像信息进行像素点比对,若相似度小于预设的阈值时,则获取第一异常位置信息;
18、第二路径规划模块,用于规划第二巡更机器人的巡更路径为第二路径;
19、第二巡更机器人搭载的第二摄像头,用于获取异常位置及周边的视频信息;
20、存储模块,用于存储视频信息。
21、本发明还保护上述无人巡更方法的巡更设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人巡更程序,所述无人巡更程序配制为实现上述无人巡更方法的步骤。
22、本发明还保护一种存储介质,所述存储介质上存储有无人巡更程序,所述无人巡更程序被处理器执行时实现上述无人巡更方法的步骤。
23、本发明的有益效果在于:通过利用第一巡更机器人按照规划的路线对所有需要巡更的位置获取多角度的图像信息,与正常状态的标准图像进行比对,若比对结果差异大,判断该位置为异常位置时,针对性地规划第二巡更机器人到该位点进行详细地视频记录,即第一巡更机器人作为所有巡更位点是否存在异常的判断,第二巡更机器人则针对性地对异常位置进行完整记录。通过两台巡更机器人协同配合,对巡更区域进行高效巡更,并能够高效、完整地存储异常位置的详细视频信息。
技术特征:1.一种无人巡更方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人巡更方法,其特征在于,所述预设的标准图像信息为巡更位置在正常状态下拍摄的多组图像信息;
3.根据权利要求1所述的无人巡更方法,其特征在于,每个巡更位置设置有多个固定的巡更拍摄位点,所述第一巡更机器人在获取第一图像信息时,定位于各固定的拍摄位点进行拍摄。
4.根据权利要求3所述的无人巡更方法,其特征在于,每个巡更位点的每个巡更拍摄位点的高度不同,每个拍摄位点与水平面之间设有用于第一巡更机器人移动的斜坡。
5.根据权利要求1所述的无人巡更方法,其特征在于,若第一巡更机器人完成所有巡更位置的巡更后,未获取下一个异常位置,而第二巡更机器人处于异常位置原地等待状态,则控制第一巡更机器人和第二巡更机器人分别规划回到起始点的最优路径,第一巡更机器人和第二巡更机器人按照各自的最优路径回到起始点待命。
6.根据权利要求1所述的无人巡更方法,其特征在于,还包括预设第一巡更机器人的自动巡更的时间点,使到达预设时间点时,第一巡更机器人自动启动巡更。
7.根据权利要求1-6任一项所述的无人巡更方法的巡更系统,其特征在于,包括:
8.根据权利要求1至6任一项所述的无人巡更方法的巡更设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的无人巡更程序,所述无人巡更程序配制为实现如权利要求1-6任一项所述的无人巡更方法的步骤。
9.一种存储介质,其特征在于,所述存储介质上存储有无人巡更程序,所述无人巡更程序被处理器执行时实现如权利要求1-6任一项所述的无人巡更方法的步骤。
技术总结本发明涉及机器人巡更技术领域,尤其涉及一种无人巡更方法、系统及存储介质;通过利用第一巡更机器人按照规划的路线对所有需要巡更的位置获取多角度的图像信息,与正常状态的标准图像进行比对,若比对结果差异大,判断该位置为异常位置时,针对性地规划第二巡更机器人到该位点进行详细地视频记录,即第一巡更机器人作为所有巡更位点是否存在异常的判断,第二巡更机器人则针对性地对异常位置进行完整记录。通过两台巡更机器人协同配合,对巡更区域进行高效巡更,并能够高效、完整地存储异常位置的详细视频信息。技术研发人员:盛伟兵,黄林红,黄小波,谢亚男,盛忠平,江武斌受保护的技术使用者:福建迈威信息工程有限公司技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240730/199171.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表