基于天鹰优化PID控制汽车单轮防抱死系统制动方法与流程
- 国知局
- 2024-08-01 00:06:14
本发明涉及pid控制汽车防抱死制动,具体涉及一种基于rldeao(基于差分进化的反向学习结合停止扰动的天鹰搜索算法)优化pid控制汽车单轮防抱死系统制动方法。
背景技术:
1、在汽车制动系统中,防抱死系统(anti-lock braking system,简称abs)是一项关键技术,旨在提高车辆在制动时的稳定性和操控性。abs通过实时监测车轮的速度,防止车轮抱死,从而保持车辆的方向稳定性和制动效能。传统的pid控制器常用于abs系统,但其参数调优一直是一个挑战。引入群智能算法,这是一种启发式算法,用于自适应地调整pid控制器的参数。与传统的参数调优方法相比,群智能算法具有全局搜索和高度并行的特性,能够更有效地搜索参数空间,提高控制器性能。目前商业化使用的abs系统主要采用逻辑门限控制算法。然而,这种方法并不能直接以滑移率为控制目标,因此无法实现更好的控制性能。为了改进abs系统的控制策略,许多学者进行了研究。其中,一些学者如vimalra等以理想滑移率值作为输入量,验证了pid控制器在防抱死制动系统中的有效性。rongxu zhang等则采用pid控制算法和遗传优化pid控制算法对车辆稳定控制系统进行了仿真研究,结果表明遗传优化pid算法具有更好的控制效果。天鹰优化算法(aquila optimizer,ao)是由是2021年由laith abualigah等提出的一种新型群体智能算法,它通过模拟天鹰在捕捉猎物过程中的自然行为来进行寻优。该算法具有寻优能力强、快速收敛等特点,非常适合用于优化pid控制参数。但ao在寻优过程中容易陷入局部最优,需进一步改进。
技术实现思路
1、本发明的目的在于提供一种基于天鹰优化pid控制汽车单轮防抱死系统制动方法,以解决pid控制器的参数需要试凑法或经验法得到的问题,以及现有天鹰搜索算法,易陷入局部最优等缺陷,本发明在面对不同路况条件下时具有更好的防抱死制动效果,也可自适应地调整pid控制器的参数,以适应不同的路面情况。
2、为达到上述目的,本发明采用如下技术方案:
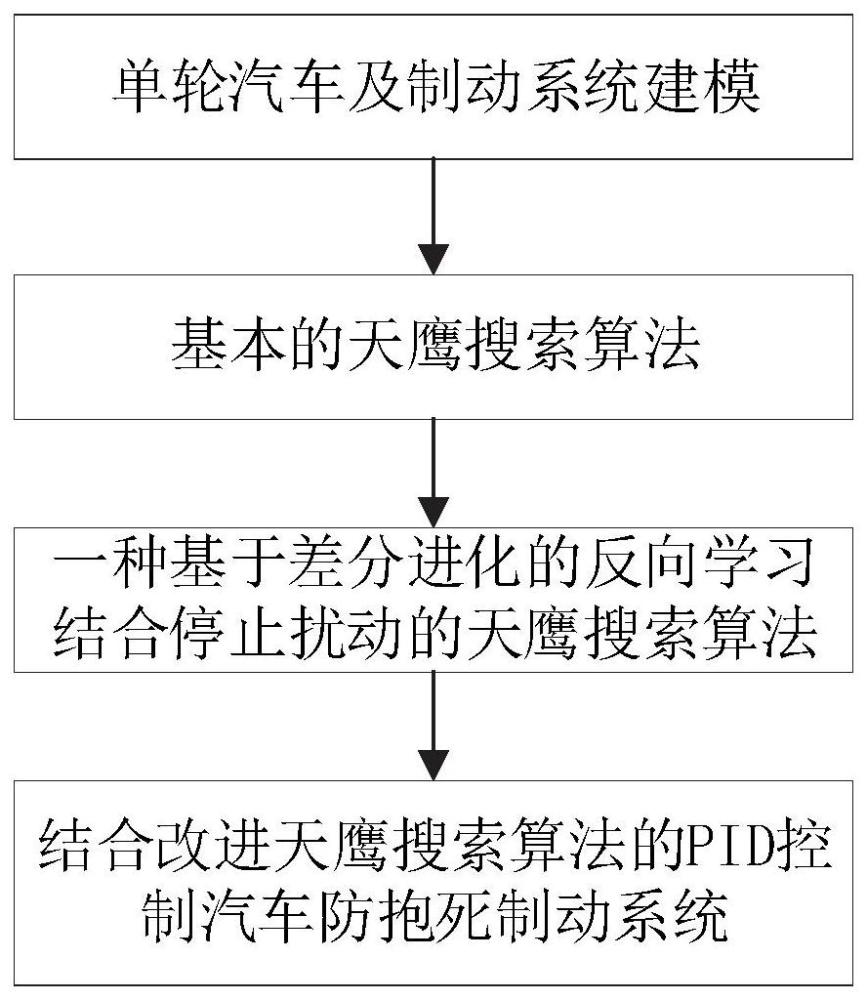
3、基于天鹰优化pid控制汽车单轮防抱死系统制动方法,包括以下步骤:
4、步骤1:建立汽车单轮模型及abs制动系统模型;
5、步骤2:获取天鹰搜索算法;
6、步骤3:根据汽车在不同路况下制动时防抱死控制对步骤2中获得的天鹰搜索算法进行改进,得到改进的天鹰搜索算法,并计算天鹰适应度值;
7、步骤4:根据步骤3改进的天鹰搜索算法,迭代处理后选出最优适应度,并将其对应的最佳位置坐标赋值给pid中的比例系数kp、积分系数ki及微分系数kd;
8、步骤5:根据步骤4获得的改进天鹰算法优化后的pid参数,将三个参数写入到pid控制器中,并应用于步骤1所建立的abs制动系统模型中,结合步骤1建立的汽车单轮模型,模拟汽车单轮防抱死系统制动。
9、进一步地,步骤1中建立汽车单轮模型,具体如下:
10、
11、
12、fx=usmg
13、式中,m是整车四分之一重量,fx表示纵向轮胎力,是车辆速度,us是车与地面的路面附着系数,r为轮胎半径,i为车轮转动惯量,为车轮角速度;
14、建立abs制动系统模型,公式具体如下:
15、
16、tb=kqq
17、其中,g(s)为传递函数,s为g(s)的自变量,z为电磁阀的响应时间,k为比例系数,tb为制动转矩,q为制动压力,kq为制动器的制动因子。
18、进一步地,步骤2中天鹰搜索算法包括以下步骤:
19、步骤2.1:随机初始化天鹰种群;
20、步骤2.2:扩大搜索阶段位置更新;
21、步骤2.3:缩小搜索阶段位置更新;
22、步骤2.4:扩大开发阶段位置更新;
23、步骤2.5:缩小开发阶段位置更新。
24、进一步地,步骤2.2中天鹰从地面上升探索附近猎物,当找到猎物时进入滑翔过程,进一步收起翅膀,提升速度,扩大搜索区域阶段位置更新如下:
25、
26、
27、式中,x1(t+1)为天鹰在步骤2.2位置更新时第t+1次迭代的解,xbest(t)是第t次迭代得到的最佳解,表示当时猎物的大概位置,t为最大迭代次数,(1-t/t)用于控制天鹰搜索,xm(t)是第t次迭代时当前解的平均位置,rand为[0,1]之间的一个随机数,n表示天鹰种群的规模,i表示当前个体数,j表示当前维度数,dim表示优化变量的维度;
28、步骤2.3中天鹰发现猎物后,开始围绕猎物抓捕,选择时机攻击,在这个过程中,天鹰逐渐缩小搜索猎物范围,并发动进攻,缩小探索区域阶段位置更新如下:
29、x2(t+1)=xbest(t)×levy(d)+xr(t)+(y-x)×rand
30、
31、式中,x2(t+1)为天鹰在步骤2.3位置更新时第t+1次迭代的解;d为维度大小;levy(d)为莱维飞行函数,xr(t)是第i次迭代时[1,n]上的一个随机解;β和c为常数;u是0到1之间的一个随机数;y和x表示搜索区域的形状;
32、步骤2.4中天鹰准备降落并发动攻击,这个过程中天鹰会根据目标选定区域对猎物进行抓捕,扩大开发区域阶段位置更新如下:
33、x3(t+1)=(xbest(t)-xm(t))×α-rand
34、+((ub-lb)×rand+lb)×δ
35、式中,x3(t+1)为天鹰在步骤2.4位置更新时第t+1次迭代的解,α和δ是(0,1)范围内的开采调节参数,ub和lb代表天鹰所在搜索空间的上限值和下限值;
36、步骤2.5中天鹰会根据猎物的随机移动在陆地上行走并进行攻击,缩小开发区域阶段位置更新如下:
37、x4(t+1)=qf·xbest(t)-(g1×x(t)×rand)
38、-g2×levy(d)+rand×g1
39、
40、式中,x4(t+1)为天鹰在步骤2.5位置更新时第t+1次迭代的解,qf为平衡搜索策略的质量函数,qf(t)表明第t次迭代时的质量函数值,g1为[-1,1]内的均匀随机数,g2表示天鹰的飞行斜率,其呈现从2到0的递减值。
41、进一步地,步骤3中对天鹰搜索算法进行改进,得到改进的天鹰搜索算法,具体包括以下步骤:
42、步骤4.1:随机初始化天鹰种群,天鹰的三维坐标当作pid的kp、ki、kd三个参数;
43、步骤4.2:采用生物进化策略使得天鹰种群进化,淘汰较差个体;
44、步骤4.3:开始迭代更新;
45、步骤4.4:结合自适应逐维小孔成像反向学习策略,修订扩大搜索阶段位置更新公式;
46、步骤4.5:利用停滞扰动结合莱维飞行策略,修订天鹰的缩小搜索和缩小开发阶段的位置更新公式,提高种群多样性;
47、步骤4.6:计算天鹰种群的适应度,根据适应度的大小选出最优天鹰;
48、步骤4.7:判断是否达到最大迭代次数,若是,输出最优天鹰位置坐标及适应度,若否,返回步骤4.2。
49、进一步地,步骤4.1中随机初始化天鹰种群,公式如下:
50、
51、xij=rand×(ubj-lbj)+lbj
52、i=1,2,……,n j=1,2,……,dim
53、式中,xi是第i个解的位置,ubj表示第j维的上界,lbj表示第j维的下界。
54、进一步地,步骤4.2中生物进化策略的具体步骤如下:
55、采用差分策略对个体进行遗传变异,变异向量产生公式如下:
56、vi=xr1+f(xr2-xr3)
57、式中r1,r2,r3是随机整数且r1≠r2≠r3,f是缩放因子,xr1,xr2,xr3为随机选择的从优到劣排序后的三个个体,vi为目标个体xi对应的变异个体;
58、对个体进行交叉,不断交叉产生一个交叉种群,交叉方法为:
59、
60、其中,vij为第j维的第i个变异个体,xij为第j维的第i个目标个体,uij为交叉后选择的第j维第i个个体,cr为是交叉概率,randi(1,d)表示在(1,d)内的一个随机数;
61、采用贪婪原则在原始种群和交叉种群中选择更优秀的作为下一代个体,方法如下:
62、
63、其中,xi为第i个目标个体,ui为第i个交叉后选择的个体,fit(x)为x的适应度。
64、进一步地,步骤4.4中结合自适应逐维小孔成像反向学习策略,修订扩大搜索阶段位置更新公式,具体为:
65、
66、
67、式中,aj和bj分别是第j维的上界和下界,n为调节参数,x’best(t)是第t次迭代得到的最佳解,表示当时猎物的大概位置,t为最大迭代次数,(1-t/t)用于控制天鹰搜索,xm(t)是第t次迭代时当前解的平均位置。
68、进一步地,步骤4.5利用停滞扰动结合莱维飞行策略,修订天鹰的缩小搜索和缩小开发阶段的位置更新公式,具体为:
69、x′2(t+1)=xbest(t)×levy(d)+xr(t)
70、+(y-x)×rand
71、x2(t+1)=xbest(t)+randn·levy(d)
72、+randn·|xbest(t)-x′2(t+1)|
73、x′4(t+1)=qf·xbest(t)-(g1×x(t)×rand)
74、-g2×levy(d)+rand×g1
75、x4(t+1)=xbest(t)+randn·levy(d)
76、+randn·|xbest(t)-x′4(t+1)|
77、式中,x2’(t+1)是天鹰缩小探索阶段时第t+1次迭代的解,x2(t+1)是采用停滞扰动结合莱维飞行策略优化后的第t+1次迭代的解,d为维度大小;levy(d)为莱维飞行函数,xr(t)是第i次迭代时[1,n]上的一个随机解,x4’(t+1)是天鹰在缩小开发捕猎时第t+1次迭代的解,x4(t+1)是采用停滞扰动结合levy飞行策略优化后的第t+1次迭代的解,qf为平衡搜索策略的质量函数,qf(t)表明第t次迭代时的质量函数值,g1表示天鹰在捕食时采取的不同方法,g2表示天鹰的飞行斜率,其呈现从2到0的递减值。
78、进一步地,根据步骤4.7中得到天鹰最佳位置坐标,将坐标参数赋值给pid中的比例系数kp、积分系数ki及微分系数kd,具体方式为:
79、天鹰种群有四种捕猎过程,每个过程都会进行位置更新,通过计算天鹰个体的适应度值,选取最小适应度值对应的天鹰个体位置坐标,然后进行迭代更新,在迭代过程中,若存在更小适应度值则替换天鹰个体的位置坐标,天鹰种群迭代完成后,将最优个体的三维位置坐标赋值给pid中的比例系数kp、积分系数ki及微分系数kd。
80、与现有技术相比,本发明具有以下有益的技术效果:
81、本发明提出了一种基于差分进化的反向学习结合停止扰动的天鹰搜索算法,在保证快速寻优的前提下,获得最优pid控制参数,本发明在面对不同路况时使汽车具有更好的制动效果。
82、进一步地,本发明在扩大搜索阶段采用自适应逐维小孔成像反向学习策略,解决了ao在选择搜索空间阶段过早收敛,易陷入局部极值点的情况;在缩小搜索和缩小开发阶段采用停滞扰动结合莱维飞行策略,提高了种群的多样性。
83、本发明相比于天鹰搜索算法,收敛速度更快,汽车制动距离更短,制动时间更快,滑移率曲线更快收敛到期望值。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199687.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表