基于反馈线性化的欠驱动列车滑模控制方法及相关装置
- 国知局
- 2024-08-01 00:13:14
本发明涉及高速列车控制,特别是涉及一种基于反馈线性化的欠驱动列车滑模控制方法及相关装置。
背景技术:
1、随着近年来交通运输领域的高速发展,高速列车系统已经成为了一个典型的控制目标。在当前的高速列车设计中,根据列车动力单元的分布可以分两种类型,其一为全驱动型高速列车,其二为欠驱动型高速列车。所谓的全驱动型高速列车可以被解释为:高速列车系统中的每节车厢都拥有自己的动力系统,与之相反的则称为欠驱动型高速列车。相较于全驱动型高速列车,虽然欠驱动型高速列车在节约资源、降低成本等方面具备明显优势,但是欠驱动型高速列车的控制难度更大。而在我国的高速列车系统中,欠驱动型高速列车更是普遍存在,由于欠驱动型高速列车系统是多变量以及变量之间的相互耦合的过程,去实现高速列车的跟踪控制是困难的。
2、在现存的许多研究中,众多研究者们通过在平衡点处近似处理的方式对高速列车系统进行线性化处理。然而,这种做法是不准确且不符合实际情况的。与传统方法相比较,反馈线性化方法最大的特点在于只需要对非线性系统进行反馈变换便能转换为线性系统。因此,针对欠驱动列车的非线性问题设计一种反馈线性化方案是十分具备研究意义的。
技术实现思路
1、本发明的目的是提供一种基于反馈线性化的欠驱动列车滑模控制方法及相关装置,可将欠驱动列车的非线性问题进行反馈变换为线性系统制定滑模控制律,能够实现欠驱动列车的速度和位移有界跟踪。
2、为实现上述目的,本发明提供了如下方案:
3、一方面,本发明提供了一种基于反馈线性化的欠驱动列车滑模控制方法,欠驱动列车包括若干节车厢,相邻的车厢之间通过弹簧-阻尼系统连接;包括以下步骤:
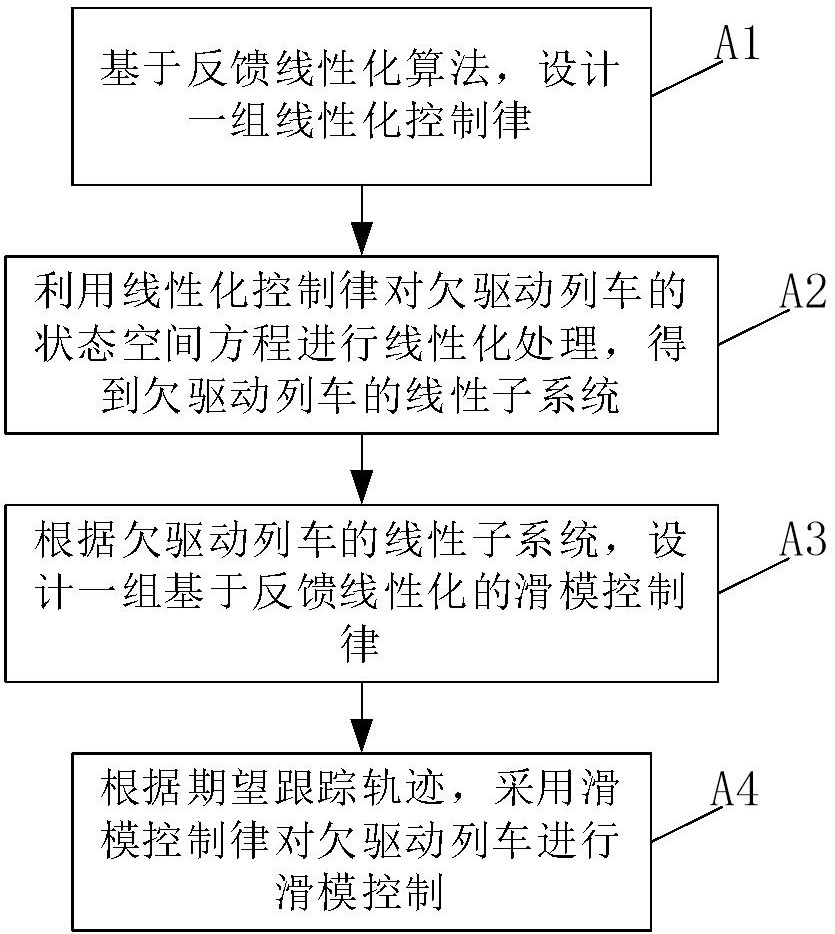
4、基于反馈线性化算法,设计一组线性化控制律。
5、利用线性化控制律对欠驱动列车的状态空间方程进行线性化处理,得到欠驱动列车的线性子系统;欠驱动列车的状态空间方程为根据欠驱动列车的非线性多质点动力学模型确定的状态空间方程。
6、根据欠驱动列车的线性子系统,设计一组基于反馈线性化的滑模控制律。
7、根据期望跟踪轨迹,采用滑模控制律对欠驱动列车进行滑模控制。
8、可选地,欠驱动列车的非线性多质点动力学模型可通过下式表示:
9、。
10、其中,表示第一节车厢的质量,表示第二节车厢的质量,表示第三节车厢的质量,表示第四节车厢的质量,表示第一节车厢的加速度,表示第二节车厢的加速度,表示第三节车厢的加速度,表示第四节车厢的加速度,表示第二节车厢的控制输入,表示第三节车厢的控制输入,表示第一节车厢在t时刻的位移,表示第二节车厢在t时刻的位移,表示第三节车厢在t时刻的位移,表示第四节车厢在t时刻的位移,表示第一节车厢在t时刻的速度,表示第二节车厢在t时刻的速度,表示第三节车厢在t时刻的速度,表示第四节车厢在t时刻的速度,表示第一节车厢与第二节车厢之间连接的弹簧的弹性系数,表示第二节车厢与第三节车厢之间连接的弹簧的弹性系数,表示第三节车厢与第四节车厢之间连接的弹簧的弹性系数,表示第一节车厢与第二节车厢之间连接的阻尼器的阻尼系数,表示第二节车厢与第三节车厢之间连接的阻尼器的阻尼系数,表示第三节车厢与第四节车厢之间连接的阻尼器的阻尼系数,、和表示第一节车厢所受基本阻力的阻力系数,和表示第二节车厢所受基本阻力的阻力系数,和表示第三节车厢所受基本阻力的阻力系数,和表示第四节车厢所受基本阻力的阻力系数,表示第一节车厢所受的附加扰动,表示第二节车厢所受的附加扰动,表示第三节车厢所受的附加扰动,表示第一节车厢所受的附加扰动。
11、可选地,欠驱动列车的状态空间方程可通过下式表示:
12、。
13、其中,表示欠驱动列车系统的状态,表示第一节车厢的位移,表示第一节车厢的速度,表示第一节车厢和第二节车厢的相对位移,表示第二节车厢的速度,表示第二节车厢和第三节车厢的相对位移,表示第三节车厢的速度,表示第三节车厢和第四节车厢的相对位移,表示第四节车厢的速度,表示系统矩阵,表示欠驱动列车系统的控制输入,表示第二节车厢的控制输入信号,表示第三节车厢的控制输入信号,表示输入矩阵,表示欠驱动列车系统所受的基本阻力,,以及均表示系数矩阵,表示欠驱动列车系统所受的附加扰动。
14、可选地,线性化控制律可通过下式表示:
15、。
16、其中,为判别矩阵的逆矩阵,,表示控制输出的李导数,表示控制输出的李导数,和均为需要被设计的等效控制律。
17、判别矩阵可通过下式表示:
18、。
19、其中,为李导数,和为输入矩阵的两个列向量,为控制输出对应的输入-输出相对阶,为控制输出对应的输入-输出相对阶,,,。
20、可选地,滑模控制律可通过下式表示:
21、。
22、其中,表示列车的期望速度的二阶导数,、、和均表示需要被设计的正实数,表示控制输出的滑模函数,表示控制输出的滑模函数,表示第一节车厢的速度跟踪误差的一阶导数,表示时刻,表示欠驱动列车系统的开始时刻,表示时间积分符号,表示符号函数。
23、可选地,还包括以下步骤:
24、根据欠驱动列车的线性子系统,设计一组基于反馈线性化的自适应滑模控制律。
25、根据期望跟踪轨迹,采用自适应滑模控制律对欠驱动列车进行滑模控制。
26、可选地,自适应滑模控制律可通过下式表示:
27、。
28、其中,表示第二节车厢的自适应滑模控制律,表示被定义的自适应滑模控制律的辅助参数的估计值,表示第三节车厢的自适应滑模控制律,表示自适应滑模控制律的辅助参数的估计值,表示列车的期望速度的一阶导数。
29、另一方面,本发明提供了一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述任一项所述的一种基于反馈线性化的欠驱动列车滑模控制方法的步骤。
30、另一方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述任一项所述的一种基于反馈线性化的欠驱动列车滑模控制方法的步骤。
31、另一方面,本发明提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一项所述的一种基于反馈线性化的欠驱动列车滑模控制方法的步骤。
32、根据本发明提供的具体实施例,本发明公开了以下技术效果:
33、本发明提供了一种基于反馈线性化的欠驱动列车滑模控制方法及相关装置,方法包括以下步骤:基于反馈线性化算法,设计一组线性化控制律;利用线性化控制律对欠驱动列车的状态空间方程进行线性化处理,得到欠驱动列车的线性子系统;根据欠驱动列车的线性子系统,设计一组基于反馈线性化的滑模控制律;根据期望跟踪轨迹,采用滑模控制律对欠驱动列车进行滑模控制。本发明针对欠驱动型高速列车提出了一种基于反馈线性化的自适应滑模控制方案去实现列车的速度和位移有界跟踪更加具备现实意义,其中通过将反馈线性化技术应用于欠驱动列车系统来消除非线性项对跟踪控制过程产生的影响。另外,相比传统的反馈线性化技术的应用,本发明将自适应机制融入了传统的反馈线性化技术,使得在系统参数未知的情况仍然能对欠驱动列车系统进行线性化处理。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200055.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。