一种无人机动态轨迹规划与控制联合优化方法
- 国知局
- 2024-08-01 00:14:47
本发明涉及无人机轨迹规划领域,尤其涉及一种动态无人机轨迹规划与控制联合优化方法。
背景技术:
1、近年来,各国大力助推民用无人机的发展,无人机逐渐走进大众视野。与此同时,伴随控制技术的演进、传感器性能的提高、制造成本的降低,无人机技术亦取得巨大的改进和发展,其可用性及普适性得以彰显。无人机逐渐融入我们的日常生活,广泛应用于输电线路巡检、森林火情监测、农业植保、农业灌溉、地质勘探等领域,极大程度地减少了繁重高危的人工作业。
2、一方面,鉴于无人机存在续航性、承载性欠佳的缺陷,设计符合无人机动力学约束且距离较短的飞行路线成为研究热点。然而,现今大多数轨迹规划算法对无人机实际应用中动态场景的复杂性欠缺考虑。另一方面,无人机系统具备非线性、强耦合、欠输入等特性,稳定控制无人机飞行存在一定难度,如何使无人机能够跟随预设轨迹飞行成为另一研究热点。
3、轨迹规划是在满足无人机任务需求和通信目标的条件下,探寻从源节点至目标节点的最佳路径。通常会构建一个代价函数,将轨迹规划转化为一个最优化问题,通常以路径长度或能耗作为代价的一部分,进行最优化求解。在无人机应用领域,任务场景变为三维空间,其维度的提升带来了新的路径规划可能性,即解空间的大小范围呈指数级扩展,并且生成的路径通常还需满足无人机飞行的可行性和安全性要求,这使该问题更具挑战性。现阶段常用方法大致可划分为采样法、图搜索法、群智能仿真算法及人工势场法等。
4、当前,无人机轨迹规划的研究未充分考虑环境的动态特性和实际无人机飞行的动力学限制。目前,针对动态场景下无人机轨迹规划与控制联合优化的研究不足,无人机动态轨迹规划与控制联合优化成为亟待解决的难题。
技术实现思路
1、本发明采用的技术方案为一种结合深度强化学习和反向迭代方法的无人机轨迹规划与控制联合优化方法,用以解决目前无人机轨迹规划与控制联合优化方法存在上述的部分或全部的问题。
2、本发明提供的一种无人机轨迹规划与控制联合优化方法,包括:
3、获取物联网节点位置信息、环境信道、无人机状态信息,并根据所述环境状态信息建立信道模型、能耗模型及数据传输模型。
4、优选地,无人机与地面节点m之间的空地通信可视为视距通信,在任意n时刻的路径损耗模型表示为:
5、
6、其中,α0表示参考距离d0=1时的信道功率,α0的值与载波频率、天线增益等因素有关,dm,n为无人机与物联网节点m之间的距离。
7、那么,节点m在时隙n的数据传输速率为
8、
9、其中,b表示信道带宽,参数pm,n和σ2分别为地面物联网发射功率和信道噪声的功率谱密度,hm,n表示信道增益,参数λm,n表示物联网节点m在时隙n是否被调度与无人机通信,qn和lm分别表示无人机和节点m的位置。
10、优选地,系统能耗主要包括通信能耗和无人机飞行推进能耗,通信能耗包含发送和接收数据能耗,分别表示为和计算如下:
11、
12、
13、其中,eelec,ξfs和ξamp分别是与信号幅度和路径损耗相关的参数,d0为阈值。
14、无人机在时隙n的飞行能耗可表示为
15、
16、上式中,υn和an分别表示无人机的速度和加速度,c1和c2均是与无人机的机翼以及重量有关的参数,g是重力加速度,δt表示一个时隙长度。
17、可定义时隙n系统总能耗为
18、
19、上式中,α为权重系数,m为地面节点总数。
20、同时,构建无人机飞行的系统动态方程如下:
21、sn+1=a0sn+g1an+g2an-1
22、上式中,sn=[qn,υn]t,a0、g1和g2为由控制时延、时隙长度决定的系统参数。
23、那么,可构建无人机动态轨迹规划与控制联合最优化问题为
24、
25、s.t.sn+1=a0sn+g1an+g2an-1
26、
27、
28、
29、
30、上式中,μ为权重系数。
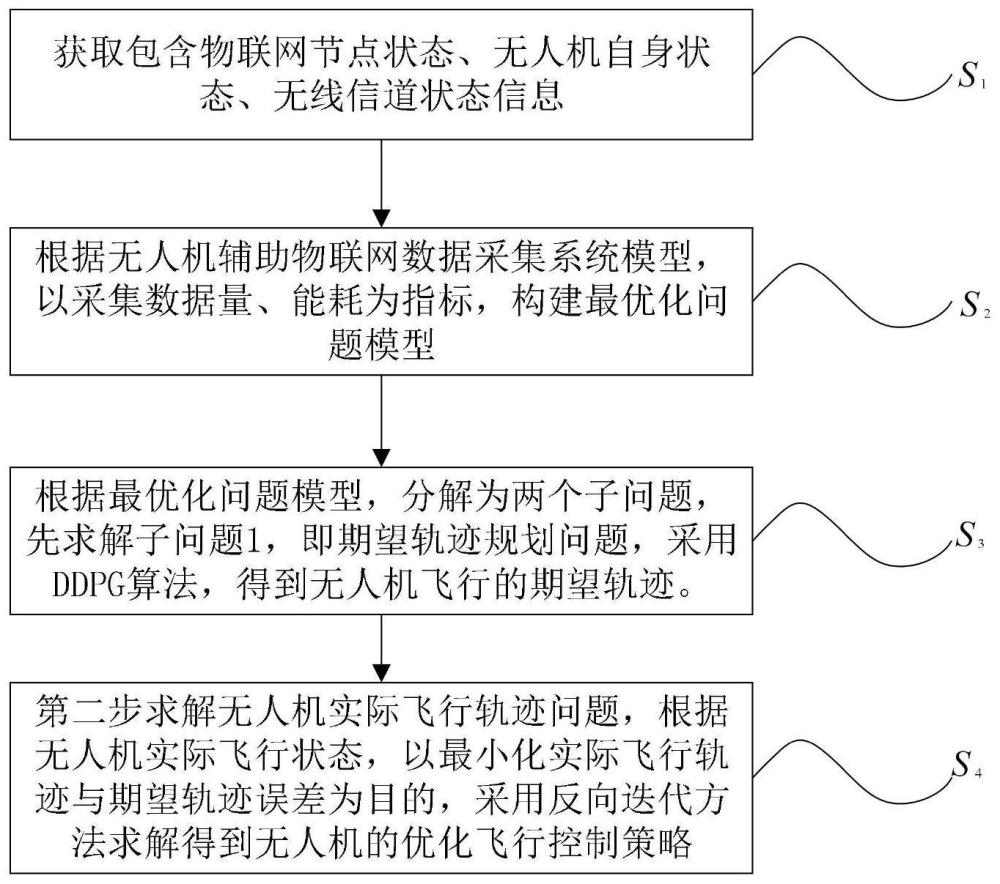
31、对上述最优化问题进行耦合分解,将最优化问题分解为两个子问题:期望轨迹规划子问题和期望轨迹跟踪子问题,并通过两步算法流程实现对无人机轨迹的动态规划与控制。
32、第一步:得到期望轨迹规划。
33、期望轨迹规划子问题为:
34、
35、
36、
37、
38、
39、上式中,q*表示无人机期望轨迹。
40、上述问题中,期望无人机轨迹q*可采用ddpg深度强化学习算法进行求解。
41、第二步:得到实时无人机轨迹控制,其期望轨迹跟踪子问题为:
42、
43、s.t.sn+1=a0sn+g1an+g2an-1
44、上式中,q表示无人机实际飞行轨迹。
45、期望轨迹跟踪子问题,可采用反向迭代方法进行求解,从而得到无人机实时轨迹控制策略。
46、与现有技术相比较,本发明借由无人机期望轨迹规划与实时期望轨迹跟踪,来应对环境动态因素的影响,实现稳定的无人机轨迹规划和控制,提升系统性能。通过与环境持续交互,能够智能地学习并调整飞行轨迹,针对无人机做出实时控制决策,从而适应实际复杂多变的网络动态场景。
技术特征:1.一种无人机轨迹规划与控制联合优化方法,其特征在于,包括:
2.一种无人机轨迹规划与控制联合优化方法,其特征在于,对上述最优化问题进行耦合分解,将最优化问题分解为两个子问题:期望轨迹规划子问题和期望轨迹跟踪子问题,并通过两步算法流程实现对无人机轨迹的动态规划与控制;
技术总结本发明公开了一种无人机动态轨迹规划与控制联合优化方法,将物联网节点位置及能耗、无人机飞行状态及能耗、信道状态等输入至智能轨迹规划算法模型,以达成无人机数据采集任务的轨迹规划目标。联合优化问题能够分解成两个子问题加以求解:即期望轨迹规划子问题和期望轨迹跟踪子问题,其中前者运用深度强化学习算法求解,后者则采用反向迭代方法求解。借由无人机期望轨迹规划与实时期望轨迹跟踪,来应对环境动态因素的影响,实现稳定的无人机轨迹规划和控制,提升系统性能。通过与环境持续交互,能够智能地学习并调整飞行轨迹,针对无人机做出实时控制决策,从而适应实际复杂多变的网络动态场景。技术研发人员:王朱伟,卢矝矝,王豪伟,刘力菡受保护的技术使用者:北京工业大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200221.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。