一种ROV双位双控驾驶操作装置及方法
- 国知局
- 2024-07-31 23:56:51
本发明涉及rov驾驶操作,具体涉及一种rov双位双控驾驶操作装置及方法。
背景技术:
1、随着人类对海洋油气勘探开发和深海资源调查的不断深入以及各类水下机器人装备的不断开发与应用,有缆遥控水下机器人(rov)因其具有水面实时遥控驾驶、活动范围广、电源充足、负载量大等自身特点,以及能够在水下完成观察、抓取、布放、打捞和施工等作业,在海洋油气勘探开发和深海资源调查开发中得到了广泛的应用,其开发技术受到了各国的极大重视。
2、目前,传统的rov多采用单操控面板和单控制计算机完成状态监视和驾驶作业,随着rov的应用与发展,暴露出了以下问题:一、单人操作驾驶时手忙脚乱,主驾驶人员易因紧张而操作出错,二、辅助操作驾驶人员不能均摊操作驾驶强度,主驾驶人员易因疲劳而操作出错;三、单操控面板和单控制计算机一旦出现问题或故障,整个rov的运行易瘫痪,轻则影响了海底作业任务的完成,重则可能导致rov丢失。而一种采用双驾驶人员、双驾驶操作面板、双控制计算机的冗余驾驶与控制架构则可以很好的克服上述问题。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种满足基于双驾驶人员、双驾驶操作面板和双控制计算机的互为备用、互相协同的rov驾驶操作装置及方法。该驾驶操作装置和方法具有较好的冗余度、可减少紧张度和疲劳驾驶、操作数量易于扩展和修改、控制方法简单易行等特点,大大提升了rov驾驶的体验性和运行的可靠性、安全性。
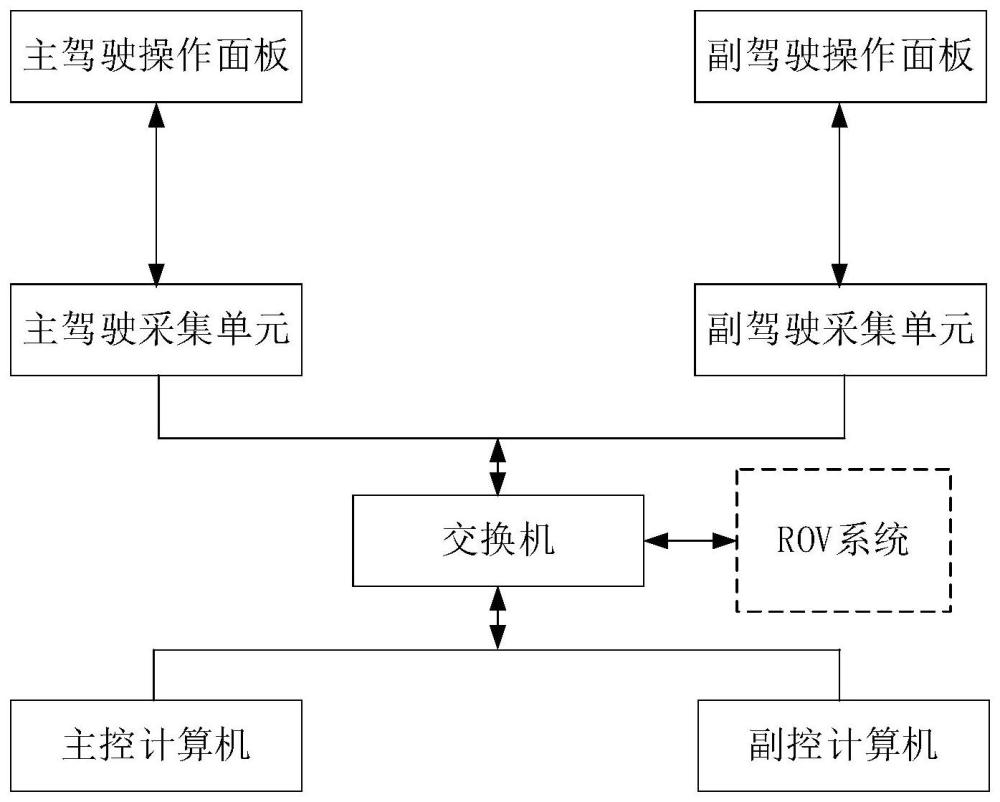
2、本发明为实现上述目的所采用的技术方案是:一种rov双位双控驾驶操作装置,包括:主驾驶操作面板、副驾驶操作面板、主驾驶采集单元、副驾驶采集单元、主控计算机、副控计算机以及交换机;
3、所述主驾驶操作面板、副驾驶操作面板均安装在水面控制台台面上;所述主控计算机和副控计算机分别嵌入到对应主驾驶操作面板上和副驾驶操作面板上;
4、所述主驾驶采集单元、副驾驶采集单元和交换机安装在水面控制台内部;
5、所述主驾驶采集单元通过信号线和主驾驶操作面板连接;所述副驾驶采集单元通过信号线和副驾驶操作面板连接;
6、所述主驾驶采集单元,接收主控计算机或副控计算机的请求指令,采集主驾驶操作面板的物理操作信息,并发送给主控计算机或副控计算机;
7、所述副驾驶采集单元,接收主控计算机或副控计算机的请求指令,采集副驾驶操作面板的物理操作信息,并发送给主控计算机或副控计算机;
8、所述交换机通过网线分别与主驾驶采集单元、副驾驶采集单元、主控计算机、副控计算机以及rov系统连接。
9、所述主驾驶操作面板和副驾驶操作面板均包括:设置于面板主体上的运动调节旋钮区、触摸屏以及运动操纵遥杆;
10、所述触摸屏嵌设于面板主体中心处,所述运动调节旋钮区和运动操纵遥杆均设于触摸屏左右两侧;
11、所述运动调节旋钮区和运动操纵遥杆均与对应的主驾驶采集单元或副驾驶采集单元连接,用于发送rov运动的物理操作状态信息至主控计算机或副控计算机。
12、所述主控计算机和副控计算机均为集成触摸屏的一体式控制计算机;
13、所述主控计算机和副控计算机的触摸屏上设有数字操作面板,通过数字操作面板上的数字操作,用于发出除主驾驶操作面板或副驾驶操作面板物理操作外的操作至rov系统;
14、所述主控计算机和副控计算机的主数字操作面板上均设有处理权限开关,用于设定采用主控计算机或副控计算机来处理所有操作信息和向rov系统输出操作指令;
15、不具有处理和输出操作指令权限的控制计算机采集自身的触摸屏内的数字操作,发送至具有处理和输出指令权限的控制计算机;
16、所述主控计算机和副控计算机的主数字操作面板上均设有面板选择开关,用于选择采用主驾驶操作面板上或副驾驶操作面板上的物理操作来遥控rov运动;
17、未被选择为用来遥控rov运动的驾驶操作面板上的物理操作,反馈至具有处理和输出指令权限的控制计算机。
18、一种rov双位双控驾驶操作方法,包括以下步骤:
19、步骤1:主控计算机和副控计算机分别判断是否具有处理和输出指令的权限,具有处理和输出指令权限的控制计算机进入主循环,执行步骤2;不具有处理和输出指令权限的另一台控制计算机,则进入副循环;
20、步骤2:具有处理和输出指令权限的控制计算机向主驾驶采集单元和副驾驶采集单元发出请求物理操作状态的指令,进入步骤3;
21、步骤3:具有处理和输出指令权限的控制计算机分别接收主驾驶采集单元和副驾驶采集单元反馈的主驾驶操作面板和副驾驶操作面板的物理操作状态信息;
22、步骤4:具有处理和输出指令权限的控制计算机选择采用主驾驶操作面板上的rov运动物理操作或副驾驶操作面板上的rov运动物理操作;
23、步骤5:具有处理和输出指令权限的主控计算机或副控计算机采集自身触摸屏上多个数字操作面板上的rov数字操作,同时接收不具有处理和输出指令权限的另一控制计算机发送的触摸屏上的rov数字操作;
24、步骤6:具有处理和输出指令权限的控制计算机根据采集到的两个控制计算机上的rov数字操作并结合主驾驶采集单元和副驾驶采集单元反馈的主驾驶操作面板和副驾驶操作面板的物理操作状态信息,获取最终的rov操作指令;
25、步骤7:具有处理和输出指令权限的控制计算机向不具有处理和输出指令权限的控制计算机发送操作同步信息;
26、步骤8:具有处理和输出指令权限的控制计算机将最终的rov操作指令输出给rov系统,对rov进行驾驶,返回步骤1。
27、所述步骤1中,主控计算机和副控计算机分别判断是否具有处理和输出指令的权限,具体为:
28、根据主控计算机和副控计算机的主数字操作面板上均设有的处理权限开关指示状态,来设定主控计算机或副控计算机具有权限来处理所有操作信息和向rov系统输出操作指令,另一台控制计算机则不具有处理操作和输出操作指令的权限。
29、所述步骤4)中,具有处理和输出指令权限的控制计算机选择采用主驾驶操作面板上的rov运动物理操作或副驾驶操作面板上的rov运动物理操作,具体为:
30、根据主控计算机和副控计算机的主数字操作面板上均设有的面板选择开关指示状态,来选择采用主驾驶操作面板上或副驾驶操作面板上的物理操作来遥控rov运动,未被选中的驾驶操作面板上的物理操作将被具有处理和输出指令权限的控制计算机所忽略。
31、所述副循环,具体为:
32、(1)不具有处理和输出指令权限的控制计算机接收来自另一台具有处理和输出指令权限的控制计算机的操作同步信息后,进行数字操作面板状态同步,以使两个控制计算机的操作状态指示一致;
33、(2)不具有处理和输出指令权限的控制计算机采集自身触摸屏上数字操控面板界面上的数字操作,并将其发送给具有处理和输出指令权限的控制计算机,然后,不具有处理和输出指令权限的控制计算机重新判断自身是否具有处理和输出指令的权限。
34、当具有处理和输出指令权限的控制计算机故障时,另一个控制计算机立即激活处理与输出指令权限,继续rov的操作驾驶。
35、当面板选择开关选中的驾驶操作面板上的物理操作异常导致rov运动失常时,另一个驾驶操作面板立即切入,恢复rov的运动驾驶。
36、本发明具有以下有益效果及优点:
37、1.本发明的rov双位双控驾驶操作装置及方法,采用相同的主驾驶操作面板和副驾驶操作面板,互为备用,一个失效,另一个还能完成rov的全部驾驶;
38、2.本发明的rov双位双控驾驶操作装置及方法,采用双驾驶人员协同完成rov的驾驶,将有助于降低驾驶紧张度和疲劳感,减少误驾驶出现的次数;
39、3.本发明的rov双位双控驾驶操作装置及方法,采用双控制计算机,互为备用,一个出现故障,另一个瞬间接手控制权,提高了rov的可靠性和安全性。
40、4.本发明的rov双位双控驾驶操作装置及方法,采用基于触摸屏的数字操控面板,易于扩展和修改。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199332.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。