一种基于半实物仿真技术的汽车倒车控制系统和方法
- 国知局
- 2024-08-01 00:00:01
本发明涉及汽车倒车相关,具体为一种基于半实物仿真技术的汽车倒车控制系统和方法。
背景技术:
1、随着中国汽车保有量的急剧增加,道路、停车场等泊车场所日益拥挤,可以利用的泊车空间也越来越少,与此同时,快速增长的驾驶员人群中操纵不熟练的新手也逐年增多,由于汽车结构和驾驶员视野局限的影响,倒车成为汽车驾驶的主要难点之一,美国密歇根大学的研究表明,泊车导致的事故占到各类事故的44%,其中大约50%的泊车事故是由于倒车造成的,由此可见,倒车是导致车辆事故的一个重要原因,针对上述状况,各种类型的倒车辅助系统得以广泛应用,在汽车投入使用之前需要对其进行多方面性能测试,其中汽车倒车控制算法在汽车测试中显得尤为重要,但现有的大部分装置还存在一些缺陷,本发明提出一种新的方案用以解决其中的不足之处。
2、中国授权公告号为cn107364491b中,公开了一种车辆自动倒车系统及其控制方法,涉及车辆辅助系统技术领域。本发明的自动倒车系统,包括声波信号发生器、声波信号接收器和车辆中央控制单元,声波信号发生器以特定频率发出声波信号,包括安装在车位后方的两个限位桩正中间的第一声波信号发生器和车位前方正中间地板上的第二声波信号发生器,声波信号接收器探测所述声波信号发生器发出的所述声波信号,包括依次设置在所述车辆的左前、左后、右前和右后轮辋中心的第一至第四声波信号接收器,车辆中央控制单元根据所述声波信号接收器探测到所述声波信号进行定位并实时修正倒车路线。本发明还提供了相应的控制方法,本发明能够自动倒车,方便快捷,避免倒车过程中发生剐蹭事件。
3、中国授权公告号为cn113053121b中,公开了一种安全管理的技术领域,揭露了一种汽车电子控制单元的安全算法管理方法,包括:获取汽车的电池信息数据,并对电池信息数据进行数据预处理,得到预处理后的电池信息数据;根据预处理完成的电池信息数据,利用基于坐标转换的传感器检测算法进行汽车电流传感器数据的实时安全检测,若检测到安全问题,则进行安全警告;利用基于注意力的目标检测算法进行前方目标车辆检测,得到车辆目标检测结果;利用目标融合算法将车辆目标检测结果同车辆传感器检测得到的目标检测信息进行目标融合;根据目标融合特征,利用车辆防碰撞预警算法进行汽车安全预警。本发明还提供了一种汽车电子控制单元的安全算法管理系统,本发明实现了汽车的安全管理。
4、中国授权公告号为cn102745138b中,公开了一种双视场动态轨迹倒车影像系统,其特征在于:它包括广角倒车摄像头,方向盘转角传感器,倒车影像控制系统和显示器,倒车影像控制系统获取汽车档位、方向盘转角和驾驶员倒车影像视场选择信息;倒车影像控制系统控制广角倒车摄像头获取车辆后方图像并将其分别发送到倒车轨迹投影单元和倒车影像俯视变换单元,倒车轨迹计算单元采集方向盘转角计算倒车轨迹和距离标记线,并将其发送到倒车轨迹投影单元;倒车轨迹投影单元将倒车轨迹线和距离标记线投影至图像中,并将叠加有倒车轨迹线和距离标记线的图像发送到显示器;倒车影像俯视变换单元车辆后方图像变换为俯视图像,同时将倒车轨迹和距离标记线投影至俯视图像中,并将其发送到显示器。本发明可以广泛应用于汽车倒车过程中为驾驶员提供更准确的参考信息。
5、上述的现有技术方案存在以下缺陷:需要建立大量的汽车倒车模型,不便于模拟汽车倒车实际过程中突发的情况,影响测试范围,且实用效果不佳,因此我们提出一种基于半实物仿真技术的汽车倒车控制系统和方法,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种基于半实物仿真技术的汽车倒车控制系统和方法,以解决上述背景技术中提出的需要建立大量的汽车倒车模型,不便于模拟汽车倒车实际过程中突发的情况,影响测试范围,且实用效果不佳的问题。
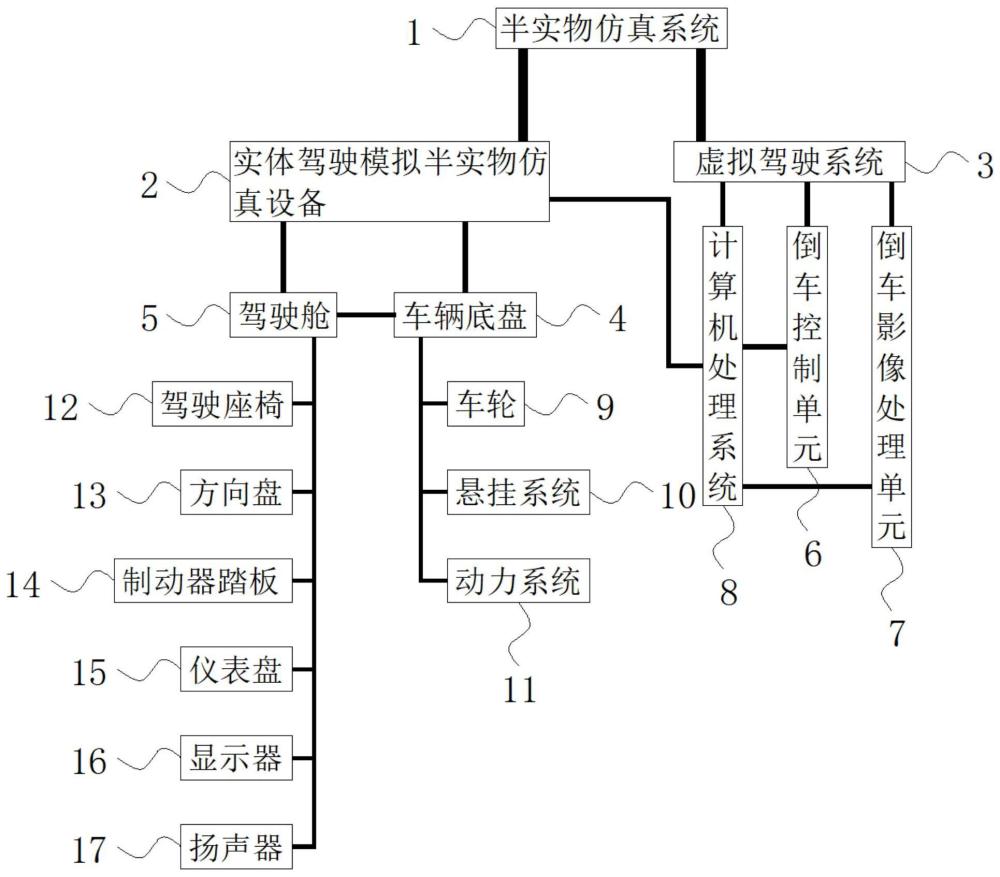
2、为实现上述目的,本发明提供如下技术方案:一种基于半实物仿真技术的汽车倒车控制系统和方法,包括半实物仿真系统,所述半实物仿真系统包括有实体驾驶模拟半实物仿真设备和虚拟驾驶系统。
3、在一种可能的实现方式中,所述实体驾驶模拟半实物仿真设备包括车辆底盘和驾驶舱。
4、在一种可能的实现方式中,所述虚拟驾驶系统包括倒车控制单元、倒车影像处理单元和计算机处理系统。
5、在一种可能的实现方式中,所述倒车控制单元和倒车影像处理单元均与计算机处理系统相连接,且计算机处理系统与实体驾驶模拟半实物仿真设备相连接。
6、在一种可能的实现方式中,所述车辆底盘包括车轮、悬挂系统和动力系统,且车辆底盘与驾驶舱相连接,并且驾驶舱包括驾驶座椅、方向盘、制动器踏板和仪表盘,而且驾驶舱还包括显示器和扬声器。
7、在一种可能的实现方式中,所述计算机处理系统用于控制和运行整个汽车倒车半实物仿真系统,且计算机处理系统与实体驾驶模拟半实物仿真设备、倒车控制单元和倒车影像处理单元,进行数据交互和通信连接,能够处理大量的仿真数据和实时图像,为试验员提供真实的倒车体验和可视化反馈。
8、在一种可能的实现方式中,所述倒车影像处理单元与实体驾驶模拟半实物仿真设备相连接,并负责接受来自倒车影像传感器的倒车图像数据,且倒车影像处理单元能够实时处理倒车图像。
9、在一种可能的实现方式中,所述倒车影像处理单元将倒车轨迹线和距离标记线投影至图像中,并将叠加有倒车轨迹线和距离标记线的图像,发送到显示器,试验员可以通过倒车影像模拟获得清晰的倒车场景,辅助进行精确倒车操作。
10、在一种可能的实现方式中,所述倒车控制单元提前用matlab输入模拟的各种情形下的汽车倒车信息指令,同时结合试验员对倒车影像处理单元做出判断,传输到计算机处理系统进行分析和处理,最终根据预设的算法和控制策略发送控制指令给车辆,确保车辆在倒车过程中的稳定性和安全性,实现精确的倒车控制。
11、在一种可能的实现方式中,所述其控制方法包括如下步骤:
12、步骤1、让试验员进入驾驶舱内并坐在驾驶座椅上,手把持着方向盘,左脚踩踏在制动器踏板上,通过连接虚拟驾驶系统输入动力系统,对车辆进行驱动和倒车操作;
13、步骤2、可以通过查看仪表盘监测行驶速度,此时车辆底盘下设置的车轮转动,并通过悬挂系统带来减震效果,避免试验员出现晃动恶心的问题;
14、步骤3、扬声器伴随着倒车雷达进行警示部分,利用倒车控制单元和倒车影像处理单元对画面进行俯视和侧视等角度进行算法处理,能够较准确地识别障碍物、距离以及车辆位置等关键信息,并将其显示在驾驶舱的显示器上;
15、步骤4、最后结束倒车操作,将数据通过计算机处理系统反馈至半实物仿真系统内,实现精确的倒车控制。
16、与现有技术相比,本发明的有益效果是:该基于半实物仿真技术的汽车倒车控制系统和方法,能够实时分析和处理倒车场景,并根据预设的算法和控制策略发送控制指令给车辆,它确保车辆在倒车过程中的稳定性和安全性,实现精确的倒车控制无需建立大量的汽车倒车模型,且能模拟汽车倒车实际过程的多类突发情况,测试范围广且效果好;
17、1、通过实体驾驶模拟半实物仿真设备由车辆底盘和驾驶舱组成,以便于提供动力系统能够模拟真实车辆的倒车特性,通过倒车控制单元和倒车影像处理单元均与实体驾驶模拟半实物仿真设备相连接,能够负责接收来自传单器的倒车信息和根据用户对倒车影像的判断所作出的指令,实时分析和处理倒车场景,并根据预设的算法和控制策略发送控制指令给车辆,确保车辆在倒车过程中的稳定性和安全性,实现精确的倒车控制,本发明无需建立大量的汽车倒车模型,且能模拟汽车倒车实际过程的多类突发情况,测试范围广且效果好。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199456.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
控制装置以及方法与流程
下一篇
返回列表