一种考虑执行器与传感器攻击的固定时间车队控制方法
- 国知局
- 2024-08-01 00:19:41
本发明涉及车辆队列控制,尤其涉及一种考虑执行器与传感器攻击的固定时间车队控制方法。
背景技术:
1、车辆队列控制系统是指通过为跟随车辆设计合适的控制器,使它们能够在给定的间距策略下跟踪领导者的轨迹。在减少空气污染,缩短相邻车辆间距,减少交通事故,增加道路容量,提高道路安全性等方面具有重要意义。近年来,车辆队列控制系统被认为是智能交通系统中最有前途的技术,随着交通事故的不断增多,车辆队列控制中的安全问题日益突出。网联车辆中的传感器与执行器攻击问题得到了广泛研究。porter等人使用卡尔曼滤波器结合χ2检测器获得了对传感器攻击良好的检测性能。传感器冗余被van等人用于为单个车辆在传感器攻击下提供检测和隔离算法。mousavineja等人提出了一种利用集合隶属度滤波技术检测网联车辆中传感器攻击的算法。为了补偿物理攻击对网联非线性车辆造成的偏置注入的不利影响,li等人设计了一个观测器来提供物理攻击和未知非线性项的实时估计。此外,滑模控制被广泛用于降低网联车辆控制中不确定性对队列稳定的影响。wang等人提出了一种基于自适应终端滑模控制的弹性控制方法,用于不确定条件下车辆队列的弹性控制。gao等人采用基于固定时间技术的滑模控制方法来遏制车辆队列控制中的未知扰动。
2、当模型存在误差或过程噪声和测量噪声的协方差存在不确定性时,porter等人的检测方法性能就会下降。van等人的安全控制方案在实际应用中受到传感器数量的限制。以上攻击解决工作主要集中在检测和隔离上,对物理攻击导致的系统性能下降问题的解决较少,且未考虑实际车辆系统中存在未知的非线性,这些非线性是由未知的道路条件(如道路坡度)和未知的干扰(如风阻力)引起的。扰动观测器的精度和响应速率是系统抗扰性的关键,li等人的安全控制策略未充分考虑该问题。wang等人提出的终端滑模控制方案收敛时间受系统初始状态影响。gao等人的控制方案中系统奇异性、抖振、控制器参数的复杂性以及收敛速率等问题仍有待改进解决。
技术实现思路
1、本发明要解决的技术问题是针对上述现有技术的不足,提供一种考虑执行器与传感器攻击的固定时间车队控制方法,可同时估计攻击和扰动,保证系统单车稳定性和队列稳定性。
2、为解决上述技术问题,本发明所采取的技术方案是:
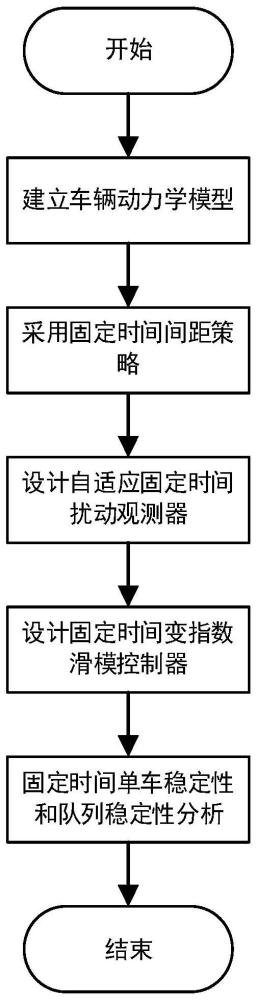
3、一种考虑执行器与传感器攻击的固定时间车队控制方法,包括以下步骤:
4、步骤1、根据车辆实际情况,建立存在执行器与传感器攻击的非线性车辆模型;
5、步骤2、采用恒定时间间距策略,给出假设,明确控制目标;
6、步骤3、设计自适应固定时间扰动观测器;
7、步骤4、设计具有变指数固定时间稳定性的滑模控制器,实现固定时间车队控制。
8、进一步地,所述步骤1中,建立的存在执行器与传感器攻击的非线性车辆模型如下:
9、
10、
11、
12、
13、其中,xi(t)、vi(t)、ai(t)分别代表车辆i的位置、速度、加速度;ξi=migbicosδi+migsinδi代表道路坡度函数,mi为车辆质量,ωi(t)为外部干扰,ρa为空气密度,δi为道路坡度角,cai为阻力系数,ai为正面横截面积,ui为控制输入,τi为发动机时间常数,g为重力加速度,bi为道路阻力系数;
14、当i=0时,车辆为领导者,领导者动力学表示为:
15、
16、执行器攻击为:
17、
18、位置传感器攻击为:
19、
20、其中,δuai和δxsi是攻击注入变量,λai和λsi是值为1或0的二进制变量;如果λai=1,表示执行器受到攻击,λai=0表示执行器不受攻击;λsi=1表示位置传感器受到攻击,λsi=0表示传感器不受攻击;ψai(t)和ψsi(t)是攻击策略变量;u0i为未受执行器攻击的控制器输出,xi为未受传感器攻击的车辆位置状态;ui为受执行器攻击后的控制器输出,xatki为受传感器攻击后的车辆位置状态。
21、将fi(vi,ai)改写为fi(vi,ai)=f0i(vi,ai)+δfi(vi,ai),其中,f0i(vi,ai)和δfi(vi,ai)分别表示已知项和不确定项;
22、进而车辆i的动力学变为:
23、
24、
25、
26、其中,δlumpi=δfi(vi,ai)+wi(t)+δuai表示作用于车辆i的集总扰动,di(t)、wi(t)分别为加速度通道的不匹配扰动和执行器输出通道的匹配扰动。
27、进一步地,所述步骤2的具体内容如下:
28、假设条件:执行器攻击、传感器攻击和扰动满足以下要求:
29、
30、
31、其中,为未知正常数;
32、恒定时间间距策略为:定义间距跟踪误差为ei=xi-1-xi-li-hvi-δi,其中,li为车辆i的长度,h表示车辆队列系统中的延迟,δi表示车间最小安全距离;
33、控制目标为:
34、目标一:固定时间单车稳定性;在给定时间ti内,相邻车辆之间可以保持期望的间距,即,且当t≥ti时ei=0;
35、目标二:固定时间队列稳定性;给定时间tiπ后,间距跟踪误差ei沿队列不增加,即当t≥tiπ,其中,ei(s)表示ei(t)的拉普拉斯变换。
36、进一步地,所述步骤3中,设计的自适应固定时间扰动观测器为:
37、
38、其中,k=1,2,3,为辅助变量,ρik>0为待设计参数;fi1(t)=vi(t),fi2(t)=ai(t),fi3(t)=f0i(vi,ai,t)+u0i;是xi1=xi(t)、xi2=vi(t)、xi3=ai(t)的估计值;是δi2=di(t)、δi3=δlumpi的估计值;sig1ik(t)、sig2ik(t)的表达式分别如下:
39、
40、
41、其中,α1ik、β1ik、α2ik、β2ik都是正常数,满足0<α1ik/β1ik<1,0<α2ik/β2ik<1;为待设计参数;
42、φζik(t)和γik(t)为辅助变量,其自适应律分别设计为:
43、
44、
45、其中,φζik(0)>0,cik=1-2α1ik/β1ik;lζik、oζik、为正参数;τik为待选时间常数,γik(t)的自适应律参数满足εγik是一个小的正标量,c1ik>0,c2ik>0;ωeqik、δγik(t)均为所设计的辅助变量,γ0ik为待设计参数。
46、进一步地,所述步骤4中设计具有有限时间稳定性的自适应滑模控制器分为两步:
47、首先,改进的变指数固定时间收敛系统为:
48、
49、对于一个非线性系统λ>1、n∈n+均为待设计参数,系统在固定时间t(x0)内收敛到零,满足:
50、
51、其中,exp为自然对数的底数;
52、为实现车辆队列稳定,耦合变量设计为:
53、
54、其中,n为车辆总数;q<1是一个正参数;πi(t)和ei(t)是等价的,即πi(t)和ei(t)同时收敛到0;
55、其次,基于改进收敛系统的变指数固定时间滑模面设计为:
56、
57、其中,si(t)为所设计滑模面,ki>0,λi>1为待设计参数;
58、固定时间滑模控制器设计为:
59、
60、其中,为待设计参数,n∈n+;i=1,2,…,n-1时,zi表达式为:
61、
62、i=n时,zi表达式为:
63、zi=q[-hf0i+(ai-1-ai)+k(πi)(vi-1-vi-hai)]
64、k(πi)表达式为:
65、
66、ξ1i、ξ2i为辅助集总扰动,定义分别如下:
67、
68、ξ2i=δ(i-1)1-δi1-hδi2
69、分别为辅助集总扰动ξ1i、ξ2i的估计值,通过步骤3中的自适应固定时间扰动观测器估计得到;通过耦合量的设计实现固定时间车队控制。
70、采用上述技术方案所产生的有益效果在于:本发明提供的考虑执行器与传感器攻击的固定时间车队控制方法,提出的自适应固定时间扰动观测器,不仅在给定时间内实现了对车辆未知非线性、执行器与传感器攻击的估计,而且由于自适应率的设计,参数可以更快地适应扰动导数的上界,因此相较于传统固定时间扰动观测器具有更高的估计精度和更快的响应速率。基于所改进的变指数固定时间收敛系统,本发明设计的具有固定时间稳定性的滑模控制方案,具有比传统固定时间滑模控制更快的收敛速度和更简单的控制器结构。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200615.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表