一种移动作业机器人人机指令融合方法
- 国知局
- 2024-08-01 00:15:08
本发明属于移动作业机器人操作,具体涉及一种移动作业机器人人机指令融合方法。
背景技术:
1、许多老年人大部分时间花在室内,生活空间有限,而他们在日常生活中行动时存在许多困难。因此,如何增强行动不便的老年人生活自主性是当今社会亟待解决的问题。
2、现有研究中单利用语音信号,控制精度存在局限性;而移动作业机器人具有大尺度结构、高负载及冗余设计等多种特点,致使轮式移动机器人操控较为复杂,只依据机器人自主定位及路径规划也不能得到最优的行驶策略。因此,使人类决策和机器人自主规划智能融合,确保移动作业机器人的可靠运行,是一个尚待解决的问题。
3、综上所述,传统的控制方式难以高效完成复杂指令的作业任务,本发明提出一种移动作业机器人人机指令融合方法,解决了这一问题,在动态环境下移动作业机器人作业时,操作者指令会在不同情况下实时变化,机器人可以根据接收到的指令信息,权衡碰撞几率和稳定性并应用到人机的协同工作领域,实现更高水平的人机交互。
技术实现思路
1、本发明的目的是提供一种移动作业机器人人机指令融合方法,解决移动作业机器人动态响应能力不足的问题,在移动作业机器人执行任务过程中,实现将操作者和机器人指令的融合,使移动作业机器人有更好的执行效果,增强移动作业机器人人机交互能力。
2、本发明为解决上述问题所采取的方案为:一种移动作业机器人人机指令融合,所述方法的具体实现过程为:
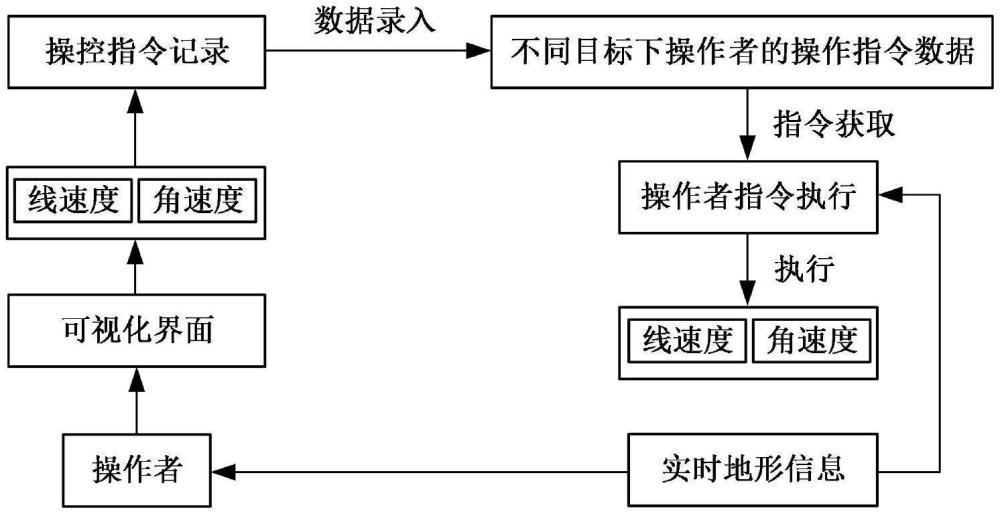
3、步骤1:实时监测操作者语音指令,记录机器人在训练区域的位置、速度和偏航角指令,(训练区域指与移动作业机器人监测相匹配的地形,包括规则地形和障碍物的分布区域。)动态调整记录频率以满足不同目标需求。机器人根据记录的数据实现自主决策,实现移动和转向等操作;
4、步骤2:提出一种动态分配的权重因子的方法,建立所述的收益函数与权重因子的评定关系,利用收益函数评判在实际场景中不同指令的优劣性;
5、步骤3:设计碰撞性与稳定性判据,建立机器人在速度约束下的可达控制集,利用滚动窗口的动态避障算法检测碰撞的可能性,并通过倾覆稳定裕度评判机器人的稳定性,以应对倾翻、撞击等风险;
6、步骤4:建立动态分配的收益函数值与机器人的碰撞几率与稳定裕度的转换关系,针对不同指令,机器人通过衡量接收语音指令前后的稳定裕度和碰撞几率,动态调节所设计的权重因子。
7、本发明的有益效果:
8、所述的一种移动作业机器人人机指令融合方法,一方面能够实现人机双方进行决策时指令冲突问题,机器人通过操作者介入指令,结合收益函数,从而预测出自身的安全性。另一方面,本发明设计的协同操控方法,可以动态实现人机操控指令的最优分配,提高了移动作业机器人的功能性。
技术特征:1.一种移动作业机器人人机指令融合方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,提出一种动态分配的权重因子的方法,建立所述的收益函数与权重因子的评定关系,包括:
3.根据权利要求1所述的方法,其特征在于,设计碰撞性判据与稳定性判据,包括:
4.根据权利要求1所述的方法,其特征在于,建立动态分配的收益函数值与机器人的碰撞几率与稳定裕度的转换关系,包括:
技术总结本发明属于移动作业机器人操控技术领域。本发明公开了一种移动作业机器人人机指令融合方法,解决了移动作业机器人执行任务过程中操作者和机器人的指令融合的问题。本发明所述的一种移动作业机器人人机指令融合方法,当移动作业机器人执行目标任务的过程中,其运行轨迹不满足人类的预期时,操作者会进行指令干预,移动作业机器人的稳定裕度、碰撞几率会改变收益函数的权重占比,从而动态调节人机指令融合的权重分配。本发明能够求解出操作者与机器人操控指令的最佳组合,有效的提高移动作业机器人面对不同介入指令时的适应性。技术研发人员:尤波,韩逸妹,李佳钰,陈晨,程晨晨受保护的技术使用者:哈尔滨理工大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200266.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。