一种犬舍自动饲喂设备流量控制优化方法与流程
- 国知局
- 2024-08-01 00:16:10
本发明属于pid控制优化领域,尤其涉及一种犬舍自动饲喂设备流量控制优化方法。
背景技术:
1、随着宠物行业的快速发展,犬舍饲养规模不断扩大,传统的人工饲喂方式面临效率低、劳动强度大、饲料浪费严重的问题。自动饲喂设备的引入,有效地解决了这些困扰,通过自动化技术实现了高效、精准的饲料管理。自动饲喂设备最早应用于农业领域的畜牧养殖,旨在通过机械化和自动化技术,提高生产效率和管理水平。近年来,这一技术逐步扩展至宠物饲养领域,尤其是在大规模犬舍和繁殖中心中,自动饲喂设备的优势更加显著。犬舍自动饲喂设备主要由饲料储存库、输送机、饲喂槽组成,饲料储存库用于存储大批量饲料,输送机负责将特定流量的饲料输送至饲喂槽。这一系统的应用,不仅提高了饲喂效率,减少了人工成本,还通过精确控制饲料分配量,避免了浪费,确保每只犬得到合理的营养供给。
2、犬舍自动饲喂设备流量控制一般采用pid控制方法,pid控制电机,进而电机运转带动输送机输送对应流量的饲料至饲喂槽。pid控制是一种广泛应用于控制系统中的控制算法,其名称源于其三项基本调节参数:比例(proportional)、积分(integral)和微分(derivative)。比例参数是通过当前误差调整控制输出,积分参数是通过累积误差调整控制输出,微分参数是通过误差变化率调整控制输出;pid控制通过这三项参数的组合来调整控制输出,使得系统的误差最小化。优点是通过调整比例、积分和微分参数,可以应对快速响应变化的工况,实现系统的实时控制,但也存在参数调整耗时复杂和稳定性差的缺点,会对犬舍自动饲喂设备流量控制系统的稳定性和性能产生影响。
3、电阻电容优化算法(resistance-capacitance optimizer algorithm,rcoa)是一种受电路中电阻和电容响应启发的元启发式优化算法,用于解决复杂的数值计算和工程设计优化问题,算法的灵感来自电路中电阻和电容的相互作用。算法迭代过程是用来更新电容两端的电压值,从而使得电路达到最优性能。该算法具有收敛速度快、求解精度高的优点,但在算法迭代过程中种群多样性易减少,进而算法过早陷入局部最优解,从而在实际应用中无法达到最佳的性能。
技术实现思路
1、本发明的目的在于:为了解决传统人工饲喂方式带来的饲喂效率低、饲料浪费严重的问题,提出一种犬舍自动饲喂设备流量控制优化方法,采用pid控制方法,即pid控制电机,进而电机运转带动输送机输送对应流量的饲料至饲喂槽。并且通过改进电阻电容算法优化犬舍自动饲喂设备流量控制系统的pid控制器控制参数kp、ki、kd,解决了传统pid控制器参数调整耗时复杂和稳定性差的问题,提高犬舍自动饲喂设备流量控制的鲁棒性和稳定性。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种犬舍自动饲喂设备流量控制优化方法,具体步骤为:
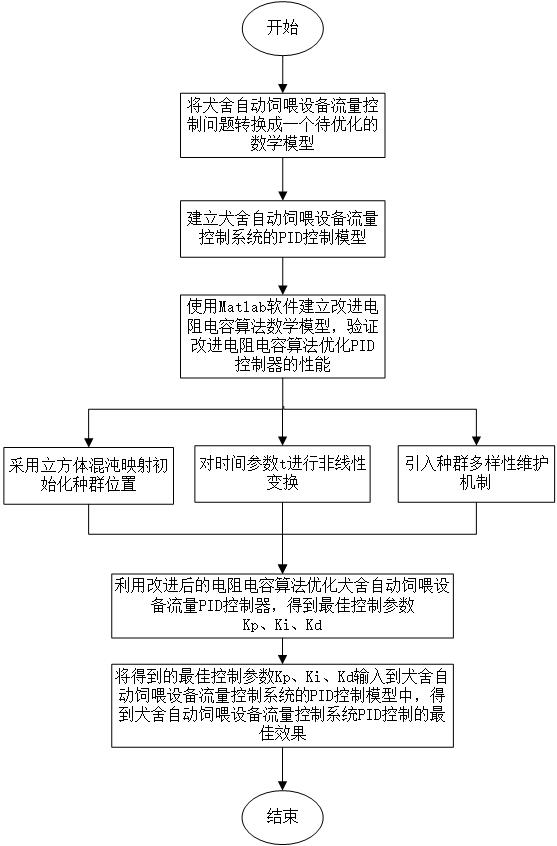
4、步骤一:将犬舍自动饲喂设备流量控制问题转换成一个待优化的数学模型。
5、步骤二:建立犬舍自动饲喂设备流量控制系统的pid控制模型。
6、步骤三:使用matlab软件建立改进电阻电容算法数学模型,验证改进电阻电容算法优化pid控制器的性能;所述改进电阻电容算法包括:
7、d1、采用立方体混沌映射初始化种群位置;
8、d2、对时间参数t进行非线性变换;
9、d3、引入种群多样性维护机制,在迭代过程中若当前时刻种群多样性少于初始种群多样性时,则引入新个体来增强种群多样性;具体如下。
10、step1、在算法初始化阶段,采用立方体混沌映射初始化种群位置,改进后的初始化种群位置的公式为:
11、(1);
12、(2);
13、式中,为第i个电容两端的初始电压值,为算法搜索上界,为算法搜索下界,为产生的混沌序列的第i个变量值,n为种群数量,为介于0到1之间的随机数;
14、step2、在算法寻优阶段,对时间参数t进行非线性变换,改进后的位置更新公式为:
15、(3);
16、(4);
17、(5);
18、式中,为下一时刻总响应下电容两端的电压值,为瞬态响应下电容两端的电压值,为稳态响应下电容两端的电压值,t为时间,为常数,a取值为5,b和r1是介于0到1之间的随机数,为当前迭代次数,为最大迭代次数;
19、step3、引入种群多样性维护机制,在迭代过程中若当前时刻种群多样性少于初始种群多样性时,则通过式(10)引入新个体来增强种群多样性,公式为:
20、(6);
21、(7);
22、(8);
23、(9);
24、(10);
25、式中,为当前时刻种群多样性,为当前时刻总响应下第i个电容两端的电压值,为当前时刻总响应下所有电容两端电压的平均值,为初始种群多样性,为初始所有电容两端电压的平均值,为第i个电容两端的新电压值,,,是从当前迭代中随机选择的不同电压值,为放缩因子取值为0.5,其他参数意义同步骤step1和步骤step2。
26、步骤四:利用改进后的电阻电容算法优化犬舍自动饲喂设备流量pid控制器,得到最佳控制参数kp、ki、kd。
27、步骤五:将得到的最佳控制参数kp、ki、kd输入到犬舍自动饲喂设备流量控制系统的pid控制模型中,得到犬舍自动饲喂设备流量控制系统pid控制的最佳效果。
28、进一步地,所述步骤一中,待优化的数学模型公式为:
29、;
30、式中,f为适应度值,n为样本数量,为犬舍自动饲喂设备流量控制系统中的实际流量值,为犬舍自动饲喂设备流量控制系统中的期望流量值。
31、更进一步地,待优化的数学模型公式选用均方根误差函数,通过将误差平方后求和再开根号,可以得到更加平滑的处理效果,也避免了正负误差相互抵消的情况,因此有助于提升模型的性能和预测精度。
32、进一步地,所述步骤二中,建立犬舍自动饲喂设备流量控制系统的pid控制模型,模型包括输入模块、误差计算模块、流量pid控制器模块、改进电阻电容算法模块、电机模块、流量检测模块、饲料输送模块;所述饲料输送模块包括输送机和饲喂槽;期望流量值从输入模块输入,与流量检测模块检测到的实际流量值一并输入到误差计算模块做差得到流量误差值,流量pid控制器模块接收流量误差值,并应用改进电阻电容算法模块优化后的pid参数进行计算得到参考流量值,进而控制电机运转带动输送机输送对应流量的饲料至饲喂槽,实现犬舍自动饲喂设备流量的控制。
33、进一步地,所述步骤三中,在算法初始化阶段,采用立方体混沌映射初始化种群位置,通过立方体混沌映射初始化种群,可以确保初始种群在解空间内均匀分布,避免种群集中在某些特定区域,从而提高种群的多样性。
34、进一步地,所述步骤三中,在算法寻优阶段,对时间参数t进行非线性变换,非线性参数t能够更好的平衡瞬态响应和稳态响应这两个阶段,使得算法在初期可以进行更广泛的探索,而在后期则更加集中于精细的搜索,适应不同问题的需求,提升优化效果。
35、进一步地,所述步骤三中,引入种群多样性维护机制,当算法在迭代过程中种群多样性少于初始种群多样性时,通过引入新的个体增强种群多样性,确保种群在解空间中的广泛分布,有助于防止算法在优化过程中过早陷入局部最优解。
36、进一步地,所述步骤四中,利用改进后的电阻电容算法优化犬舍自动饲喂设备流量pid控制器,得到最佳控制参数kp、ki、kd,具体步骤为:
37、s1、将待优化的数学模型作为改进电阻电容算法的目标函数,其中,目标函数作为适应度函数评估每个候选解的优越性;
38、s2、模拟犬舍自动饲喂设备流量控制系统的工况,设计传递函数描述系统的动态特性;
39、s3、给定犬舍自动饲喂设备流量控制系统的输入,输入即控制系统中输送机输送饲料的期望流量值;
40、s4、初始化改进电阻电容算法的种群数量n、问题维度d、算法搜索上界、算法搜索下界、最大迭代次数;
41、s5、通过将犬舍自动饲喂设备流量pid控制器的参数kp、ki、kd编码为电阻电容算法搜索空间的解,随着算法的迭代进行,种群个体的位置即反映出相应的流量pid控制器参数解;
42、s6、根据适应度函数计算当前迭代种群个体适应度值,将最小适应度值记录下来,并与上次迭代的种群最优适应度值比较,保留最优适应度值;
43、s7、建立改进电阻电容算法的种群个体位置更新策略数学模型,利用所述数学模型更新电容两端的电压值,即更新犬舍自动饲喂设备流量pid控制器的kp、ki、kd参数;
44、s8、若更新后电容两端的电压值比上一次迭代更新的电压值更优,则保留当前最优解;
45、s9、根据公式(6)-(9)判断当前时刻种群多样性是否少于初始种群多样性,若是,则通过公式(10)引入新个体来增强种群多样性,并返回执行s6,否则继续向下执行;
46、s10、当前迭代次数是否达到最大迭代次数,若达到,则退出循环,输出全局最优解,并分配给犬舍自动饲喂设备流量pid控制器作为kp、ki、kd三个参数,否则返回执行s3。
47、更进一步地,所述s2中,模拟犬舍自动饲喂设备流量控制系统的工况,设计传递函数描述系统的动态特性;设计的传递函数表达式为:
48、;
49、式中,s为复数频率变量。
50、更进一步地,所述s5中,通过将犬舍自动饲喂设备流量pid控制器的参数kp、ki、kd编码为电阻电容算法搜索空间的解,编码向量为:
51、;
52、式中,x为编码向量,kp、ki、kd分别为犬舍自动饲喂设备流量pid控制器的比例参数、积分参数和微分参数。
53、更进一步地,所述s7中,建立改进电阻电容算法的种群个体位置更新策略数学模型,具体步骤为:
54、s71、算法初始化阶段,采用立方体混沌映射初始化种群位置,按照公式(1)-(2)建立初始化种群位置数学模型;
55、s72、算法寻优阶段,对时间参数t进行非线性变换,按照公式(3)-(5)建立位置更新策略数学模型。
56、综上所述,由于采用了上述技术方案,本发明的有益效果是:
57、本发明提出一种犬舍自动饲喂设备流量控制优化方法,采用pid控制方法,即pid控制电机,进而电机运转带动输送机输送对应流量的饲料至饲喂槽。通过在算法初始化阶段采用立方体混沌映射初始化种群位置,在算法寻优阶段对时间参数t进行非线性变换以及引入种群多样性维护机制改进电阻电容算法,提高算法的全局搜索能力和精度。利用改进后的电阻电容算法优化犬舍自动饲喂设备流量pid控制器,得到最佳控制参数kp、ki、kd,将得到的最佳控制参数kp、ki、kd输入到犬舍自动饲喂设备流量控制系统的pid控制模型中,提高犬舍自动饲喂设备流量控制系统的稳定性和鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200356.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表